1. Фигура и размеры Земли. Геоид, эллипсоид вращения, референцэллипсоид
 Скачать 3.3 Mb. Скачать 3.3 Mb.
|

|
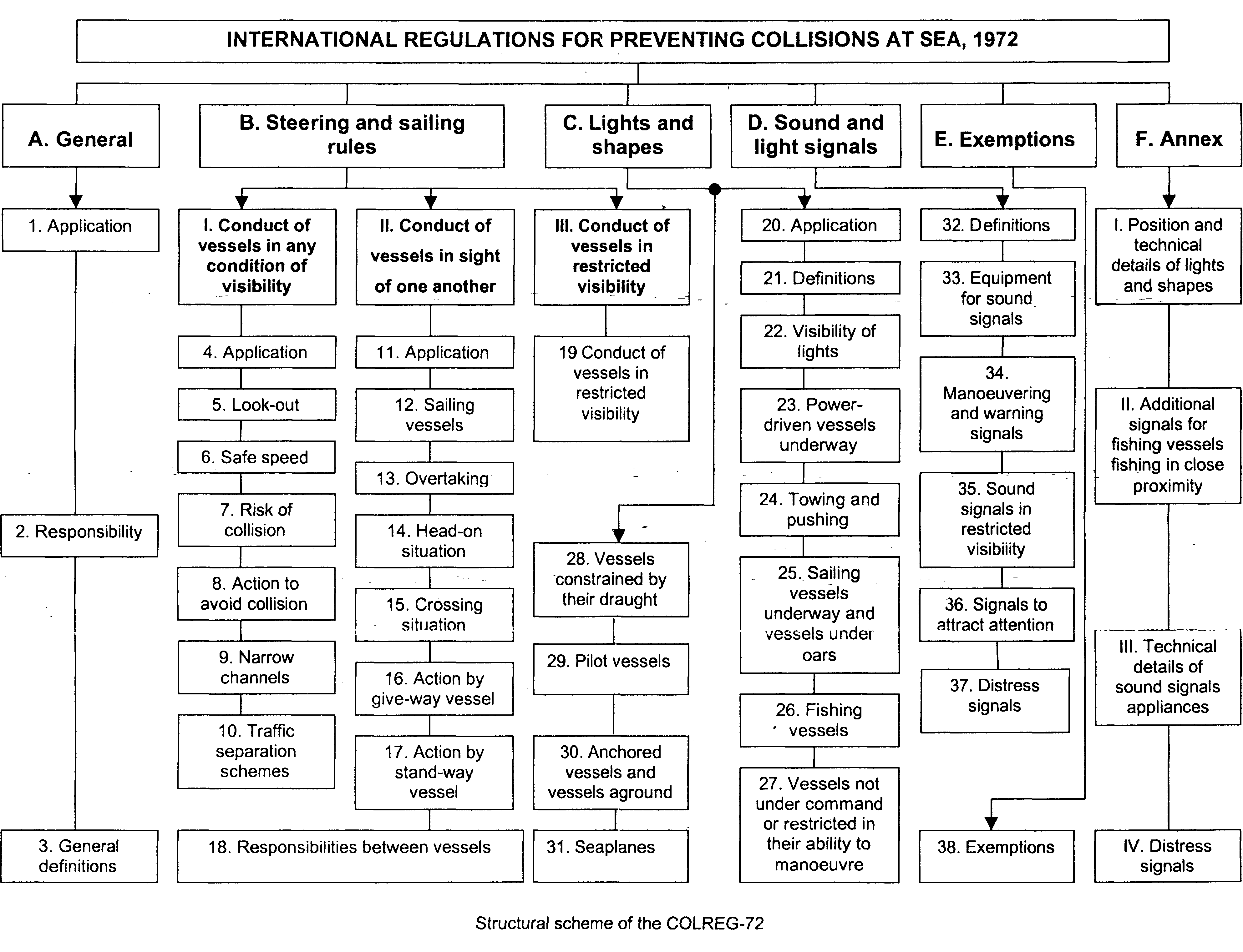
Погрешности гирокомпасов. В соответствии с международными стандартами, точность любого установленного на судне гирокомпаса должна отвечать следующим минимaльным требованиям. Установившаяся погрешность гирокомпаса - это paзность отсчетов истинного и установившегося курсов. Установившийся курс - среднее значение из 10 отсчетов, взятых один за другим через 20 мин после того, как гирокомпас пришел в меридиан. Считается, что гирокомпас пришел в меридиан, если разность между значениями любых двух отсчётов, взятых через 30 мин, не превышает ±0,7о. Установившаяся погрешность на любом курсе в шиpoтax φ Стабильность установившейся погрешности гирокомпаса от пуска к пуску должна быть в пределах 0,25 о sес φ. Стабильность установившейся погрешности основного прибора гирокомпаса должна быть в пределах ±1° sec φ в обычных условиях эксплуатации и вариацяях магнитного поля, которые может испытывать судно. Требуется также, чтробы в широтахφ включенный в соответствии с инструкцией гирокомпас пришел в меридиан за время не более 6 ч при бортовой и килевой качках с периодом колебаний от 6 до 15 с, амплитудой 5о и максимальном горизонтальном ускорении 0,22 м/с2; остаточная постоянная погрешность после ввода коррекции за скорость и курс при скорости 20 уз не должна превышать ±0,25 о sеc φ погрешность, вызванная быстрым изменением скорости, при начальной скорости 20 уз не должна превышать ±2о; погрешности, вызванные бортовой и килевой качкой с периодом колебаний от 6 до 15 с, амплитудами 20 о, 10 о и 5 о соответственно при максимальном горизонтальном ускорении не превышающем 1 м/с2, и рысканием судна должны быть не более 1 о sеc φ Максимальное расхождение в отчетах между основным прибором гирокомпаса и репитерами в рабочем состоянии не должно превышать ±0,5о. По своему характеру погрешности гирокомпаса принято делить на методические и инструментальные. Основными методическими погрешностями являются скоростная и инерционная. Скоростной погрешностью гирокомпаса называется постоянное в данной широте азимутальное отклонение оси гирокомпаса от истинного меридиана, происходящее вследствие движения судна с постоянной скоростью на постоянном курсе. Скоростная погрешность имеет полукруговой характер: для курсов северной половины горизонта она отрицательна, южной — положительна. В большинстве конструкций гирокомпасов она исключается автоматическими или полуавтоматическими корректорами. В некоторых конструкциях скоростная погрешность исключается только из показаний принимающих. Инерционные погрешности гирокомпаса вызываются возмущающими моментами сил инерции, возникающими при ускоренном движении судна. При появлении моментов этих сил ось гирокомпаса выходит из своего положения равновесия и совершает прецессионное движение со скоростью, зависящей от значения момента силы инерции. Инерционная девиация проявляется в форме затухающих колебаний после окончания маневра судна (курсом и/или скоростью). Образующаяся в результате маневра переменная погрешность называется инерционной погрешностью гирокомпаса. Она свойственна большинству современных гирокомпасов независимо от их конструкции. Различают инерционную погрешность с выключенным на время маневра успокоителем и инерционную погрешность с включенным успокоителем. Первую иногда называют баллистической погрешностью первого рода, вторую (в частном случае выполнения условия апериодических переходов) — баллистической погрешностью второго рода, или погрешностью ускорения-затухания. Наибольшее значение инерционная погрешность первого рода имеет в момент окончания маневра. Инерционная погрешность второго рода достигает наибольшей величины приблизительно через 20—25 мин после окончания маневра. На практике в условиях часто повторяющихся маневров какие-либо расчеты по определению инерционных погрешностей производить нецелесообразно. Однако судоводитель должен критически оценивать их возможную величину и характер изменения. Для этого необходимо учитывать следующее: инерционные погрешности носят гироскопический характер, т. е. возникают не сразу после появления инерционных возмущений и исчезают не сразу после их прекращения; изменение инерционных погрешностей во времени после прекращения действия возмущающих факторов происходит по законам собственных колебаний ГК, т. е. тем же периодом и фактором затухания; для транспортных судов величина инерционной погрешности в средних широтах после однократных маневров обычно не превышает 2—3°; показания гирокомпаса следует считать ошибочными в течение 40—50 мин после окончания маневра. В особо сложных условиях (при плавании в высоких широтах и на больших скоростях) инерционная погрешность может сохраняться в течение 1,5 ч после маневрирования; существенные инерционные погрешности появляются при полуциркуляции судна с курса 0° или 180°, а также при зигзагообразном маневрировании на четвертных генеральных курсах; при отсутствии выключателя затухания инерционная погрешность гирокомпаса принципиально не может быть устранена; выключение успокоителя колебаний гирокомпасов с нерегулируемым периодом целесообразно в широтах меньше расчетной (для отечественных конструкций меньше 60°); при пеленговании ориентиров с помощью гирокомпаса инерционная погрешность должна рассматриваться как систематическая (повторяющаяся) ошибка, если срок наблюдений значительно меньше периода собственных колебаний гирокомпаса; при счислении пути по гирокомпасу инерционная погрешность должна рассматриваться как случайная ошибка курсоуказания; при сложном маневрировании (плавании по извилистым фарватерам, во льдах и т. д.) возможно наложение инерционных погрешностей или накопление их до существенного значения, зависящего от широты плавания. В широтах 75—80° это значение может составлять ±10—15° для обычных неапериодических компасов. Инструментальные погрешности гирокомпаса с жидкостным подвесом ЧЭ складываются из инструментальных погрешностей основного прибора, следящей системы, корректирующих устройств, дистанционной передачи и принимающих приборов. Инструментальная погрешность основного прибора современных гирокомпасов обычно не превышает ±0,3°. Погрешность, вносимая следящей системой, практически может рассматриваться как случайная, поскольку она зависит от многих, трудно учитываемых факторов. В гирокомпасах с косвенным управлением основными источниками инструментальных погрешностей основного прибора являются дефекты следящих систем и устройства управления гироскопом. Одногироскопные гирокомпасы с торсионным подвесом могут иметь специфическую установившуюся погрешность, пропорциональную статической ошибке следящей системы. В реальных условиях плавания предельная величина случайной погрешности, которая может быть внесена следящей системой, не превышает ±1,0°. Погрешность, вносимая корректором, складывается из случайной погрешности, вызываемой люфтами и несоответствием геометрических размеров передач, и систематических погрешностей за счет неточного ввода истинной скорости и широты. Случайная погрешность корректора обычно оценивается предельными значениями ±(0,2-0,3)о. Систематическая погрешность за счёт неточного ввода истинной скорости, что может иметь место при неизвестном течении или неизвестной поправке лага, обычно невелика. Систематическая погрешность за счёт неточного ввода широты может достигать существенного значения. Для ее уменьшения при плавании в высоких широтах следует производить установку корректора по широте через каждый градус изменения широты или менее. Погрешность за счет дистанционных передач гирокомпаса обычно рассматривается как случайная. Ее предельное значение не превышает ±0,2 о в статическом режиме, но может достигать нескольких градусов в динамическом режиме, что следует иметь в виду при пеленговании объектов на циркуляция или после резкого изменения курса. Погрешности принимающих приборов могут быть разделены на систематические и случайные. Систематические обычно не превышают ±0,2 о (без учета погрешности за счет неточной установки пелоруса). Предельное значение случайных погрешностей имеет такой же порядок. К инструментальным погрешностям двухгироскопных компасов может быть отнесена и наблюдаемая на качке четвертная погрешность (у одногироскопных гирокомпасов с гидравлическим маятником ее следует рассматривать как методическую). Причиной этой погрешности является перемещение ЦТ чувствительного элемента на качке за счет изменения уровня имеющихся внутри него жидких масс, главным образом уровня масла в успокоителе колебаний. Величина этой погрешности зависит от конструкции успокоителя и для отечественных гирокомпасов типа «Курс» не превышает ±0,5 о (при отсутствии собственного движения судна). Поправки и точность показаний гирокомпаса. Совокупность перечисленных выше погрешностей образует суммарную погрешность гирокомпаса, подразделяемую на систематическую и случайную составляющие. На практике такое разделение не имеет большого значения, поскольку, как правило, общая поправка определяется при однократных наблюдениях или в течение слишком коротких промежутков времени, чтобы можно было произнести эффективную обработку измерений. Однако следует иметь в виду, что за счет случайных и переменных систематических ошибок значение общей поправки гирокомпаса в какой либо момент времени может существенно отличаться от значения, выведенного при последних наблюдениях. По этой причине, в частности, при пеленговании объектов в условиях длительного маневрирования или вскоре после окончания маневра (например, после выхода из порта), не следует принимать во внимание общую поправку, определенную до производства маневра. С другой стороны, изменение общей поправки в течение некоторого времени после маневрирования не следует считать признаком неисправной работы гирокомпаса. Иногда допускается ошибка, когда общая поправка гирокомпаса определяется на полном ходу с введенным в корректор значением скорости, а затем этой поправкой пользуются на малом ходу, среднем или на стоянке (например, на якоре) без ввода нового значения скорости в корректор. Другая ошибка возникает в тех случаях, когда общая поправка определяется на стоянке, но с установленным на корректоре значением скорости, при этом ошибочно предполагается, что на ходу поправка компаса будет правильной. Во всех случаях следует руководствоваться следующим правилом: введенная в корректор скорость должна всегда соответствовать действительной скорости судна. Общая поправка гирокомпаса определяется одним из принятых в навигации и мореходной астрономии методов, а также с помощью радиотехнических средств. Величина средней квадратической погрешности общей поправки гирокомпаса составляет: по створам ±0,2°, пo пеленгам береговых ориентиров ±0,4°, по небесным светилам ±0,4°. К paдиотехническим способам следует прибегать только в тех случаях, когда вследствие плохой или ограниченной видимости другие способы определения поправки недоступны. Особенно ненадежны определения поправки гирокомпаса с использованием ненаправленных радиомаяков, находящихся за пределами оптической видимости. Величина и характер изменения общей поправки гирокомпаса являются критерием точности его показаний. Точность гирокомпаса в соостетствии с природой его погрешностей принять оценивать для конкретных целей плавания: на неподвижном основании (на швартовах); при плавании прямыми курсами с постоянной скоростью; при маневрировании судна; при качке судна. 43. Пособия «Огни и знаки» (Admiralty list of lights and fog signals), содержание, использование, правила корректуры. Руководства «Огни и знаки» составляются на советские воды и содержат сведения о всех СНО, за исключением всех (описание буев и вех ,следует искать в соответствующих лоциях). На иностранные воды составляются руководства под названием «Огни», содержащие сведения только о светящих СНО. Под термином «огонь» подразумеваются маяки, аэромаяки, светящие знаки, плавучие огни, буи-маяки. «Знак» -не светящие знаки и буи . Руководство «Огни и знаки» составляются по схеме: -вводные документы (обращение к мореплавателям, таблицу «Характер огней СНО», перечень условных обозначений, лист для учета корректуры); -описание СНО (приводится в виде таблицы, в которой помещены характеристики СНО, положение на местности координаты, годы учреждения и модернизации, цвет и характер огня, силу света, дальность видимости); -алфавитный указатель огней и знаков; -перечень звукосигнальных средств. Тома «Адмиралтейского Списка Огней и Туманных Сигналов» и «Адмиралтейского Списка Радиосигналов» поддерживаются на уровне современности при помощи Извещений Мореплавателям и путём их ежегодного переиздания. Некоторые из томов этих пособий переиздаются реже. В Адмиралтейских изданиях жирным шрифтом обозначаются маяки с дальностью видимости более15 миль. Курсивом – плавучие маяки. Мелки курсив – буи (крупные, более 8 миль). Ответственность: А – Ministry of defence (NAVY); AM – Ministry of defence (AIR); WD – Army; List of lights – выходит каждый год 1-го января. 44. Проседание судна на мелководье. Влияние мелководья на поворотливость судна и его тормозной путь. Влияние мелководья на управляемость. Мелководье оказывает существенное влияние на маневренные характеристики судна: при неизменной мощности главного двигателя скорость уменьшается, диаметр циркуляции и тормозной путь увеличиваются, посадка изменяется, проседание корпуса возрастает. Влияние мелководья начинает проявляться при глубине (в м), определяемой по формуле Павленко: где Т—средняя осадка неподвижного судна, м; V—скорость судна, м/с; g — ускорение свободного падения, м/с2. Наиболее ощутимо мелководье сказывается при отношении (Н/Т) Степень влияния мелководья зависит от скорости судна V, выраженной в относительном ее значении в виде числа Фруда, рассчитываемого по глубине: При Frн<0,3 влияние мелководья на скорость хода и проседание корпуса практически несущественно при любых значениях Н/Т. Однако трудности, связанные с управлением судном на таких скоростях, далеко не всегда позволяют двигаться на мелководье, не превышая при этом значение 0,3 числа Фруда. Волнообразование, изменение посадки и другие явления на мелководье резко возрастают при Frн Угол раствора волн, образуемых судном, постепенно увеличивается и с наступлением «критической» скорости составляет 90° по отношению к ДП судна. Обычные водоизмещающие суда эксплуатируют в докритической зоне; их скорость не должна приближаться к критической. Попытки увеличить скорость за счет небольшого резерва мощности главного двигателя положительного эффекта при приближении к Vкр не дают и приводят лишь к избыточному расходу топлива, увеличению проседания и ухудшению устойчивости на курсе. Потерю скорости (в %) на мелководье при плавании в зоне докритических скоростей можно приближенно рассчитать по эмпирической формуле Демина: где Н — глубина, м; Т—средняя осадка, м; g -— ускорение свободного падения, м/с2. Значение ДУ должно получаться со знаком «минус», если же получается положительное значение, то потерю скорости считают равной нулю. Мелководье существенно влияет на маневренные характеристики судов. Радиус циркуляции с уменьшением глубины возрастает, и при Несмотря на повышение гидродинамического сопротивления движению на мелководье, рост присоединенных масс воды увеличивает силы инерции судна. Поэтому на мелководье тормозные пути судна как при пассивном, так и при активном торможении увеличиваются. Этому способствует также ухудшение пропульсивных качеств гребного винта при работе на задний ход в условиях мелководья. При движении судна в районе малых глубин с неровным рельефом дна вытесняемая носовой частью вода встречает препятствие со стороны повышенного участка. Носовая волна со стороны отмели становится выше и увеличивает воздействие на нос в сторону, противоположную отмели. В результате возникает явление «отталкивания» носовой части от отмели. В районе кормы возникает «притягивание» судна в сторону более мелководного участка. Такое действие сил обусловлено уменьшением поступления потока воды к гребному винту со стороны отмели и образовавшимся падением давления перед винтом с этого борта. При работе винта на задний ход разрежение между кормой и отмелью исчезает, силы «притягивания» кормы не действуют. Эффективность работы руля также сводится к нулю. Если в это время судно ещё сохраняет достаточный ход вперёд, то под действием боковых сил винта нос начинает отклонятся вправо. Однако при маневрировании в мелководных районах, когда у судна очень малый ход вперед или же движение вперед вообще отсутствует, влияние гидродинамических сил может иметь преобладающее значение. Если участок отмели находится с левого борта, поток воды от ВФШ правого шага создает между отмелью и корпусом повышенное давление, что вызывает уклонение кормы вправо вопреки обычной тенденции уклоняться влево. Все перечисленные обстоятельства осложняют маневрирование судов в районах с малыми глубинами, и если их не учитывать, то судно может оказаться в затруднительном положении. Проседание на мелководье. При движении судна вокруг него образуется гидродинамическое поле с разными значениями давления в отдельных его частях. Понижение давления под днищем вызывает проседание судна, что создает угрозу касания грунта. Метод Рёмиша позволяет с достаточной для практики точностью определить проседание судов при плавании на мелководье и в каналах. Он учитывает основные параметры судна и может быть применен для судов разных типов и размеров. Увеличение осадки (в м) на мелководье отдельно для носа и кормы рассчитывается по формуле: где Н—глубина воды, м; Т—осадка носа или кормы, м; Cv — коэффициент, зависящий от скорости хода; Сδ — коэффициент, зависящий от формы корпуса. Коэффициент Cv рассчитывается по формуле:  , ,где V—скорость судна, м'с; Vкр'—критическая скорость для мелководья, м/с; получается в данном методе из выражения: Коэффициент Cδ отдельно для носа и кормы определяется по следующим выражениям:  . .Как видно из формулы, при Сδн>1 проседание носа больше кормы, а при Сδн>1 – больше кормы. Из нее же можно сделать вывод, что у судов с полными обводами и малым отношением L/B (например, у крупнотоннажных танкеров) больше проседает нос, а у судов с острыми образованиями больше проседает корма. Если n На основе работ Ремиша С. Деминым составлены диаграммы для определения проседания судов при плавании в каналах и на мелководье. Диаграммы позволяют найти увеличение осадки судна отдельно для носа и кормы. Диаграмма 1 служит для получения критической скорости Vкр', которая определяется для канала по глубине Н и отношению n, а для мелководья — по глубине Н, отношению L/B и осадке Т носа или кормы (берется осадка той оконечности судна, для которой определяется проседание). Дополнительные пояснения могут потребоваться при пользовании правой частью диаграммы (мелководье, n>2), в которой применена «направляющая прямая» (НП), изображенная пунктиром. Порядок получения Vкр' на мелководье следующий: от Н (вертикальная ось) по горизонтали вправо до кривой L/B; от L/B по вертикали (вверх или вниз) до НП; от НП по горизонтали (вправо или влево) до отрезка прямой, соответствующей Т; от Т вниз до шкалы Vкр'. Диаграмма 2 служит для определения относительного уменьшения запаса воды под килем T по критической скорости Vкр', действительной скорости судна V и отношению глубины к осадке Н/Т. Если определяют проседание носовой оконечности, то из диаграммы 3 (выбирают поправочный коэффициент для носа СВ по коэффициенту полноты водоизмещения d и отношению L/В. Проседание в метрах отдельно для кормы и носа рассчитывают по формулам: 45. Грузовой план судна. Чертёж и общие требования. Особенности грузовых планов различных типов судов. Грузовым планом называется графическое изображение размещения каждой партии груза в судовых грузовых помещениях на данный рейс. Различают предварительный и исполнительный грузовые планы. Предварительный грузовой план составляет в нескольких экземплярах порт а утверждает капитан судна. В случае перевозки опасных, легко воспламеняющихся и других подобных грузов предварительный пожарный план согласовывают с пожарной инспекцией порта, которая его визирует. Предварительный грузовой план составляют заблаговременно до подхода судна под грузовые операции, с расчетом концентрации партий груза в определенном месте на причале или складе. Грузовой план, подписанный капитаном, служит основанием для размещения груза на судне. Одновременно с началом погрузки приступают к составлению исполнительного грузового плана, отражающего фактическое размещение груза на судне. Этот план составляет грузовой помощник капитана судна. При перевозках однородных грузов или навалочных предварительный грузовой план составляет администрация судна совместно с представителями порта. Однополосный грузовой план-это схематическое изображение разреза судна по диаметральной плоскости на котором показано размещение грузов по трюмам, твиндекам и на палубе. Такой план составляют при погрузке небольшого количества партий груза. Многополосный грузовой план составляют при большом количестве коносаментных партий, когда необходимо знать расположение грузов в горизонтальной плоскости по трюмам, твиндекам и на верхней палубе. Правильное построение грузового плана складывается из: Полного использования грузовместимости и грузоподъемности и достижения максимума доходов; Распределения переменной нагрузке между грузовыми помещениями; Распределение (комплектации) грузов в каждом грузовом помещении; Проверки грузового плана на предмет обеспечения надлежащих остойчивости судна, дифферента и крена; Составления регулировочных расчетов. 46. Управляемость и рулевые устройства. 47. Правила МППСС-72. Назначение, структура правил, применение. МППСС-72 являются основным документом, определяющим действия судоводителей при расхождении судов. Эти Правила предъявляют также целый ряд технических требований к оборудованию судов необходимыми для безопасного расхождения сигнальными средствами. Правила для предупреждения столкновений судов решают следующие основные задачи:
 48. Авторулевые, принципы работы, режимы работы, типовые эксплуатационные регулировки и установки. Все суда морского транспортного флота в настоящее время оборудуются системами автоматического управления (САУ) курсом судна. Основным элементом САУ является прибор управления (авторулевой). Настройка авторулевого в процессе эксплуатации осуществляется подбором коэффициента обратной связи (КОС), коэффициента тахогенератора (Ктг) и начальной чувствительности. При правильной настройке авторулевой обеспечивает снижение потерь ходового времени до 3% за счет более точного удержания судна на заданном курсе и уменьшения тормозящего действия корпуса и руля. Углы перекладки руля при автоматическом управлении на 20-30% меньше, чем при ручном. В последние годы появился новый тип авторулевого – адаптивный, имеющий автоматическую настройку параметров схемы при изменении внешних условий плавания или скорости судна. Адаптивные авторулевые используются главным образом на крупнотоннажных судах для улучшения их управляемости, особенно при движении с малой скоростью, на мелководье и в стесненных условиях плавания. В настоящее время типы АБГ,АР,АТР и “Аист”,а также иностранного производства АЕГ(ФРГ),РФТ(ГДР),”Аркас”(Дания),”Декка”(Великобритания) и др. В соответствии с международными требованиями система автоматического управления курсом судна должна обеспечивать: Переход с ручного управления на автоматическое и наоборот с помощью не более чем двух органов управления за время не более – 3с. при любом положении пера руля; Переход с автоматического на ручное управление при любых неисправностях в системе автоматического управления; Фильтрацию сигналов управления для уменьшения числа кладок руля от рысканья при волнении. При переходе с ручного управления на автоматическое авторулевой должен автоматически вывести судно на заданный курс. При выборе параметров настройки авторулевого следует учитывать конкретные условия плавания. Исследования и опыт эксплуатации показали, что настройку авторулевого следует менять в случаях: Изменения загрузки судна (в балласте, в полном грузу), изменения скорости (полный, средний, малый ход), изменения погоды. При этом необходимо руководствоваться следующими общими положениями: подбирать параметры настройки авторулевого необходимо так, чтобы судно удерживалось на заданном курсе при минимальных углах перекладки руля; не следует стремиться уменьшать значения рысканья судна на волнении путем повышения чувствительности авторулевого, т.к. при этом резко возрастает количество перекладок руля. При большом количестве перекладок руля (более 400 в час) точность удержания судна на курсе не повышается. Настройка авторулевых АБР,АР,АТР,”АИСТ” и “ПЕЧОРА”. Одним из рекомендуемых параметров является КОС. Выбор величины КОС для каждого конкретного судна производится во время приема - сдаточных испытаний авторулевого. Как показал опыт эксплуатации, для судов морского транспортного флота величина КОС устанавливается в пределах от 0,2 до 0,8. При увеличении загрузки судна КОС следует уменьшать. Вторым регулирующим параметром является коэффициент Ктг метала тахогенератора (или электронного дифференцирующего устройства). Для повышения чувствительности авторулевого в тихую погоду Ктг следует увеличивать, поворачивая рукоятку “Сигнал тахогенератора” в сторону “Больше”; при этом точность удержания судна на курсе повышается. При ветре и волнении моря Ктг следует уменьшать, чтобы не перегружать рулевую машину. Если при введении градусной поправки в режиме “автомат” судно медленно выходит но новый заданный курс, сигнал тахогенератора следует уменьшить. При этом переход судном линии нового заданного значения не должен превышать значение градусной поправки более чем на 10%. При необходимости изменить курс судна в режиме “Автомат” на угол более 30 следует медленно поворачивать штурвал следящего управления так, чтобы угол рассогласования между неподвижным индексом и курсовой чертой не превышал 10-15. Регулятор “Грубо-точно” меняет коэффициент усиления всей системы. Рукоятку этого регулятора устанавливают в положение “Грубо” при свежей погоде когда, уменьшение чувствительности регулятором тахогенератора оказывается недостаточным. В соответствии с требованиями конвенции “СОЛАС-74” необходимо не более чем за 12ч до отхода судна в рейс производить проверку работы как основных, так и аварийных каналов управления рулем. При этом должны быть проверены основной и вспомогательный рулевые приводы, система дистанционного управления рулевым приводом, посты управления рулем на рулевом мостике, аварийное энергопитание, указатели положения руля, аварийная сигнализация, работа автоматических ограничителей угла перекладки руля а также работа средств связи мостика с румпельным отделением. 49. Навигационное планирование рейса. Общие принципы и требования в соответствии с Кодексом ПДНВ. Общие требования. Предстоящий рейс должен планироваться заранее, принимаемая во внимание вся информация и любой проложенный курс проверить до начала рейса. Старший механик должен определить с капитаном подробности рейса, проверить потребности судна в топливе, воде, смазке, запчастях, инструментах... Планирование до начала каждого рейса. До начала рейса капитан обеспечивает планировку от порта отхода до первого порта на соответствующих картах и навигационных пособиях для рейса, содержащих полную, точную и откорректированную информацию в отношении предсказуемых ограничений и опасностей принимаемых к данному рейсу. Проверка и прокладка планируемого пути. После завершения проверки пути, запланированный путь должен быть проложен на соответствующих картах и быть постоянно доступным для ВПКМ, который, до того как лечь на соответствующий курс обязан его проверить. Отклонение от запланированного пути. Если в ходе рейса принято решение об изменении следующего порта захода или если необходимо существенно отклонится от запланированного пути по другим причинам, изменённый путь должен прорабатываться заранее до того, как он будет существенно изменён. Получив рейсовое задание – судоводитель приступает к разработке навигационного плана, выполнения полученного задания. Первый этап – установление районов через который проходит маршрут, подбор карт, подбор руководств и пособий, выбор наилучшего пути следования во время выполнения рейса. Второй этап – общее знакомство с условиями плавания в намеченных районах и назначение маршрута перехода. Третий этап - представляет собой детальное изучение намеченного маршрута в навигационном, гидрографическом и гидрометеорологическом отношениях , выбор наивыгоднейшего пути и его предварительную прокладку. Источники для планирования и оценки предстоящего рейса. 1.Каталог Карт и книг (Catalogue of Admiralty Chart and Publications NP-131 (год выпуска)). 2.Навигационные карты (Chart). 3.Океанские пути мира (Ocean Passage for the World). 4.Маршрутные или лоцманские карты (Routening, Pilot Chart). 5.Лоции (Pilot Book, Sailing Directions). 6.Справочник по маякам (Admiraltly List of Lights and Fog Signals). 7.Таблицы приливов (Tide Tables). 8.Атлас приливных течений (Tidal Stream Atlasses). 9.Извещение мореплавателям (Notices to Mariners). 10.Информация об установленных путях (Ship Routening). 11.Информация о радиосигналах (Radio Signal Information). 12. Информация о климатических условиях (Climate Information). 13. Карты – схемы ограничений по грузовой марке (Load –lines Charts). 14. Таблиц расстояний (Distance Tables). 15. Электронные системы навигационной информации (Electronic Navigation Systems Handbook). 16.Радионавигационные предупреждения и сообщений (Radio and Local Warnings). 17.Источники судовладельцев и другая неопубликованная информация (Owners and Other Information). 18.Осадки судна (Draft and Stability of Ship). 19.Личного опыта (Personal Experience). 20.Руководство для моряков и другие пособия (The Marines Handbook NP100). 50. Информация об остойчивости и прочности судна. Назначение, содержание, использование. Информация об остойчивости. Каждое судно Минморфлота валовой вместимостью более 20 рег. т снабжается Информацией об остойчивости и прочности, содержащей сведения об остойчивости в нескольких типовых случаях загрузки судна и данные для расчетов в нетиповых случаях. Формы бланков для таких расчетов приводятся в Информации. С полученными на основании расчетов значениями и моментом Мz относительно продольной оси входят в график предельных контрольных моментов. Если точка, соответствующая полученным и Мz, располагается на графике ниже предельной кривой — остойчивость судна соответствует требованиям Регистра, если выше — не соответствует. С этого же графика можно снять допустимое значение h. Следует помнить, что с целью получения более удобного масштаба величин М, график контрольных моментов построен для моментов относительно некоторой условной плоскости расчета, возвышающейся над килем на величину zo. Значение zo дается в Информации. Поскольку расчет Мz на судне ведут от киля, входить в график контрольных моментов надо со значением Мz, уменьшенным на величину zo. Д 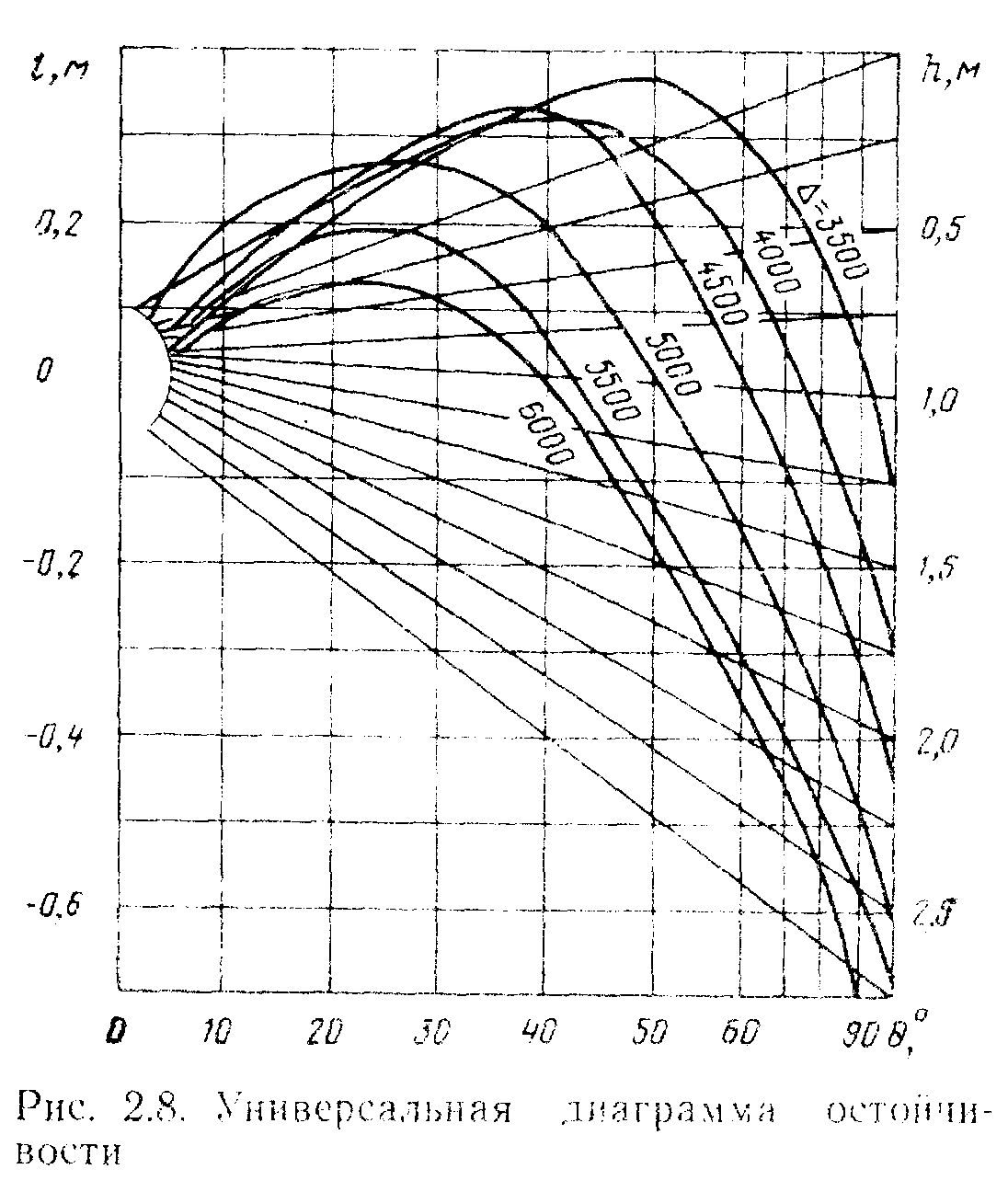 ля полного суждения об остойчивости судна следует построить диаграмму статической остойчивости для конкретного случая загрузки. Сняв с диаграммы предельных моментов значение h, соответствующее имеющемуся значению Mz, и зная величину D, на универсальной диаграмме статической остойчивости, приводимой в Информации, находят луч h и кривую D. Расстояние между ними по вертикали будет равно значению l для соответствующего угла Q. Последовательно снимая l для углов Q = 10o, 20o и т, д., строят диаграмму статической остойчивости (pиc. 2.8) ля полного суждения об остойчивости судна следует построить диаграмму статической остойчивости для конкретного случая загрузки. Сняв с диаграммы предельных моментов значение h, соответствующее имеющемуся значению Mz, и зная величину D, на универсальной диаграмме статической остойчивости, приводимой в Информации, находят луч h и кривую D. Расстояние между ними по вертикали будет равно значению l для соответствующего угла Q. Последовательно снимая l для углов Q = 10o, 20o и т, д., строят диаграмму статической остойчивости (pиc. 2.8)Иногда вместо D на универсальной диаграмме наносят кривые дедвейта. Требования к остойчивости судна изложены в 4-й части “Остойчивости” правил классификации и постройки морских судов Регистра(7). Согласно требований этих правил остойчивость судна проверяется по критерию погоды К; регламентируются также величина исправленной начальной поперечной метацентрической высоты и числовые значения параметров диаграммы статической остойчивости судна. Нормируется также аварийная остойчивость. Остойчивость сухогрузного судна должна быть дополнительно проверена по критерию ускорения. Остойчивость судна проверяется по пяти параметрам, регламентируемым правилами регистра. Так, остойчивость судна считается достаточной если: А) критерий погоды К 1; К =Мопр / Мкр Б) максимальное плече диаграммы статической остойчивости lmax 0,25м для судов с L 80м и lmax 0,20 для судов с L 105м; В) угол максимума диаграммы статической остойчивости Qm 30; Г) угол заката диаграммы статической остойчивости Qзак 60; Д) начальная метацентрическая высота положительна, т.е. h 0. Для сухогрузного судна проверяется его остойчивость по критерию ускорения. Остойчивость по критерию ускорения К* считается приемлемой, если в рассматриваемом состоянии погрузки расчетное ускорение aрасч (в долях)не привышает допустимого значения, т.е. соблюдается условие: Для судов, перевозящих сыпучие грузы, и некоторых других типов судов (пассажирские, лесовозы, буксиры и т.д.) необходимо проверить выполнение дополнительных требований, изложенных в разделе 3 части 4 правил. Требования к прочности корпуса судов содержаться в части 3 “корпус” правил. Все современные суда длинной 150м должны быть снабжены одобренными регистром средствами контроля загрузки (инструкции по загрузке, приборы для контроля и т.п.), позволяющими легко и быстро установить,что изгибающий момент и перерезывающая сила на тихой воде в каждом конкретном случае загрузки судна не превышают допустимых значений. (Если│Мизг │ Мдоп,(где Мизг = Мп + Мdv + Мсп, где Мп – составляющая изгибающего момента на мидель от веса судна порожнем. Мdw – от сил дедвейта; Мсп – от сил поддержания на тихой воде), Общая продольная прочность корпуса судна считается обеспеченной и соответствующий грузовой план с точки зрения прочности удовлетворительным. Если│ Мизг │ Мдоп, общая прочность корпуса считается не обеспеченной, в связи с чем необходимо принять меры для уменьшения абсолютной величины изгибающего момента. Абсолютную величину изгибающего момента в миделевом сечении при перегибе – можно уменьшить перемещением грузов от оконечности к миделю или приемом балласта в середине цистерны, а припрогибе – перемещении грузов от миделям к оконечностям или приемом балласта в носовые и кормовые цистерны. 51. Оценка времени и дистанции кратчайшего сближения с судами, следующими пересекающимися и встречными курсами, или обгоняющими. Глазомерная оценка ситуации осуществляется после обнаружения эхо-сигнала цели (объекта) на экране РЛС и не прекращается до полного расхождения. Глазомерная оценка ситуации позволяет учитывать при ведении радиолокационной прокладки все опасные и потенциально опасные цели. Опасной целью принято считать судно (объект), в соответствии с установленными критериями опасности вызывает необходимость выполнения манёвра расхождения. Под потенциально опасной целью подразумевается судно, перемещение эхо-сигнала которого в соответствии с установленными критериями опасности в данный момент времени не вызывает необходимости выполнения манёвра расхождения., однако без выполнения которого невозможно будет обойтись при дальнейшем сближении, при неблагоприятном манёвре этого судна или после выполнения манёвра нашим судном для расхождения с опасными целями. Степень опасности каждой наблюдаемой цели на экране РЛС определяют Dкр и tкр, глазомерно оцениваемые по следу свечения и скорости движения. Степень опасности зависит также от величины изменения ЛОД цели в случае манёвра нашего судна. При перемещении эхо-сигнала параллельно линии нашего курса более опасной будет цель, эхо-сигнал которой пройдёт по той стороне от начала развёртки, в которую возможен отворот нашего судна. При перемещении эхо-сигналов непараллельно линии нашего курса степень опасности цели будет зависеть также и от возможного изменения скорости нашего судна. Скорость сближения с целью помогает правильно оценить развитие ситуации во времени с тем, чтобы заблаговременно предпринять надлежащие действия. 52. Планирование перехода (Voyage plan). Этапы планирования, предварительные построения на морских картах при планировании (подъём карты). Планирование перехода состоит из 4-х этапов: -оценка предстоящего перехода; -планирование перехода; -исполнение плана; -контроль за исполнением плана и анализ его выполнения; Последовательность выполнения планирования. 1.Проверяют откорректированы ли все карты. 2.Ждут текущие навигационные предупреждения и прогнозы. 3.Связываются с лоцманом(Pilots Plan). 4.Помещают на карту основные судовые параметры и данные по рейсу. 5.Отмечают минимальную, необходимую глубину. 6. Прокладывают линии пути. 7.Вычисляют ETA для каждой точки. 8.Определяют минимальную глубину на каждом участке перехода. 9.Вычисляем ЕТА для критической глубины и приливов. 10.Рассчитываем «Приливные окна» в точках критической глубины. 11.Обозначают элементы течения. 12.Наносят на карты границы безопасного плавания. 13.Обозначаем границы безопасного плавания подовранными линиями параллельной индексации. 14.Обозначают точки предупреждений(Alerts). -изменение границы безопасного района; -смены ориентиров, переходов по разнице РНС. 15.Точки перекладки руля. 16.Другие предупреждения(Alerts). -согласование GPS, места перехода на другую карту; -вызов лоцмана изменение скорости. 17.Алтернативные пути. 18.Точку последнего, возможного возврата. 19.Места якорных стоянок (случаев ЧП). 20.Увязывают все Alerts с путевыми замечаниями расстояниями. 21.Составяют таблицы плана перехода и заполняют лоцманскую карту. 22.Капитан обсуждает план перехода с помощником и утверждают его. 53. Международные и национальные нормативные документы по перевозке наливных грузов. Статистика нормативной документации по перевозке грузов морем включает следующее:
А) Тарифы на перевозку. Прейскуранты.
А) Сборник основных проформ чартеров и коносаментов Б) Нормативные документы по коммерческой эксплуатации.
А) Общие и специальные правила перевозки грузов. Б) Правила перевозки наливных грузов Используются конвенции SOLAS и MARPOL. 54. Пособие «Океанские пути мира» (Ocean passages for the world), содержание, использование. Пособия «Ship’s routeing», «Guide to port entry». Руководство «Океанские пути мира » предназначено для выбора пути следования судов с механическим двигателем между наиболее важными портами мира в зависимости от времени года, гидрометеорологических условий и эксплуатационных качеств судна. Там, где это целесообразно, пути подразделяются на: -пути для судов со слабыми машинами (скорость хода до 10 узлов); -пути для судов с машинами средней мощностей (от 10 до 15 узлов). Суда с сильными машинами (скорость хода более 15 узлов) обычно следуют по кротчайшему пути между портами. Руководство не заменяет лоции и другие пособия по плаванию и не освобождает мореплавателей от их использования. Руководство состоит из трех отделов и восьми приложений–карт. Отдел №1 Гидрометеорологический обзор. Отдел№2 Пути судов. Отдел№3 Справочный отдел. Порядок использования. Пользуясь одной из карт, приведенных в приложении, намечаем наиболее подходящий путь и уточняем район плавания. По алфавитному указателю находим пункт отшествия и против пункта пришествия выбираем номер пути и страницу, где он описан. 55. Управление судами и составами в особых случаях. 56. Международные и национальные нормативные документы по перевозке навалочных грузов. 57. Система ограждения навигационных опасностей принятые МАМС. Система ограждения навигационных опасностей МАМС принята в 1980 г. на конференции Международной ассоциации служб (МАМС) Система предусматривает 5 типов знаков: 1) Латеральные знаки. Эти знаки (буи и вехи) выставляются по принципу ограждения сторон фарватера. Левой или правой стороной канала (фарватера) называется та сторона, которая находится соответственно слева или справа от судна, идущего по фарватеру с моря. На корпусе буев могут наноситься буквы или цифры, причём нумерация или обозначение буквами ведется со стороны моря. В регионе А для обозначения фарватера - красный слева (Европа, Австралия, Африка). В регионе В - зелёный слева (Америка, Япония, и пр.). Ограждение сторон фарватеров на левой стороне выставляются знаки, полностью окрашенные в красный цвет, топовая фигура - красный цилиндр; светящий буй имеет красный огонь (ПрЗс). На правой стороне выставляются знаки, полностью окрашенные в зелёный цвет, топовая фигура -зелёный конус вершиной вверх, светящий буй имеет зелёный огонь (ПрЗс). Обозначение мест разделения фарватеров: (знаки, указывающие основной, предпочтительный фарватер), основной фарватер справа - окраска знаков красная с широкой зеленой горизонтальной полоской, топовая фигура - красный цилиндр, огонь - красный проблесковый. Основной фарватер слева: окраска знаков - зелёная с широкой красной горизонтальной полосой, топовая фигура - зелёный конус, зелёный проблесковый. 2) Кардинальные знаки. Служат для ограждения отдельных лежащих опасностей, а также затонувших судов. Эти знаки обозначают сторону (по компасу), с которой судно должно обходить ограждаемую опасность. Северные буи: знаки имеют вверху чёрный цвет, снизу жёлтый, топовая фигура - два конуса, вершинами вверх, огонь - белый, частый. Восточные буи: знаки - чёрные, с широкой желтой горизонтальной полосой, топовая фигура - конусы основаниями вместе, огонь - белый, частый Ч Пр. (3) 10с. Южный буй: знаки - вверху жёлтый, внизу чёрные, топовая фигура – конусы вершинами вниз, огонь белый Ч Пр. (6). 15с. Западные буи: знаки - жёлтые с широкой чёрной горизонтальной полосой, огонь - белый Ч Пр. (9) 15с. 3) Знаки, ограждающие отдельные опасности незначительных размеров. Выставляются над опасностью и могут быть обойдены с любой стороны. Знаки окрашены в чёрный цвет с одной или более красными широкими горизонтальными полосами. Топовая фигура - два чёрных шара. Характер огня - белый Пр.(2) 5с. 4) Знаки, обозначающие начальные точки и ось фарватеры. Знаки окрашены в красные и белые вертикальные полосы. Топовая фигура - красный шар. Огонь - белый Пр. 6с 5) Знаки особенного специального назначения. Применяются для обозначения или ограждения специальных районов (свалка мусора, военные учения и др.), знаки окрашены в жёлтый цвет. Топовая фигура - косой крест жёлтого цвета. Огонь -жёлтый Пр.5с. 58. Поиск и спасение на море. Международные документы, регламентирующие поиск и спасение на море (MERSAR, IAMSAR). Международная конвенция по поиску и спасанию на море, 1979 – International Convention On Maritime Search And Rescue (SAR), 1979. Одобрена 27 апреля 1979 года, вступила в силу 22 июня 1985 года, принята Украиной 4 апреля 1993 года. Главная цель – улучшить сотрудничество между государствами и организациями, учавствующими в операциях по поиску и спасанию на море. О таком сотрудничистве говорит правило V/15 СОЛАС, призывающее правительства принять все меры по организации наблюдения берега и спасания людей, терпящих бедствие в море вблизи его берегов. На 7-ой сессии ИМО Резолюцией А.229(VII) было принято Руководство для торговых судов по поиску и спасанию (MERSAR). Технические требования изложениы в Приложении к Конвенции, которое состоит из 6 глав: глава 1 – Термины и определения; глава 2 – Организация; глава 3 – Сотрудничество; глава 4 – Подготовительные меропроиятия; глава 5 – Порядок проведения операций; глава 6 – Системы судовых сообщений. Государства-участники конвенции должны создать национальные спасательно-координационные центры (СКЦ) и при необходимости – подцентры, а также определить зоны ответственности. Поисково-спасательные зоны устанавливаются по соглашению с соседними государствами, которые не имеют отношения к границам между государствами. Каждое государство должно направить в ИМО информацию о национальной организации поиска и о морской поисково-спсательной службе с указанием всех национальных СКЦ, возможностей связи с ними, наличии спасательных средств, которыми они располагают. Государства-участники должны содействовать установлению соглашений по SAR между соседними государствами для координации спасательно-поисковых операций, проведения совместных учений. В главе 5 определяются три аварийных стадии: А). «стадия неопределёности» - отсутствие оговорённой информации с судна в должные сроки; Б). «стадия тревоги» - отсутствие связи с судном и информации после «стадии неопределёности»; В). «стадия бедствия» - получение информации об угрозе серьёзной опасности судну или лицу, необходимости определённой помощи или ситуация, когда после стадии тревоги все попытки установления связи с судном безуспешны и отсутствует информация о судне ото всех возможных источников. Всем участикам конвенции рекомендуется устанавливать системы судовых сообщений, которые обеспечат полную информацию о движении судов и дадут возможность сократить время между моментом потери связи с судном и началом поисково-спасательных операций. Это также может помочь в определении судна, способного оказать немедленную помощь, включая медицинскую. 59. Международные и национальные нормативные документы по перевозке опасных грузов. 60. Кодекс ПДMНВ о принятии ходовой навигационной вахты. Наблюдение на ходовой навигационной вахте. |