Следящая система
 Скачать 146 Kb. Скачать 146 Kb.
|

|
САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ТЕЛЕКОММУНИКАЦИЙ ИМ. ПРОФ. М. А. БОНЧ-БРУЕВИЧА Факультет информационных систем и технологий Кафедра Интеллектуальных систем и автоматизации управления КУРСОВОЙ ПРОЕКТ НА ТЕМУ: «СЛЕДЯЩАЯ СИСТЕМА» ПО ДИСЦИПЛИНЕ «ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ» Выполнил студент гр. ИСТ-841 направление подготовки 15.03.04 Выжлова А.К. ____________ «___»_______________ 2021 Приняла проф., д.т.н. Верхова Г. В. _______________ Оценка: ______ «___»_______________ 2021 Санкт-Петербург 2021 СодержаниеИсходные данные 3 ЧАСТЬ I 4 §1 Следящая система 4 ЧАСТЬ II 6 §1 Уравнения звеньев системы 6 §2 Передаточные функции звеньев системы 9 §3 Приведение системы уравнений по звеньям к единому дифференциальному уравнению 10 ЧАСТЬ III 12 §1 Получение уравнения статики системы и его использование при расчете системы 12 §2 Проверка системы на устойчивость 13 §3 Определение параметров системы по наибольшей степени устойчивости 15 §4 Определение параметров линейной системы автоматического регулирования по наименьшей квадратичной оценке качества. 18 §5 Проверка САУ на устойчивость по методу Гурвица 23 §6 Проверка САУ на устойчивость по методу Рауса 24 §7 Проверка САУ на устойчивость по методу Михайлова. 25 §8 Проверка устойчивости САУ по критерию Найквиста 26 ЧАСТЬ IV 28 §1 Построение АФХ разомкнутой САУ. 28 §2 Построение ЛАЧХ и ЛФЧХ разомкнутой системы. 30 Вывод 33 Исходные данныеТ1 = 0.8 с К0 = 1.5; α(t) = 2.5 рад; γ = 15 угл. мин; α = 1,5 рад/с. ЧАСТЬ I§1 Следящая система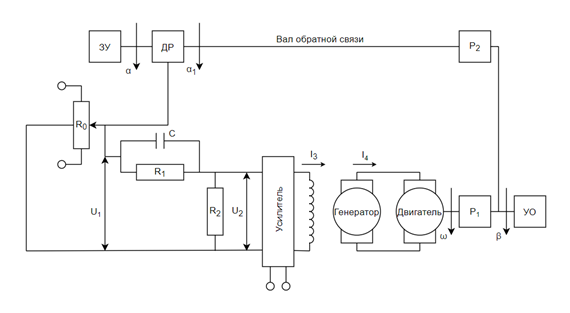 Рис. 1 Функциональная схема следящей системы. ЗУ – задающее устройство; ДР – датчик рассогласования; R0 – потенциометр; Р1, Р2 – редукторы; УО – управляемый объект. Краткое описание системы Система предназначена для слежения в постоянном масштабе вала управляемого объекта за задающим валом. Механический дифференциал выполняет функцию датчика рассогласования сравнивая углы поворота вала задающего устройства и вала обратной связи 1, полученное рассогласование  с помощью потенциометра преобразуется в напряжение U1, которое подается на вход дифференцируемого контура состоящего из емкости и сопротивлений R1 и R2. Усиленный усилителем ток I3, поступает на обмотку возбуждающего генератора, цепь якоря которого последовательно соединена с цепью якоря двигателя постоянного тока с независимым возбуждением. Двигатель через редуктор Р1 поворачивает вал управляемого объекта на угол с помощью потенциометра преобразуется в напряжение U1, которое подается на вход дифференцируемого контура состоящего из емкости и сопротивлений R1 и R2. Усиленный усилителем ток I3, поступает на обмотку возбуждающего генератора, цепь якоря которого последовательно соединена с цепью якоря двигателя постоянного тока с независимым возбуждением. Двигатель через редуктор Р1 поворачивает вал управляемого объекта на угол  . Т.к. датчик рассогласования должен сравнивать величину одного масштаба в цепь обратной связи включен редуктор Р2, задача которого изменение масштаба угла в . Т.к. датчик рассогласования должен сравнивать величину одного масштаба в цепь обратной связи включен редуктор Р2, задача которого изменение масштаба угла в  раз. раз.ЧАСТЬ II§1 Уравнения звеньев системыУравнение управляемого объекта с двигателем.  I – приведенный к валу объекта момент инерции всех масс, связанных с этим валом; Мвр – вращающий момент на валу объекта; МТ – момент сил трения и сопротивления; МНГ – момент внешней нагрузки на объект;  I4 – ток цепи якоря двигателя.   Уравнение управляемого объекта с двигателем принимает вид.     Уравнение обратной связи.  Уравнение датчика рассогласования.  Уравнение потенциометра.  Уравнение дифференцирующего контура.      Полезный сигнал дифференцирующего контура характеризуется правой частью уравнения, постоянная времени Т2 определяет методическую ошибку при дифференцировании.   Уравнение усилителя и цепи возбуждения генератора.  L3 и R3 – индуктивность и сопротивление обмотки возбуждающего генератора; Ri – внутреннее сопротивление лампы усилителя; I3 – ток в цепи обмотки возбуждающего генератора; q – коэффициент усиления. Уравнение принимает вид:  Где   . .Уравнение цепи якорей генератора и двигателя.  L4, R4 – индуктивность и сопротивление цепи якорей; I4 – ток в цепи якорей; ЕГ – ЭДС генератора; ЕД – противо ЭДС двигателя. Считая, что  и и   принимает вид: принимает вид: Где:  ; ;  ; ;  . .Единое уравнение системы имеет вид:          Получим:    |