Лекции Электропривод ГМиММ. 1. Роль электропривода в современных машинных технологиях
 Скачать 3.83 Mb. Скачать 3.83 Mb.
|

|
Способы регулирования скорости асинхронного двигателя Асинхронный двигатель является наиболее массовым электрическим двигателем. Эти двигатели выпускаются мощностью от 0,1 кВт до нескольких тысяч киловатт и находят применение во всех отраслях хозяйства. Основным достоинством асинхронного двигателя является простота его конструкции и невысокая стоимость. Однако по принципу своего действия асинхронный двигатель в обычной схеме включения не допускает регулирования скорости его вращения. Особое внимание следует обратить на то, что во избежание значительных потерь энергии, а, следовательно, для короткозамкнутых асинхронных двигателей во избежание перегрева его ротора, двигатель должен работать в длительном режиме с минимальными значениями скольжения. Рассмотрим возможные способы регулирования скорости асинхронных двигателей (см. рис.6.1). Скорость двигателя определяется двумя параметрами: скоростью вращения электромагнитного поля статора ω0 и скольжением s: ω = ω0 – sабс ω = ω0 – ω0s (6.1) 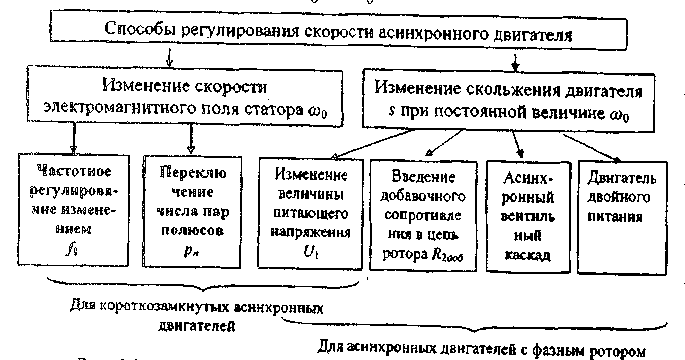 Рис.6.1. Классификация способов регулирования асинхронных двигателей Исходя из (6.1) принципиально возможны два способа регулирования скорости: регулирование скорости вращения поля статора и регулирование скольжения при постоянной величине ω0. Скорость вращения поля статора определяется двумя параметрами (см.3.3): частотой напряжения, подводимого к обмоткам статора _f1, и числом пар полюсов двигателя рп. В соответствии с этим возможны два способа регулирования скорости: изменение частоты питающего напряжения посредством преобразователей частоты, включаемых в цепь статора двигателя (частотное регулирование), и путем изменения числа пар полюсов двигателя. Регулирование скольжения двигателя при постоянной скорости вращения поля статора для короткозамкнутых асинхронных двигателей возможно путем изменения величины напряжения статора при постоянной частоте этого напряжения. Для асинхронных двигателей с фазным ротором, кроме того, возможны еще два способа: введение в цепь ротора добавочных сопротивлений (реостатное регулирование) и введение в цепь ротора добавочной регулируемой э.д.с. посредством преобразователей частоты, включаемых в цепь ротора (асинхронный вентильный каскад и двигатель двойного питания). В настоящее время благодаря развитию силовой преобразовательной техники созданы и серийно выпускаются различные виды полупроводниковых преобразователей частоты, что определило опережающее развитие и широкое применение частотно-регулируемого асинхронного электропривода. Основными достоинствами этой системы регулируемого электропривода являются:
Недостатками частотного регулирования являются сложность и высокая стоимость (особенно для приводов большой мощности) преобразователей частоты и сложность реализации в большинстве схем режима рекуперативного торможения. Изменение скорости переключением числа пар полюсов асинхронного двигателя позволяет получать несколько (от 2 до 4) значений рабочих скоростей, т.е. плавное регулирование скорости и формирование переходных процессов при этом способе невозможно. Поэтому данный способ имеет определенные области применения, но не может рассматриваться, как основа для построения систем регулируемого электропривода. Регулирование скорости асинхронного двигателя изменением величины питающего напряжения при постоянной (стандартной) его частоте для асинхронных двигателей с короткозамкнутым ротором имеет ограниченное применение вследствие того, что регулирование скорости здесь сопряжено с потерями энергии скольжения, выделяющимися в роторе двигателя и ведущими к его перегреву. Получаемые при этом способе механические характеристики неблагоприятны для качественного регулирования. Диапазон регулирования не превышает 1,5:1; более глубокое регулирование скорости можно допускать только кратковременно. Исходя из данной оценки, регулирование изменением величины питающего напряжения применяется, главным образом, только для обеспечения плавного пуска нерегулируемых асинхронных электроприводов или для кратковременного снижения скорости. Иногда этот способ регулирования используется для регулирования скорости насосов и вентиляторов (механизмов с вентиляторным характером нагрузки) небольшой мощности (до 15 кВт), однако и в этом случае необходимо увеличение установленной мощности двигателя. Для асинхронных двигателей с фазным ротором регулирование скорости может производиться воздействием на роторную цепь двигателя. При введении добавочного сопротивления в цепь ротора энергия скольжения рассеивается не в объеме двигателя, а в сопротивлениях. Этот способ регулирования оценивается как неэкономичный. При использовании релейно-контакторных схем исключается плавность регулирования скорости. В настоящее время управление с введением добавочных сопротивлений в цепь ротора используется, в основном, для пуска асинхронных двигателей с фазным ротором. Электроприводы с реостатно-контакторным управлением не рассматриваются нами, как регулируемые электроприводы. Все способы регулирования, основанные на изменении скольжения асинхронного двигателя, связаны с выделением энергии скольжения в роторной цепи двигателя. В рассматриваемых выше способах эта энергия расходовалась на нагрев обмотки ротора и роторных сопротивлений. Существуют системы регулируемого электропривода, в которых энергия скольжения не теряется в сопротивлениях, а используется полезно – возвращается в питающую сеть, что делает регулирование в этих системах экономичным. К таким системам регулируемого привода относятся асинхронные вентильные каскады и двигатели двойного питания. Особенностью каскадных схем асинхронного привода является ограниченный диапазон регулирования – не больше, чем 2:1. В этом диапазоне каскадные схемы обеспечивают плавное и экономичное регулирование скорости. Такие системы электропривода наиболее целесообразны для мощных турбомеханизмов-насосов и вентиляторов. Лекция №4 4.1. Регулирование скорости изменением числа пар полюсов Скорость вращения электромагнитного поля статора зависит от числа пар полюсов двигателя рп,, поэтому имеются специальные модификации асинхронных короткозамкнутых двигателей, позволяющие изменять число пар полюсов машины и тем самым получать две или более (3 и 4) рабочие скорости двигателя. Конструктивно изменение числа пар полюсов может быть достигнуто двумя способами. При первом в пазы статора укладываются две или три независимые обмотки с различными значениями рп. При этом значительно увеличиваются габариты двигателей, но возможно получение любого соотношения числа пар полюсов. При другом способе используется для получения различного числа пар полюсов одна и та же обмотка, а изменение рп достигается переключением секций этой обмотки. Наибольшее распространение получили две схемы обмоток: звезда ( ) - двойная звезда () и треугольник (Δ) - двойная звезда. Рассмотрим схему звезда - двойная звезда (см. рис.3.21). В этой схеме каждая из фазных обмоток состоит из двух секций, которые могут включаться параллельно или последовательно. При параллельном соединении напряжение подводится к средним точкам обмоток, а начала обмоток замыкаются между собой. Образуются две параллельно включенные системы обмоток, соединенные в двойную звезду (). Такое соединение соответствует меньшему числу пар полюсов рп. Этой схеме соединения отвечает механическая характеристика с индексом на рис.3.21,б. При последовательном соединении секций обмоток число пар полюсов увеличивается вдвое, поэтому номинальная скорость двигателя в этом случае будет вдвое меньше. Так, например, если схеме соединения соответствует число пар полюсов рп = 2, то номинальная скорость вращения будет 1470 об/мин (п0 = 1500 об/мин). Переключив обмотки для соединения в звезду ( ), получим рп = 4 и номинальную скорость вращения 735 об/мин (п0 = 750 об/мин).  Рис.3.21. Схема (а) и механические характеристики (б) двухскоростного асинхронного двигателя со схемой соединения Поскольку длительно допустимый ток в обмотках должен остаться неизменным, то номинальная мощность на валу двигателя будет: при схеме Рдв = 3U1 · 2I1н · cosφ1 · ήн, при схеме Рдв = 3U1 · I1н · cosφ1 · ήн, Т.е. мощность двигателя при высокой скорости будет примерно в 2 раза выше, чем при низкой скорости. Однако длительно допустимый номинальный момент сохраняется постоянным, т к Мн = Рн/ωн Рассмотрим схему треугольник - двойная звезда (рис.3. 22) В этой схеме соединение обмоток двойная звезда соответствует высокой скорости. При последовательном включении полуобмоток и соединении их в треугольник число пар полюсов увеличивается вдвое, следовательно, вдвое снижается скорость двигателя. 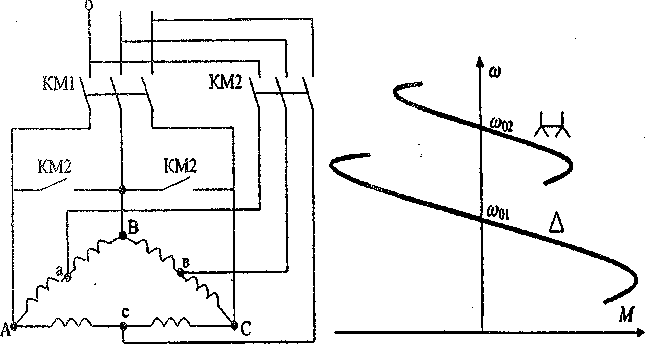 Рис.3.22. Схема и механические характеристики двухскоростного двигателя Мощность двигателя при этом будет: здесь U1 – фазное напряжение питания. Длительно допустимый момент при соединении обмоток в Δ будет в Двух и многоскоростные двигатели применяются в тех случаях, когда по условиям технологии необходимо иметь две или более фиксированные скорости вращения приводного электродвигателя. 4.2 Регулирование скорости АД изменением скольжения Величина потока асинхронного двигателя пропорциональна напряжению питания U1, величина э.д.с. ротора, а, следовательно, и ток ротораI2 также пропорциональны напряжению статора. Поэтому момент асинхронного двигателя, в том числе максимальный момент, пропорциональны квадрату напряжения U1 (см.3.21, 3.24). Это обстоятельство определяет недопустимость значительного снижения напряжения питания при пуске и работе асинхронного двигателя. Так, при снижении питающего напряжения на 30% его максимальный момент уменьшится примерно в два раза и при значительном статическом моменте двигатель может «опрокинуться», т.е. остановиться и оказаться под пусковым током. Этот режим является для двигателя аварийным. Такая же ситуация может сложиться, если напряжение питания снижено при пуске двигателя под нагрузкой. Указанные случаи имеют место в слабых электрических сетях, что обуславливает большую аварийность асинхронных короткозамкнутых двигателей. Во избежание этого должны предусматриваться необходимые защитные средства, предотвращающие длительное нахождение асинхронного двигателя под пусковым током. В то же время преднамеренное снижение (регулирование) напряжения, подаваемого на статорные обмотки, иногда используется для регулирования скорости асинхронного двигателя и для обеспечения плавности пуска. Регулирование скорости асинхронного двигателя путем изменения питающего напряжения сопряжено с возможностью перегрева его ротора и может производиться лишь при определенных условиях:
Рассмотрим механические характеристики асинхронного короткозамкнутого двигателя с повышенным скольжением при регулировании напряжения статора (рис.3.13). При снижении напряжения U1 критическое скольжение двигателя и скорость идеального холостого хода ω0 остаются постоянными, а максимальный момент Мк двигателя уменьшается примерно пропорционально квадрату снижения напряжения, соответственно снижается жесткость рабочей части механической характеристики двигателя. Регулирование скорости возможно в диапазоне ω0 ÷ ω0 (1 – sк). Предположим, что момент сопротивления на валу двигателя остается постоянным и равным номинальному Мс = Мн. При снижении напряжения до величины U12 двигатель будет работать со скоростью, равной ω0 (1 –sр) со скольжениемsр. Мощность скольжения Рsвыделяемая в виде потерь в роторе двигателя будет равна Рs = Мн · ω0 ·sр и пропорциональна заштрихованной площади прямоугольника. Электромагнитная мощность Рэм = Мс · ω0 пропорциональна площади Оаг1, полезная мощность на валу двигателя Ммех = Мс · ω0 = Мс · ω0 ·(1 –sр) будет пропорциональна площади sрв,г1. Номинальная мощность скольжения, на рассеяние которой рассчитана конструкция двигателя, пропорциональна площади Оаб5н. Сравним эту площадь с заштрихованной (Oaвsp), которая отражает потери в роторе двигателя при работе в точке «в». Она примерно в 3 раза превосходит номинальные потери в роторе. Естественно, что при длительной работе в указанном режиме ротор двигателя будет перегреваться и двигатель выйдет из строя. Для того, чтобы можно было применить данный способ регулирования, нужно установленную мощность двигателя завысить в 3 раза или применить специальную конструкцию интенсивного теплоотвода.  Рис.3.13. Механические характеристики асинхронного двигателя при регулировании напряжения питания а) при постоянном моменте; б) при вентиляторном моменте нагрузки Поэтому регулирование скорости изменением напряжения питания возможно в том случае, если момент сопротивления Мс при снижении скорости существенно меньше номинального. Такой способ регулирования применяется иногда для привода насосов и вентиляторов, у которых момент сопротивления на валу резко снижается при уменьшении скорости. Этот случай рассмотрен на рис.3.13,6. Поскольку со снижением скорости Мс уменьшается примерно в квадрате от величины снижения скорости, то мощность скольжения Рs со снижением скорости растет не столь существенно. Если нагрузка на валу двигателя носит вентиляторный характер, то максимальная величина мощности скольжения составляет 15% от мощности на валу при номинальной скорости. Поэтому для привода вентиляторов и насосов достаточно увеличение установленной мощности двигателя с повышенным скольжением в 1,5-2 раза. Снижение напряжения на статоре асинхронного двигателя иногда используется для уменьшения пусковых токов двигателя. Это возможно, если момент сопротивления на валу двигателя при пуске не превышает 0,3-0,4/Н, (насосы, вентиляторы или другие рабочие машины, пуск которых производится вхолостую). В этом случае посредством тиристорного регулятора напряжение, подводимое к обмотке статора, снижается, а затем по мере разгона двигателя увеличивается до номинального значения. Этим обеспечивается «плавный пуск» двигателя с уменьшенными пусковыми токами и сниженными динамическими нагрузками на рабочую машину. 4.3. Регулирование скорости асинхронного двигателя в каскадных схемах его включения Регулирование скорости АД при использовании некоторых рассмотренных способов сопровождается выделением в цепи ротора потерь мощности ΔР2 = Мω0s, что значительно снижает экономические показатели асинхронного ЭП. Первые схемы, в которых полезно использовалась энергия потерь, создавалась путем специального соединения АД с другими электрическими машинами. Поэтому эти схемы получили название каскадных: "В настоящее время существуют схемы, использующие энергию скольжения АД без добавочных электрических машин, а с помощью полупроводниковых приборов и трансформаторов. Однако эти схемы также называют каскадными. В общем случае каскадными называют такие схемы включения АД, которые, обеспечивая регулирование его скорости, позволяют одновременно полезно использовать энергию потерь в роторе. 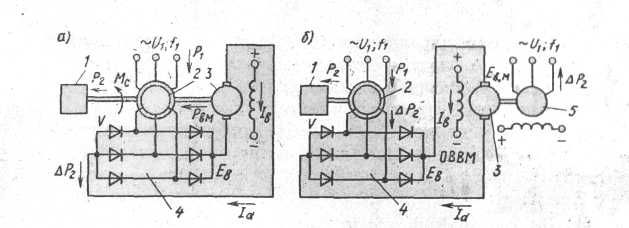 Рис. 5.31. Схемы электромеханического (а) и электрического (б) вентильно-машинных каскадов По способу использования этой энергии различают схемы электромеханического машинно-вентильного каскада и электрического каскада. В электромеханическом машинно-вентильном каскаде (рис. 5.31, а) обмотка ротора АД 2, приводящего в движение рабочую машину 1, подключается к трехфазному неуправляемому выпрямителю 4, собранному на полупроводниковых вентилях. К выводам выпрямителя присоединен якорь вспомогательной машины 3 постоянного тока, ЭДС которой Ев м направлена навстречу ЭДС выпрямителя Ев. АД 2 и машина 3 соединены одним валом.. Если пренебречь потерями в схеме, то можно установить, что рабочей машине 1 передается вся электромагнитная мощность Рэм. Действительно, на вал от АД 2 поступает мощность Р2 = Мω, от вспомогательной машины 3— мощность РВ М= ΔР2 = = Мω0s, в результате суммарная механическая мощность на валу рабочей машины РР М = Р2 + Рв м = Мω + Мω0s = Мω0 = Рэм. В электрическом каскаде (рис. 5.31,6) в отличие от электромеханического вспомогательная машина 3 не имеет механической связи с АД 2, а соединена одним валом с синхронным генератором 5, подключенным к сети переменного тока. За счет этого I, энергия потерь передается не на вал рабочей машины 1, а с помощью генератора 5 отдается в сеть, а рабочей машине передается только механическая мощность Р2 = Мω. Рассмотрим регулирование скорости в каскадных схемах, которое происходит за счет изменения ЭДС Евм вспомогательной машины 3 за счет воздействия на ток возбуждения IВ этой машины. Предположим, что при работе ЭП в установившемся режиме происходит увеличение тока возбуждения IВ. Это повлечет за собой увеличение ЭДС Евм и вследствие этого уменьшение выпрямленного. тока Id, который определяется выражением Id = (Ев–Ев м)/R∑, (5.35) где R∑, — суммарное активное сопротивление цепи выпрямленного тока; Ев — ЭДС выпрямителя 4. Уменьшение Id и тем самым тока ротора АД 2 вызовет снижение его момента, который станет меньше момента нагрузки Мс, создаваемого рабочей машиной 1. В результате скорость двигателя начнет снижаться, а его скольжение и ЭДС роторной обмотки Е2 = Е2кs начнут возрастать. Увеличение ЭДС ротора приведет к увеличению тока ротора и тем самым момента АД, который вновь станет равным моменту нагрузки, и скорость АД перестанет изменяться. Двигатель опять будет работать в установившемся режиме, но уже при более низкой скорости. В случае уменьшения тока Iв скорость АД будет возрастать. Из механических характеристик электромеханического каскада для разных значений токов Iв (рис. 5.32, а) видно, что максимальный, момент по мере снижения скорости каскада возрастает, поскольку по мере увеличения тока возбуждения вспомогательной машины ее момент также возрастает. При этом максимальная механическая мощность каскада, определяемая произведением максимального момента на соответствующую этому моменту скорость, при I разных токах возбуждения вспомогательной машины 1 примерно одинакова. Поэтому электромеханический каскад называют каскадом постоянной мощности. 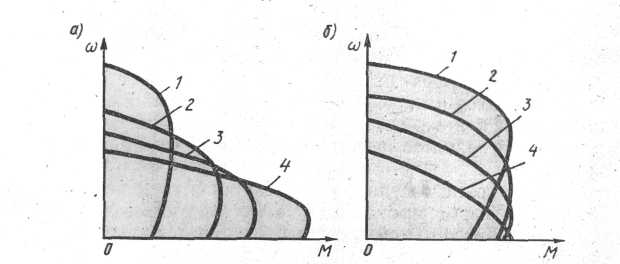 Рис. 5.32. Механические характеристики электромеханического (а) и электрического (в) каскадов: 1—4—соответственно при Iв = 0; 0,2; 0,4 При токе возбуждения вспомогательной машины, близком к нулю, механическая характеристика (рис. 5.32, б) электрического каскада близка к естественной характеристике АД. По мере увеличения тока возбуждения искусственные характеристики 2—4 располагаются ниже естественной 1, причем номинальному току возбуждения Iв ном соответствует самая низкая характеристика. Максимальный момент каскада, определяемый только АД 2 (см. рис. 5.31), сохраняется на разных характеристиках примерно постоянным. Поэтому электрический каскад называют каскадом постоянного момента. В настоящее время в связи с широким распространением силовых тиристорных преобразователей появилась возможность заменять ими электромашинные вращающиеся преобразователи. В частности, электромашинный агрегат 3—5 (см. рис. 5.31,6) представляет собой преобразователь энергии постоянного тока, поступающей от выпрямителя 4, в энергию переменного тока, отдаваемую в сеть. Такой машинный агрегат может быть заменен на статический преобразователь "частоты, состоящий из трансформатора 2 и инвертора 3 (рис. 5:33). К обмотке ротора АД 1 подключен неуправляемый выпрямитель 5 и инвертор 3, а также реактор 4, который служит для сглаживания пульсаций выпрямленного тока. Асинхронный ЭП по схеме рис. 5.33 получил название асинхронного вентильного каскада. Инвертор, представляет собой преобразователь энергии постоянного тока в энергию переменного тока. Электродвижущую силу инвертора можно регулировать аналогично тому, как регулируется ЭДС машины постоянного тока. Поэтому механические характеристики асинхронного вентильного каскада аналогичны характеристикам вентильно-машинного электрического каскада.  Рис 5.33. Схема асинхронного винительного каскада Существует много схем асинхронных вентильных каскадов, аналогичных рассмотренной. Эти схемы несколько отличаются по своей сложности, техническим возможностям регулирования скорости, энергетическим показателям и т. д: Однако принцип действия и назначение этих схем аналогичны: использование энергии скольжения для .совершения, полезной работы и возможность плавного регулирования скорости АД. Отметим основные показатели регулирования скорости АД в каскадных схемах включения. |