Лекции Электропривод ГМиММ. 1. Роль электропривода в современных машинных технологиях
 Скачать 3.83 Mb. Скачать 3.83 Mb.
|

|
Достоинством режима динамического торможения является его высокая надежность, определяемая тем, что этот режим может осуществляться при исчезновении питающего напряжения и в случае выхода из строя источника питания цепи якоря, когда режим рекуперативного торможения становится невозможен. Исходя из этого, динамическое торможение в приводах постоянного тока часто используется в качестве средства аварийного торможения. Торможение противовключением не характерно для двигателей постоянного тока независимого возбуждения. Этот режим может использоваться в приводах малой мощности с широтно-импульсным регулятором тока, позволяющим ограничить ток торможения допустимой величиной. 5.2 Электропривод с двигателями постоянного тока с последовательным возбуждением В рассматриваемых двигателях постоянного тока обмотка возбуждения включается (рис.5.16) возбуждения включается (рис. 5.16) последовательно с обмоткой якоря, в результате чего ток возбуждения равен току якоря и создаваемый им поток Ф будет пропорционален току якоря Ф = аIя (5.25) 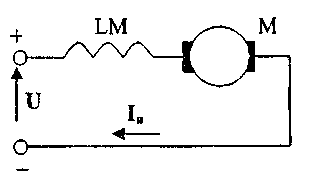 Рис.5.16. Схема включения двигателя постоянного тока последовательного возбуждения Здесь а – нелинейный коэффициент а = f(Iя); нелинейность этого коэффициента связана с формой кривой намагничивания и размагничивающим действием реакции якоря; оба этих фактора проявляются при больших токах Iя > 0,7 - 0,8Iя ; при малых токах якоря коэффициент а можно считать величиной постоянной. При токах якоря Iя > 2Iян машина насыщается, и величина потока мало зависит от тока якоря, Зависимость потока возбуждения от нагрузки (см. 5.25) определяет своеобразие электромеханических характеристик двигателя постоянного тока последовательного возбуждения. Для изменения направления вращения двигателя последовательного возбуждения недостаточно изменить полярность напряжения, подводимого к двигателю, т.к. при этом изменится одновременно и направление тока в обмотке якоря и полярность потока возбуждения. Поэтому для реверсирования двигателя нужно изменить направление тока в одной из частей машины, например в обмотке возбуждения, оставив направление тока в обмотке якоря неизменным, как это показано на схеме рис.5.17.  Рис.5.17. Схема реверсирования двигателя постоянного тока последовательно Подставив (5.25) в (5.2) и (5.3), получим основные соотношения для рассматриваемых двигателей. М = каIя2 (5.26) Ея = каIяω (5.27) Соответственно, выражение для электромеханической и механической характеристик двигателя последовательного возбуждения будут:  или или В первом приближении механическую характеристику двигателя постоянного тока последовательного возбуждения, если не учитывать насыщение магнитной цепи, можно представить в виде гиперболы, не пересекающей ось ординат, а асимптотически приближающуюся к ней. 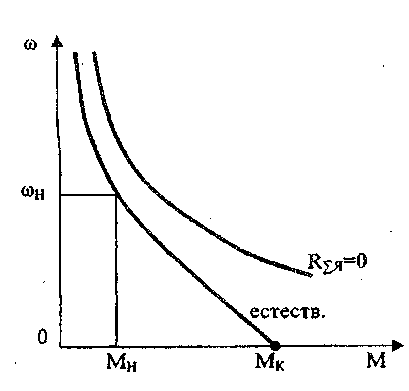 Рис.5.18. Естественная и «идеальная» механическая характеристика двигателя последовательного возбуждения Если положить (Rя + Rв)=0, то характеристика (см. рис.5.18) не будет пересекать и ось абсцисс. Такая характеристика называется «идеальной»; выше нее характеристики быть не могут. Реальная естественная характеристика пересекает ось абсцисс в точке, соответствующей току короткого замыкания (момент Мк). Если учитывать насыщение двигателя, то при моментах меньших 0,8А4 характеристика криволинейна и носит гиперболический характер; при больших значениях тока и момента поток вследствие насыщения становится постоянным и характеристика выпрямляется. Характерной особенностью характеристик двигателя последовательного возбуждения является отсутствие точки идеального холостого хода. При уменьшении нагрузки скорость двигателя существенно возрастает, вследствие чего оставлять двигатель без нагрузки недопустимо. 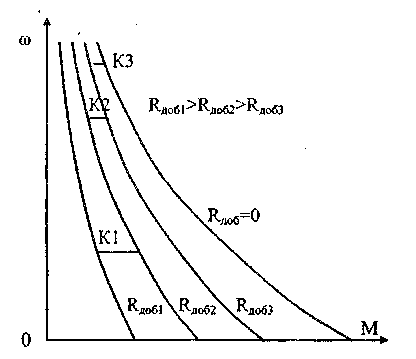 Рис.5.19. Реостатные механические характеристики двигателя последовательного возбуждения Важным достоинством двигателей последовательного возбуждения является большая перегрузочная способность на низких скоростях. При перегрузке по току в 2,25-2,5 раза двигатель развивает момент 3,0-3,5 номинального. Это обстоятельство определило широкое использование двигателей последовательного возбуждения для электрических транспортных средств, где наибольшие моменты необходимы при трогании с места. Вторым важным достоинством двигателей последовательного возбуждения является отсутствие источника питания для цепи возбуждения двигателя. Искусственные механические характеристики могут быть получены тремя способами: включением добавочного сопротивления в цепь якоря, изменением величины питающего напряжения и шунтированием обмотки якоря добавочным сопротивлением. При введении добавочного сопротивления в цепь якоря жесткость механических характеристик уменьшается и уменьшается значение Мк (см. рис.5.19). Этот способ регулирования используется при пуске двигателя, когда ступени сопротивления перемыкаются пусковыми контакторами К1, К2, КЗ. На рис.5.19 показаны пусковые характеристики, соответствующие трехступенчатой схеме пуска. Длительная работа на реостатных характеристиках сопряжена со значительными потерями энергии в сопротивлениях. Наиболее экономичным способом регулирования скорости двигателя последовательного возбуждения является изменение величины подводимого к двигателю напряжения. Механические характеристики, соответствующие этому способу регулирования, показаны на рис.5.20. 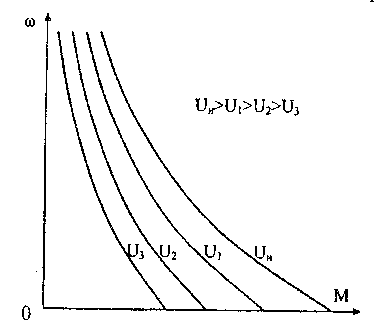 Рис.5.20. Механические характеристики двигателя последовательного возбуждения при изменении питающего напряжения По мере уменьшения напряжения они смещаются вниз параллельно естественной характеристике. Внешне искусственные характеристики при регулировании изменением напряжения схожи с реостатными характеристиками, однако, есть существенная разница в этих способах регулирования. Реостатное регулирование сопряжено с потерей энергии в добавочных сопротивлениях, а при регулировании изменением напряжения дополнительные потери отсутствуют. 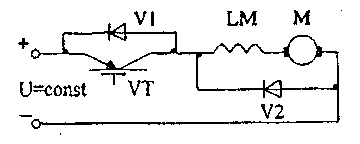 Рис.5.21. Схема регулируемого электропривода с двигателем постоянного тока последовательного возбуждения и широтно-импульсным регулятором напряжения Двигатели последовательного возбуждения часто получают питание от сети постоянного тока или источника постоянного тока с нерегулируемой величиной напряжения. Регулирование напряжения на зажимах двигателя в этом случае целесообразно производить способом широтно-импульсного регулирования, который рассмотрен ниже. Упрощенная схема регулируемого электропривода с двигателем постоянного тока последовательного возбуждения и широтно-импульсным регулятором напряжения показана на рис.5.21 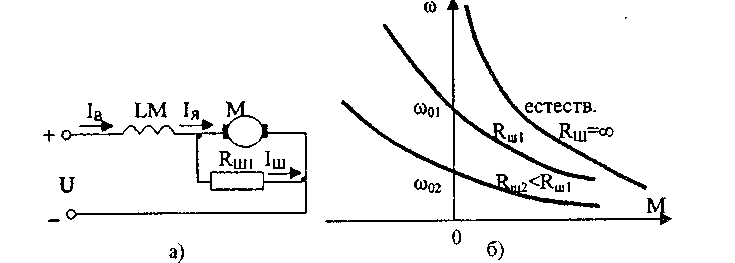 Рис.5.22. Схема и механические характеристики двигателя последовательного возбуждения при шунтировании обмотки якоря Изменение потока возбуждения в рассматриваемых двигателях возможно, если зашунтировать обмотку якоря сопротивлением (см. рис.5.22,а). В этом случае ток возбуждения будет равен т.е. содержит постоянную составляющую, не зависящую от нагрузки двигателя. При этом двигатель приобретает свойства двигателя смешанного возбуждения: независимого и последовательного. Благодаря независимому возбуждению механические характеристики т.е. содержит постоянную составляющую, не зависящую от нагрузки двигателя. При этом двигатель приобретает свойства двигателя смешанного возбуждения: независимого и последовательного. Благодаря независимому возбуждению механические характеристики приобретают большую жесткость и пересекают ось ординат. Примерные механические характеристики для этого способа регулирования показаны на рис.5.22,6. Шунтирование якоря позволяет получить устойчивую пониженную скорость при отсутствии нагрузки на валу двигателя. В данной схеме возможен переход двигателя в режим рекуперативного торможения при скорости ω > ω01 или ω > ω02. Существенным недостатком рассматриваемого способа регулирования является его неэкономичность, обусловленная большими потерями энергии в шунтирующем сопротивлении. Для двигателей последовательного возбуждения характерны два режима торможения: противовключением и динамический. В режиме противовключения необходимо включение добавочного сопротивления в цепь якоря двигателя. На рис.5.23 показаны механические характеристики для двух вариантов режима противовключения. Характеристика 1 получается, если при работе двигателя в направлении «вперед» (точка в) изменить направление тока в обмотке возбуждения и одновременно ввести в цепь двигателя добавочное сопротивление. При этом двигатель переходит в режим противовключения в точке а с тормозным моментом Мторм, под действием которого будет происходить торможение двигателя. 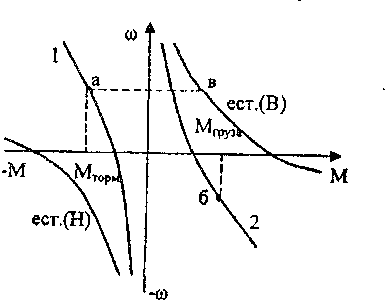 Рис.5.23. Механические характеристики двигателя последовательного возбуждения в режиме противовключения При этом благодаря тому, что в цепь двигателя включено большое добавочное сопротивление (которому соответствует характеристика 2), двигатель под действием момента, создаваемого грузом, вращается в обратном направлении и будет работать в точке б, в которой активный статический момент Мгруза уравновешивается тормозным моментом двигателя, работающего в режиме противовключения. Режим противовключения сопряжен со значительными потерями энергии в цепи двигателя и добавочной сопротивления. Режим динамического торможения для двигателей последовательного возбуждения возможен в двух вариантах. В первом - якорь двигателя замыкается на сопротивление, а обмотка возбуждения питается от сети через добавочное сопротивление. Характеристики двигателя в этом режиме подобны характеристикам двигателя независимого возбуждения в режиме динамического торможения. Во втором варианте, двигатель работает как генератор с самовозбуждением. Особенность данной схемы состоит в том, что при переходе из двигательного режима в режим динамического торможения необходимо сохранить направление тока в обмотке возбуждения во избежание размагничивания машины. При размыкании контактора КМ ток в обмотке возбуждения становится равным нулю, но, так как магнитопровод машины был намагничен, то сохраняется остаточный поток возбуждения, благодаря которому в обмотке якоря вращающегося двигателя наводится э.д.с., под действием которой при замыкании контактов КВ в цепи обмотка якоря-обмотка возбуждения-сопротивление К протекает ток, и машина самовозбуждается. Этот процесс происходит, если скорость двигателя будет больше граничной скорости ωгр Механические характеристики в режиме динамического торможения с самовозбуждением показаны на рис.5.25. 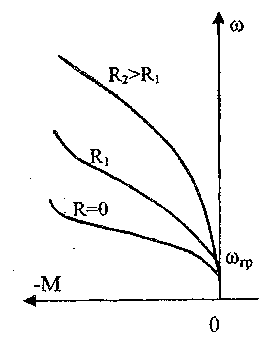 Рис.5.25. Механические характеристики двигателя последовательного возбуждения в режиме динамического торможения с самовозбуждением Режим рекуперативного торможения в обычной схеме включения двигателя последовательного возбуждения невозможен. Для его осуществления необходимо шунтирование якоря двигателя, либо применение отдельной дополнительной обмотки независимого возбуждения. 6. Переходные процессы в электроприводе 6.1. Общие сведения При пуске и останове электродвигателя, при его реверсе, изменении задания на скорость в регулируемом электроприводе, при приложении (или снятии) к валу двигателя механической нагрузки изменяются параметры электропривода: ток, момент, скорость и другие. При этом привод переходит из одного установившегося режима работы с одними параметрами движения в другой установившийся режим с другими параметрами. Однако этот переход не может быть мгновенным, т.к. ток в двигателе из-за электромагнитной инерционности его цепей не может изменяться мгновенно, также не может изменяться мгновенно скорость двигателя из-за механической инерционности движущихся масс электропривода. Переходным процессом (переходным режимом) электропривода называется протекающий во времени процесс перехода от одного установившегося режима работы (или отключенного состояния) к другому установившемуся состоянию. Причиной возникновения переходных процессов могут быть:
Необходимость изучения, а затем и формирования переходных процессов, определяется тем, что многие электроприводы работают в интенсивных динамических режимах, в которых происходит резкое приложение нагрузки, необходимо быстрое изменение скорости и т.д. Таковы электроприводы металлорежущих станков, горных экскаваторов, прокатных станов и других машин. Для этих машин возникает задача сокращения длительности переходных процессов, т.е. повышение быстродействия электропривода. Есть рабочие машины, для которых важнейшим требованием является стабильность скорости вращения (например, машины для производства бумаги, пленки и т.п.). Здесь при приложении возмущающих воздействий важна минимизация величины отклонения от заданных параметров движения. 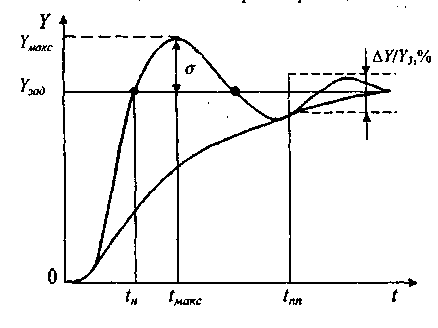 Рис.8.1. Динамическая (переходная) характеристика системы регулирования Большое значение имеет анализ переходных процессов для следящих электроприводов, которые работают, как правило, в переходных режимах, отрабатывая изменяющееся задание скорости и положения. Переходные процессы могут быть колебательными или апериодическими, как показано на рис.8.1, и характеризуются следующими показателями. Время переходного процесса (tnn - время, начиная с которого регулируемый параметр Y входит и остается в зоне допустимых отклонений от заданного значения Yзад. Обычно в системах электропривода эта зона принимается равной ±2% или ±5% от заданной величины регулируемого параметра. Время нарастания до заданного значения tн - время, когда регулируемый параметр Y первый раз достигает заданного значения. Перерегулирование Эти показатели качества переходных процессов приводятся для случая, когда на систему регулирования действует ступенчатое (единичное) управляющее или возмущающее воздействие. Для расчета и анализа переходных процессов необходимо найти переходную функцию – зависимость параметров электропривода (скорости, тока, момента и др.) от времени. Переходные функции описываются дифференциальными уравнениями. Порядок дифференциального уравнения будет определяться числом инерционностей, которые учитываются при рассмотрении данного переходного процесса. Ниже перечислены основные инерционности, характерные для электроприводов. Механическая инерционность, связанная с накоплением и отдачей кинетической энергии; величина механической инерционности определяется для вращательного движения моментом инерции J∑, приведенным к валу электродвигателя; при анализе переходных процессов механическая инерционность оценивается электромеханической постоянной времени где β – абсолютная величина (без учета знака) жесткости механической характеристики электропривода. Электромагнитная инерционность, связанная с накоплением (отдачей) энергии электромагнитного поля; эта инерционность оценивается электромагнитной постоянной времени где L и R - индуктивность и активное сопротивление электромагнитного устройства (например, обмотки двигателя). Электростатическая инерционность, связанная с накоплением (отдачей) энергии электростатического поля; эта инерционность оценивается постоянной времени Тс = RС (8.3) где С – емкость конденсатора, R– сопротивление цепи его заряда-разряда. Существуют инерционности и другой физической природы, которые иногда следует учитывать при анализе переходных процессов. Если предположить, что инерционности отсутствуют или они пренебрежимо малы, то переходные процессы будут протекать мгновенно. Наличие в реальных системах инерционностей различной физической природы обуславливает затягивание переходных процессов, связанное с тем, что в процессе перехода системы из одного состояния в другое происходит накопление (запасание) или отдача энергии, которые не могут происходить мгновенно. Если потоки энергии однонаправлены, то переходный процесс при приложении постоянного по величине воздействия носит монотонный характер. Таков, например, процесс нарастания тока в обмотке возбуждения двигателя постоянного тока при подаче напряжения на эту обмотку (рис.8.2,а). Процесс изменения тока во времени при подаче напряжения на обмотку описывается дифференциальным уравнением приводя который к нормализованному виду с учетом (8.2), получим: где Iуст – установившееся значение тока возбуждения, или в операторной форме, заменяя символ дифференцирования d/dt на оператор р i(Тэр+1) = Iуст (8.5) Решение этого уравнения будет при = 0. 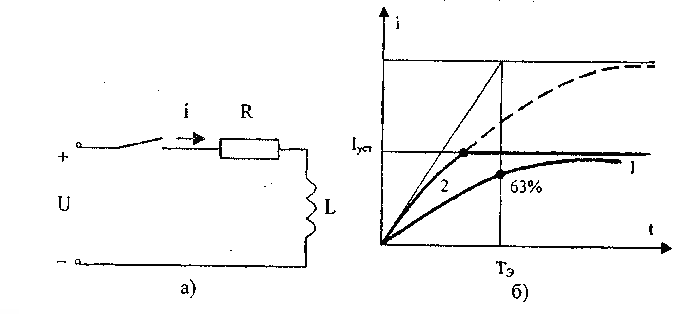 Рис.8.2. Переходные характеристики при включении обмотки возбуждения |