Лекции Электропривод ГМиММ. 1. Роль электропривода в современных машинных технологиях
 Скачать 3.83 Mb. Скачать 3.83 Mb.
|

|
При разгоне двигателя скольжение уменьшается, э.д.с. ротора, частота тока ротора, индуктивное сопротивление ротора пропорционально уменьшаются. Соответственно уменьшается величина полного тока ротора и статора, однако, вследствие повышения соsφ2 активная составляющая тока ротора растет и возрастает момент двигателя. Когда скольжение двигателя станет меньше sк, то частота тока ротора уменьшится настолько, что индуктивное сопротивление станет уже меньше активного, и ток ротора будет практически активным (см.рис.3.6,б), момент двигателя будет пропорционален току ротора. Так, если номинальное скольжение двигателя sн = 2%, то по сравнению с пусковыми параметрами частота тока ротора уменьшится в 50 раз, соответственно уменьшится индуктивное сопротивление ротора. Поэтому, несмотря на то, что э.д.с. ротора также уменьшится в 50 раз, она будет достаточна для создания номинального тока ротора, обеспечивающего номинальный момент двигателя. Таким образом, своеобразие механической характеристики асинхронного двигателя определяется зависимостью индуктивного сопротивления ротора от скольжения. 3.3. Способы пуска АД 1. Пуск асинхронного двигателя с фазным ротором Исходя из изложенного, для пуска асинхронного двигателя с фазным ротором нужно принять меры для увеличения пускового момента и снижения пусковых токов. С этой целью в цепь ротора включают добавочное активное сопротивление. Как следует из формул (3.23, 3.25), введение добавочного активного сопротивления не изменяет максимального момента двигателя, а лишь изменяет величину критического скольжения где R2d – приведенное к статору добавочное сопротивление в цепи ротора. Введение добавочного активного сопротивления увеличивает полное сопротивление роторной цепи, в результате чего уменьшается пусковой ток и увеличивается cosφ2роторной цепи, вследствие чего увеличивается активная составляющая тока ротора и, следовательно, пусковой момент двигателя. Обычно в роторную цепь двигателя с фазным ротором вводят секционированное сопротивление, ступени которого перемыкаются пусковыми контакторами. Расчет реостатных пусковых характеристик можно производить по формуле (3.29), используя значение sк, соответствующее величине R2добдля каждой ступени пускового сопротивления. Схема включения дополнительных сопротивлений и соответствующие реостатные механические характеристики двигателя показаны на рис.4.1. Механические характеристики имеют общую точку идеального холостого хода, равную скорости вращения электромагнитного поля статора ω0, а жесткость рабочей части характеристик уменьшается по мере возрастания суммарного активного сопротивления роторной цепи (r2 +Rдоб). При пуске двигателя сначала вводится полное добавочное сопротивление R1do6. По достижении скорости, при которой момент двигателя МII становится близким к моменту сопротивления Мс, часть пускового сопротивления шунтируется контактором К1, и двигатель переходит на характеристику, соответствующую величине добавочного сопротивления R2добПри этом момент двигателя увеличивается до значения М1. По мере дальнейшего разгона двигателя контактором К2закорачивается вторая ступень пускового сопротивления. После замыкания контактов контактора Кз двигатель переходит, на естественную характеристику и будет работать со скоростью, соответствующей точке 1. Величины добавочных сопротивлений легко определить графически. Проведем линию номинального момента двигателя и отметим точки пересечения этой линии с механическими характеристиками. Тогда отрезки, заключенные между точками, будут пропорциональны величинам сопротивления ступеней. 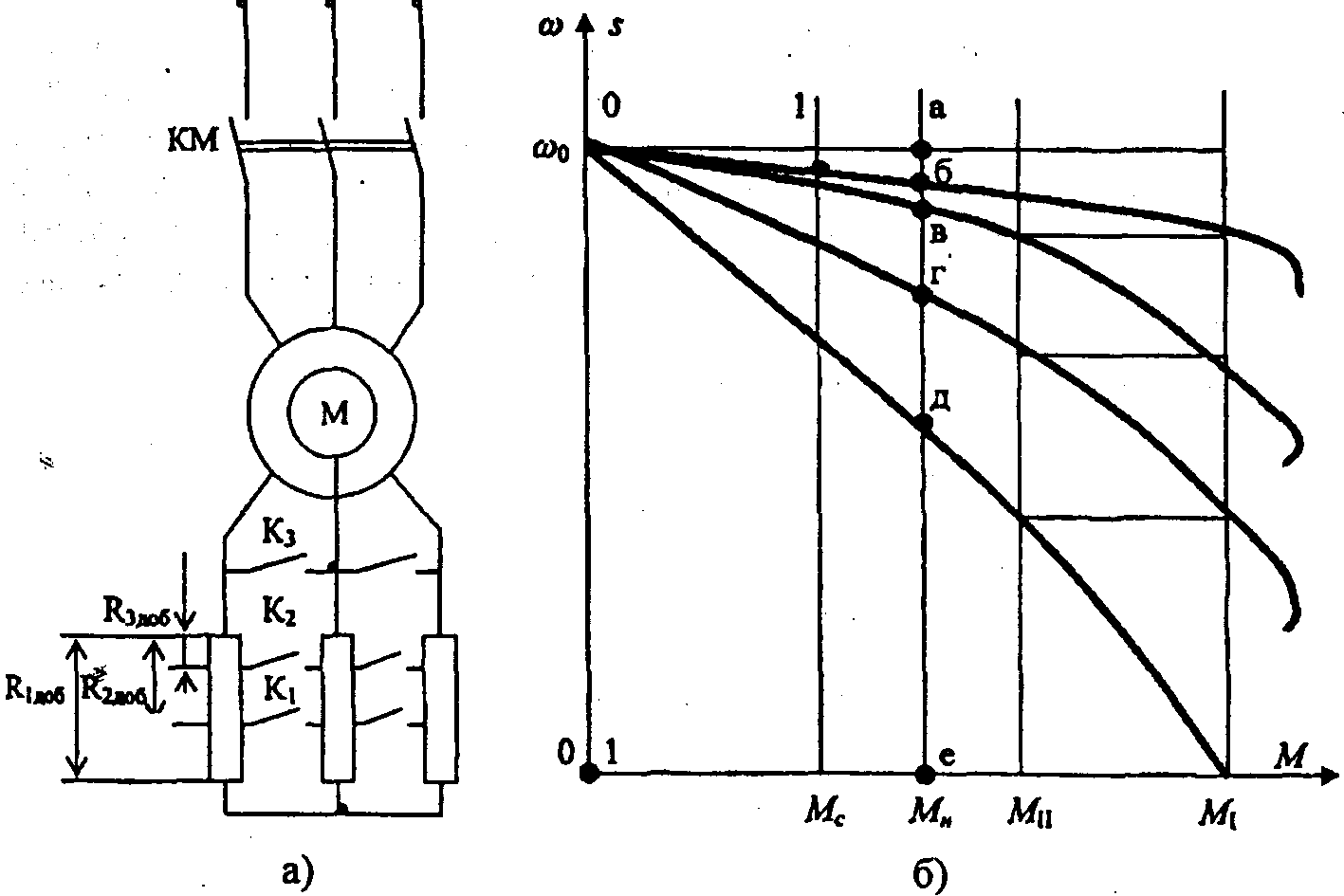 Рис.4.1. Схема включения пусковых сопротивлений (а) и реостатные механические характеристики асинхронного двигателя с фазным ротором (б) Полное добавочное сопротивление R1do6= R2ll (бд/ае). Первая ступень сопротивления R1do6 - R2do6 = R2и (гд/ае). Вторая ступень сопротивления R2do6 – R3do6=R2н(вг/ае). Третья ступень сопротивления R3do6= R2fl (бв/ае). Отрезок аб пропорционален сопротивлению обмотки фазы ротора rг= R2h(аб/ае). В приведенных соотношениях R2н – номинальное сопротивление ротора, которое определяется по формуле: где Е2н.лин – линейная э.д.с. ротора при s=1; 12н – номинальный ток ротора. 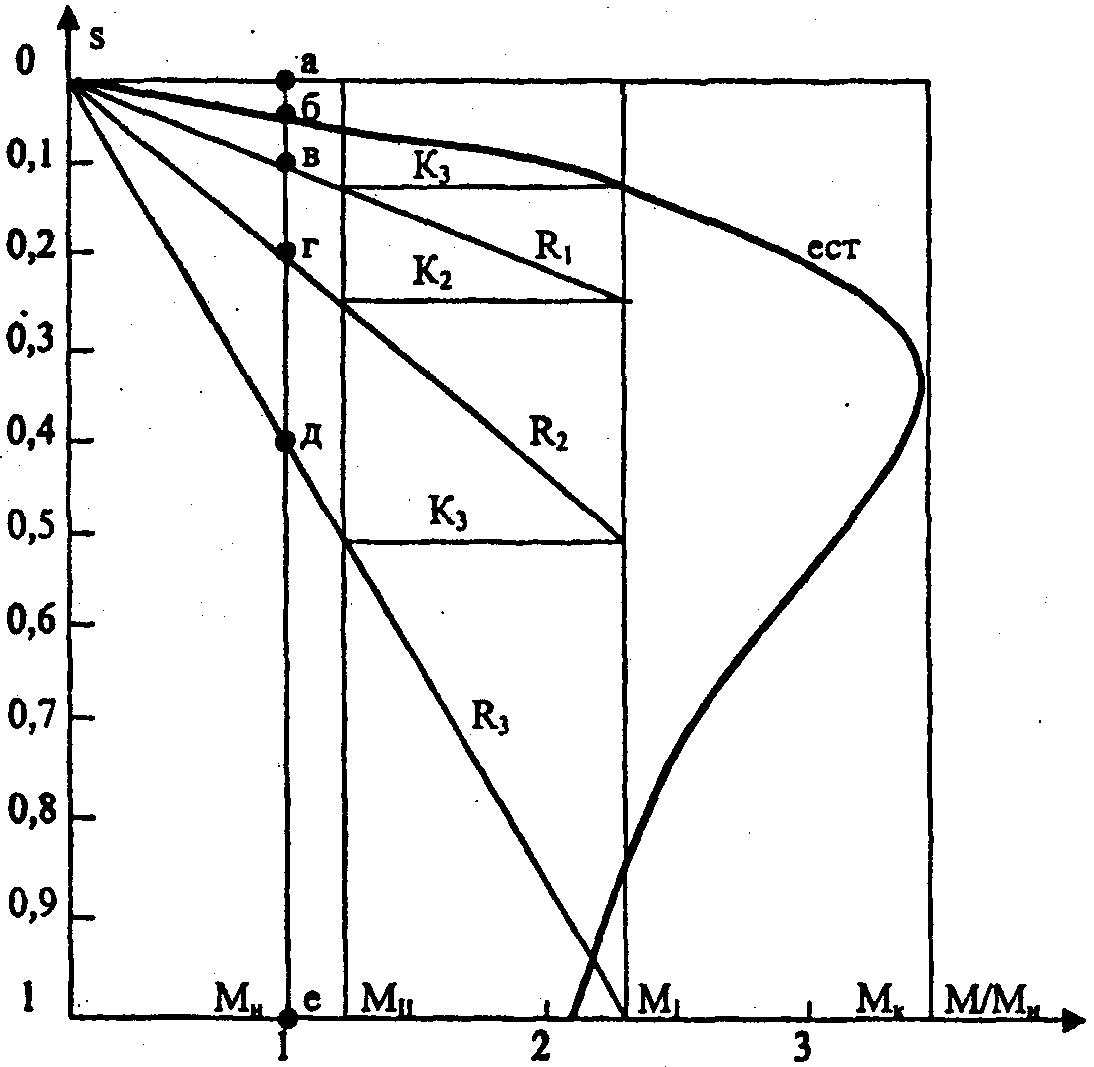 Рис.3.9. Естественная и пусковые механические характеристики асинхронного двигателя с фазным ротором 2. Пуск АД с короткозамкнутым ротором может быть:
а) путем переключения обмоток статора со схем Δ на в момент пуска. При этом напряжение уменьшается в и ток в 3 раза. б) введением в цепь статора реактора или автотрансформатора. При разомкнутом рубильнике 2 включают рубильник 1. При этом ток из сети поступает в обмотку статора через реакторы Р, на которых происходит падение напряжения jInxp(где хр— индуктивное сопротивление реактора, Ом). В результате на обмотку статора подается пониженное напряжение U’1 = Uном – jInxp. После разгона ротора двигателя включают рубильник 2 и подводимое к обмотке статора напряжение оказывается номинальным. Н  едостаток этого способа пуска состоит в том, что уменьшение напряжения в U’1/Uном раз сопровождается уменьшением пускового момента Мп в (U’1/Uном)2 раз. едостаток этого способа пуска состоит в том, что уменьшение напряжения в U’1/Uном раз сопровождается уменьшением пускового момента Мп в (U’1/Uном)2 раз.                Рис. 15.5. Схемы реакторного (а) и автотрансформаторного (б) и с тиристорным регулятором напряжения (в ) в цепи статора. При пуске двигателя через понижающий автотрансформатор (рис. 15.5, б) вначале замыкают рубильник 1, соединяющий обмотки автотрансформатора звездой, а затем включают рубильник 2 и двигатель оказывается подключенным на пониженное напряжение U’1. При этом пусковой ток двигателя, измеренный на выходе автотрансформатора, уменьшается в КA раз, где КA — коэффициент трансформации автотрансформатора. Что же касается тока в питающей двигатель сети, т. е. тока на входе автотрансформатора, то он уменьшается в КA2 раз по сравнению с пусковым током при непосредственном включении двигателя в сеть. Дело в том, что в понижающем автотрансформаторе первичный ток меньше вторичного в КA раз и поэтому уменьшение пускового тока при автотрансформаторном пуске составляет КA КA = КA2 раз. Например, если кратность пускового тока асинхронного двигателя при непосредственном его включении в сеть составляетIп/I1ном= 6, а напряжение сети 380 В, то при автотрансформаторном пуске с понижением напряжения до 220 В кратность пускового тока в сети I’п/I1ном= 6/(380/220)2 = 2. После первоначального разгона ротора двигателя рубильник 1 размыкают и автотрансформатор превращается в реактор. При этом напряжение на выводах обмотки статора несколько повышается, но все же остается меньше номинального. Включением рубильника 3 на двигатель подается полное напряжение сети. Таким образом, автотрансформаторный пуск проходит тремя ступенями: на первой ступени к двигателю подводится напряжение U1 = (0,50÷0,60)U1ном, на второй — U1 = (0,70÷0,80)U1ном и, наконец, на третьей ступени к двигателю подводится номинальное напряжение U1ном. Как и предыдущие способы пуска при пониженном напряжении, автотрансформаторный способ пуска сопровождается уменьшением пускового момента, так как значение последнего прямопропорционально квадрату напряжения. С точки зрения уменьшения пускового тока автотрансформаторный способ пуска лучше реакторного, так как при реакторном пуске пусковой ток в питающей сети уменьшается в U’1/Uном раз, а при автотрансформаторном — в (U’1/Uном)2 раз. Но некоторая сложность пусковой операции и повышенная стоимость пусковой аппаратуры (понижающий автотрансформатор и переключающая аппаратура) несколько ограничивают применение этого способа пуска асинхронных двигателей.
Стремление улучшить пусковые свойства асинхронных двигателей с короткозамкнутым ротором привело к созданию асинхронных двигателей с особой конструкцией ротора: двигателей с глубокими пазами на роторе и двигателей с двумя короткозамкнутыми клетками на роторе. Двигатель с глубокими пазами на роторе. От обычного асинхронного двигателя этот двигатель отличается тем, что у него пазы ротора сделаны в виде узких глубоких щелей, в которые вложены стержни обмотки ротора, представляющие собой узкие полосы. С обеих сторон эти стержни приварены к замыкающим кольцам. Обычно глубокий паз имеет соотношение размеров hп /bп = 9÷10, где hп,bп — высота и ширина паза. А момент включения двигателя, когда частота тока в роторе имеет наибольшее значение (f2 = f1), индуктивное сопротивление нижней части каждого стержня значительно больше верхней. Объясняется это тем, что нижняя часть стержня сцеплена с большим числом магнитных силовых линий поля рассеяния (рис. 15.6, а). На рис. 15.6, б показан график распределения плотности пускового тока в стержне ротора с глубокими пазами по высоте стержня. Из этого графика следует, что почти весь ток ротора проходит по верхней части стержня, поперечное сечение которой намного меньше сечения всего стержня. Это равноценно увеличению активного сопротивления стержня ротора, что, как известно, способствует росту пускового момента двигателя и некоторому ограничению пускового тока. Таким образом, двигатель с глубокими пазами на роторе обладает благоприятным соотношением пусковых параметров: большим пусковым моментом при сравнительно небольшом пусковом токе. По мере нарастания частоты вращения ротора частота тока в роторе убывает (f2 = sf1) В связи с этим уменьшается индуктивное сопротивление обмотки ротора х2= f2. Распределение плотности тока по высоте стержня в том случае становится более равномерным, что ведет к уменьшению активного сопротивления ротора. При работе двигателя с номинальной частотой вращения,  Рис 15.6 Ротор с глубокими пазами: а — устройство, б — распределение плотности тока ротора по высоте стержня при пуске и при работе двигателя когда f2 << f1 процесс «вытеснения» тока практически прекращается и двигатель работает, как обычный короткозамкнутый. Эффект вытеснения тока хорошо проявляется при пазах ротора бутылочной формы (рис. 15.7). В этом случае «вытеснение» тока происходит в верхнюю часть паза, имеющую меньшее сечение, а следовательно, больше активное сопротивление. Применение пазов бутылочной формы позволяет сократить высоту пазов ротора, а следовательно, уменьшить диаметр ротора по сравнению с глубокопазным ротором.  Рис 15.7. Бутылочная форма стержней ротора Двигатель с двумя, клетками на роторе. Еще лучшими пусковыми свойствами обладают асинхронные двигатели с двумя короткозамкнутыми клетками на роторе (рис. 15.8, а): рабочей клеткой 1, стержни которой расположены в нижнем слое, и пусковой клеткой 2, стержни которой расположены в верхнем слое, ближе к воздушному зазору. Стержни пусковой клетки обычно выполняют из латуни или бронзы — материалов, обладающих более высоким, чем у меди, активным сопротивлением. Индуктивное сопротивление рассеяния пусковой клетки невелико, так как ее стержни расположены вблизи воздушного зазора и к тому же с двух сторон имеют воздушные щели (рис. 15.8, б). Стержни рабочей клетки выполняют из меди, и по сравнению со стержнями пусковой клетки они имеют большее сечение. Это обеспечивает рабочей клетке малое активное сопротивление. Но зато индуктивное сопротивление рабочей клетки больше, чем у пусковой, особенно в начальный период пуска, когда частота тока в роторе сравнительно велика (f2 ≈ f1).  Рис 15.8. Двухклеточный ротор: а – устройство; б – распределение плотности тока в рабочей и пусковой клетках при пуске и работе двигателя В момент пуска двигателя ток ротора проходит в основном по верхней (пусковой) клетке, обладающей малым индуктивным сопротивлением. При этом плотность тока в стержнях пусковой клетки намного больше плотности тока в стержнях рабочей клетки (рис. 15.8, б). Повышенное активное сопротивление этой клетки обеспечивает двигателю значительный пусковой момент при пониженном пусковом токе. По мере увеличения частоты вращения ротора уменьшается частота тока в роторе, при этом индуктивное сопротивление рабочей клетки уменьшается, и распределение плотности тока в стержнях пусковой и рабочей клеток становится почти одинаковым. В итоге происходит перераспределение вращающего момента между клетками: если в начальный период пуска момент создается главным образом токами пусковой клетки, то по окончании периода пуска вращающий момент создается в основном токами рабочей клетки. Так как активные сопротивления клеток ротора неодинаковы, то зависимость М = f(s) этих клеток изображается разными кривыми (рис. 15.9). 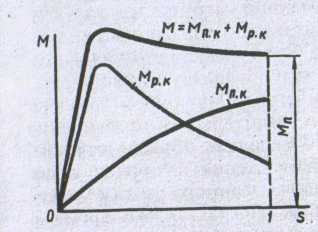 Рис 15.9. Механическая характеристика двухклеточного асинхронного двигателя Максимальное значение момента пусковой клетки вследствие ее повышенного активного сопротивления смещено в сторону скольжений, близких к единице. Вращающие моменты от обеих клеток направлены в одну сторону, поэтому результирующий момент двигателя равен сумме моментов пусковой Мпки рабочей Мраб.к клеток М = Мпк + Мраб.к |