реконструкция. Звена
 Скачать 6.05 Mb. Скачать 6.05 Mb.
|

|
1. Структурный анализ плоского рычажного механизма .1 Структурная схема механизма 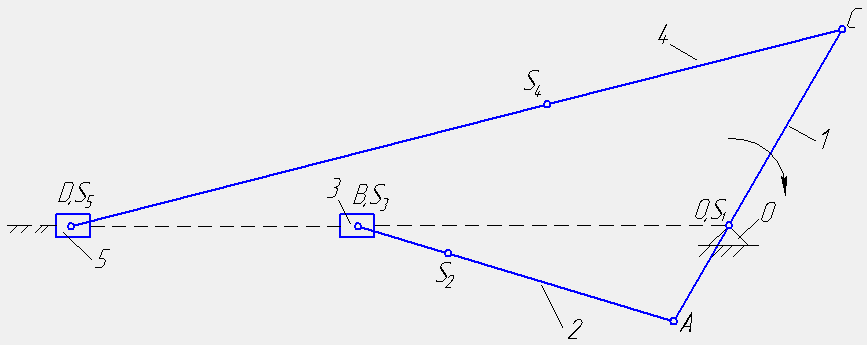 Рисунок 1.1 - Структурная схема механизма Таблица 1 - Звенья механизма
Структурная схема механизма состоит из пяти подвижных звеньев и неподвижной стойки, представленной шарнирно-неподвижной опорой и двумя направляющими ползунов 3 и 5. .2 Подвижность механизма Подвижность механизма определяем по формуле Чебышева: где W - подвижность механизма; n - число подвижных звеньев; p5 и p4 - соответственно число пар пятого и четвертого класса. Для определения значений p4 и p5 найдем все кинематические пары, входящие в состав рассматриваемой кинематической цепи. Результаты исследования заносим в таблицу 1. Таблица 2 - Кинематические пары
Из анализа данных (таблица 2) следует, что исследуемая схема кривошипно-ползунного механизма представляет собой замкнутую кинематическую цепь и состоит из семи пар пятого класса, пар четвертого класса в составе структуры нет. Следовательно, p5=7, а p4=0. Подставив найденные значения n, p4 и p5 в формулу (1), получим: Полученный результат означает, что для однозначного описания положения всех звеньев механизма в рассматриваемой плоскости достаточно знать одну обобщенную координату φ1. .3 Анализ состава структуры механизма Для решения данной задачи используется структурная классификация механизмов, предложенная профессором Ассуром, согласно которой плоские рычажные механизмы состоят из структурных групп звеньев и первичных (элементарных) механизмов. Начиная с выходных звеньев - ползунов 3 и 5, разбиваем рассматриваемую схему кривошипно-ползунного механизма на группы звеньев. При этом руководствуемся следующим правилом: если выделенная группа звеньев обладает совместно нулевой подвижностью, то эта группа звеньев является структурой группой Ассура (СГА). Количество подвижных звеньев определяет класс СГА. Поводок - это конечное звено СГА, входящее в состав кинематической пары и имеющее свободный элемент звена. Количество поводков определяет порядок группы, а вид СГА определяется ее структурной схемой. Рассмотрим группу звеньев 2-3 (рисунок 1.2). 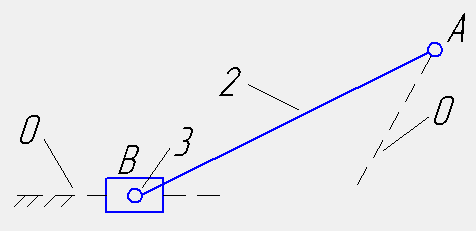 Рисунок 1.2 - Группа звеньев 2-3 Данная группа состоит из двух подвижных звеньев: шатун 2 и ползун 3, и трех кинематических пар: -2 вращательная пара пятого класса; -3 вращательная пара пятого класса; -0 поступательная пара пятого класса. Следовательно, структурная формула - ВВП, являющаяся вторым видом. Поводки представлены звеном 1 и направляющей ползуна. Таким образом, n=2, p5=3, а p4=0. Подставив выявленные значения в формулу (1), получим: Следовательно, группа звеньев 2-3 является структурной группой Ассура второго класса, второго порядка, второго вида. Рассмотрим группу звеньев 4-5 (рисунок 1.3). 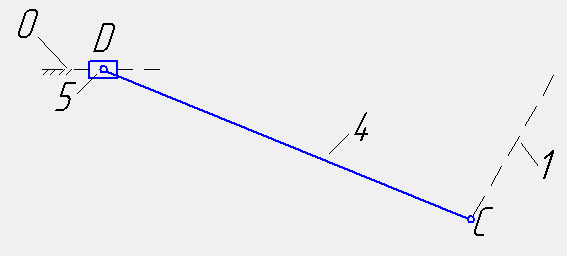 Рисунок 1.3 - Группа звеньев 4-5 Данная группа состоит из двух подвижных звеньев: шатун 4 и ползун 5, и трех кинематических пар: -4 вращательная пара пятого класса; -5 вращательная пара пятого класса; -0 поступательная пара пятого класса. Следовательно, структурная формула - ВВП, являющаяся вторым видом. Поводки представлены звеном 1 и направляющей ползуна. Таким образом, n=2, p5=3, а p4=0. Подставив выявленные значения в формулу (1), получим: Следовательно, группа звеньев 4-5 является структурной группой Ассура второго класса, второго порядка, второго вида. Рассмотрим группу звеньев 0-1 (рисунок 1.3). 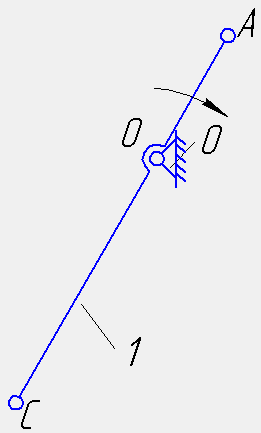 Рисунок 1.3 - Группа звеньев 0-1 Данная группа состоит из подвижного звена кривошипа 1, стойки 0 и одной кинематической пары (вращательная 0-1) Тогда n=1, p5=1, а p4=0. Подставив найденные значения в формулу (1), получим: Следовательно, группа звеньев 0-1 не является структурной группой Ассура, а представляет собой первичный механизм, подвижность которого равна единице, т.е. существует одна обобщенная координата. Из проведенного анализа следует, что число степеней свободы механизма равно единице; механизм имеет следующий структурный состав (рисунок 1.4): первичный механизм с подвижностью равной единице и две структурные группы Ассура второго класса, второго порядка, второго вида.  Рисунок 1.4 - Структурный состав кривошипно-ползунного механизма Вывод: подвижность механизма определяется подвижностью первичного механизма, входящего в его состав. Класс механизма определяется классом наиболее сложной структурной группы. Рассмотренный механизм является механизмом второго класса. . Синтез кинематической схемы плоского рычажного механизма Для построения кинематической схемы плоского рычажного механизма выберем масштабный коэффициент.  где µl - масштабный коэффициент длин, м/мм; Отрезок |OA| принимаем равным 19,5 мм. В этом случае масштабный коэффициент будет равен: Размеры остальных звеньев высчитываем по формуле:  , (2.2) , (2.2)где i - номер звена, для которого вычисляется длина на кинематической схеме. Длины звеньев с учетом масштабного коэффициента:  ; ; ; ; ; ; ; ;Построим по заданным геометрическим параметрам кинематическую схему механизма в масштабном коэффициенте . Кинематический анализ плоского рычажного механизма .1 Построение плана положений механизма План положений - графическое изображение взаимного расположения звеньев в данный момент времени, выполненный в определенном масштабном коэффициенте. Построим положения механизма через каждые 30 градусов вращения кривошипа, начиная от одного из крайних положений. Каждое положение строится тем же методом, что и кинематическая схема механизма. Пронумеруем положения от 0 до 12. .2 Построение планов скоростей относительно 12-ти положений ведущего звена Для построения планов скоростей необходимо составить векторные уравнения скоростей. Проанализируем полученную схему кривошипно-ползунного механизма: точка Вектор скорости точки Линия действия вектора скорости Модуль скорости звена где VAO - модуль скорости звена ОА, м/с; ω1 - угловая скорость звена Для вычисления величины модуля скорости звена где ω1 - угловая скорость звена, с-1; π - 3,14; n - количество оборотов в минуту, об/мин. Подставив заданные значения в выражение (3.2), получим:  Подставив найденное значение угловой скорости в выражение (3.1), получим: Вектор скорости точки В то же время точка Совместное решение последних двух выражений позволит определить модуль и направление действия вектора скорости точки Вектор скорости точки |
 вращательное
вращательное сложное
сложное поступательное
поступательное сложенное
сложенное поступательное
поступательное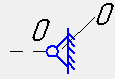 неподвижное
неподвижное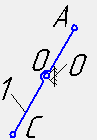 1В5
1В5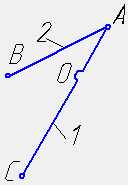 1В5
1В5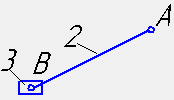 1В5
1В5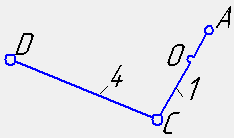 1В5
1В5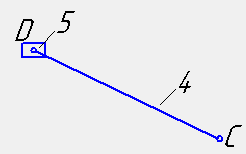 1В5
1В5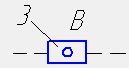 1П5
1П5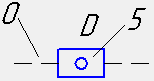 1П5
1П5