Лекции Электропривод ГМиММ. 1. Роль электропривода в современных машинных технологиях
 Скачать 3.83 Mb. Скачать 3.83 Mb.
|

|
Исходя из особенностей режимов нагрева и охлаждения двигателей различают 8 режимов работы, основными из которых являются: продолжительный S1, кратковременный S2 и повторно-кратковременный S3.
В паспортных данных двигателя указываются номинальная мощность Рн скорость вращения ωн, напряжение Uн ток Iн соответствующие режиму S1.
Графики, характеризующие кратковременный режим работы, показаны на рис.11.4,6.
Стандартные значения ПВ, на которые рассчитываются и выпускаются электродвигатели, предназначенные для работы в режиме S3, составляют 15, 25, 40 и 60%. Максимальная продолжительность цикла не должна превышать 10 мин. Номинальные режимы S4... S5 введены для того, чтобы упростить задачу выбора электродвигателей, работающих в этих режимах. Здесь ограничимся лишь упоминанием этих режимов, повторно-кратковременный режим работы с частыми пусками S4 повторно-кратковременный режим работы с частыми пусками и электрическим торможением - S5; перемежающий режим работы - S6 когда после периода работы электродвигатель не отключается а продолжает работать вхолостую; перемежающий режим работы с частыми реверсами - S7; перемежающий режим работы с двумя и более скоростями - S8. 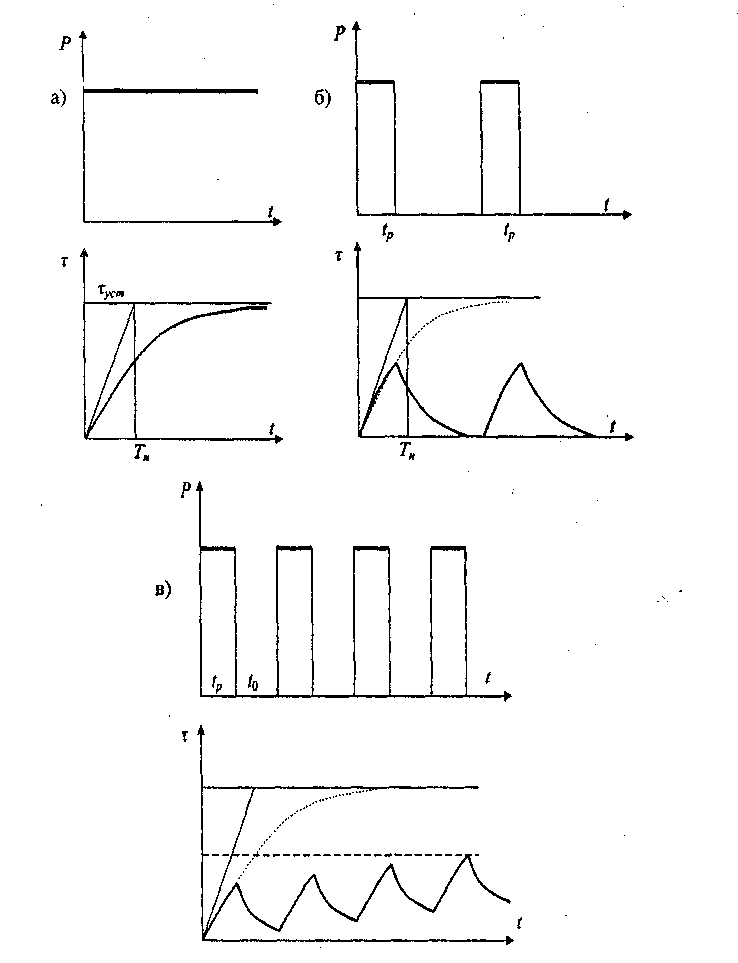 Рис. 11.4. Температурные характеристики двигателя при режимах работы: а) продолжительном S1; б) кратковременном S2; в) повторно - кратковременном S3 Метод эквивалентного тока Потери в двигателях примерно пропорциональны квадрату тока в его обмотках. Зная график тока, протекающего по обмоткам двигателя, можно определить для каждого конкретного режима работы значение тока Iэхарактеризующее его нагрев. Эквивалентный ток Iэ – это такой неизменный по величине ток, который вызывает такой же нагрев электродвигателя, как и реально протекающий изменяющийся по величине ток в соответствии с графиком нагрузки механизма. ΔAcт= ΔAрот·r1/r2  (12.2) (12.2)Условие проверки двигателя на нагрев будет: Iэ≤Iном (12.3) Метод эквивалентного момента Если момент двигателя пропорционален току, то можно пользоваться методом эквивалентного момента. Эквивалентный момент – это такой постоянный момент нагрузки, который вызывает такой же нагрев двигателя, как и реально изменяющийся момент в соответствии с графиком работы механизма.  (12.4) (12.4)Условие правильности выбора двигателя - Мэ<Мн. Этот метод применим для двигателей постоянного тока с независимым возбуждением, для асинхронных двигателей и других, когда момент пропорционален току. Метод эквивалентной мощности Если скорость двигателя изменяется мало и можно считать, что мощность пропорциональна моменту и, следовательно, току, то эквивалентная мощность будет:  (12.5) (12.5)Производить проверку двигателя на нагрев по эквивалентной мощности можно для нерегулируемых по скорости электродвигателей, у которых момент пропорционален току. Условие правильности выбора электродвигателя - Рэ < Рн. Формулы (12.2), (12.4), (12.5) не учитывают условий ухудшения охлаждения у двигателей с самовентиляцией при стоянке во время пауз и при сниженной скорости вращения. С учетом этого обстоятельства можно пользоваться более точной формулой, например, для эквивалентного тока  где β1 = β3 = 0,5 – коэффициент, учитывающий ухудшение условий охлаждения в процессе разгона и торможения двигателя; β0 = 0,3 – коэффициент, учитывающий ухудшение условий охлаждения во время стоянки двигателя. Продолжительный режим S1.
где F, М – сила, момент сопротивления, приведенные к двигателя, Н и Нм; Vн ωн – номинальная линейная и угловая скорости механизма и двигателя соответственно, м/с, с–1; ηп – кпд передачи.
Рн.дв ≥К3Р (12.7) где Рн.дв – номинальная мощность электродвигателя по каталогу; К3=1,05÷1,2 – коэффициент запаса, учитывающий неточности расчета сил сопротивления.
где Мс Мд – статический и динамический моменты сопротивления, Нм; J∑ – приведенный к валу электродвигателя суммарный момент инерции, кгм2; 1п - время пуска. Асинхронные короткозамкнутые электродвигатели проверяются по пусковому моменту Мп > Мсп · К3; Мсп - момент сопротивления при скорости, равной нулю. Кратковременный режим S2
где а = К/Vном– отношение постоянных потерь к номинальным переменным потерям в двигателе. Если отношение tp/Тн ≤ 0,35, электродвигатель проверяют только по перегрузочной способности. Повторно-кратковременный режим
где
В случае, если расчетная ПВ не соответствует стандартной, то эквивалентную мощность приводят к стандартной по формуле 7.3 Энергетические показатели электропривода На долю электропривода приходится около 2/3 всей вырабатываемой электроэнергии, поэтому вопрос о том, насколько эффективно используется эта электроэнергия, имеет огромное техническое и экономическое значение. Электрические приводы питаются (за исключением транспортных или мобильных машин) от промышленной сети переменного тока частотой 50 Гц. Электроприводы потребляют (а при работе в рекуперативном тормозном режиме и отдают) из сети активную мощность. Активная мощность расходуется на совершенствование полезной работы и покрытие потерь во всей электромеханической системе рабочей машины. Анализируя эффективность использования электрической энергии, следует различать энергетическую эффективность самого технологического процесса, который осуществляется рабочей машиной с электроприводом, и эффективность собственно электропривода, характеризуемую его коэффициентом полезного действия - кпд, который представляет собой отношение выходной мощности данного устройства к входной мощности. Кпд определяют также как отношение полезной мощности (или энергии) к затраченной где Поскольку силовая часть электропривода состоит из электродвигательного, передаточного и преобразовательного устройств, то кпд электропривода в целом определяют как произведение кпд этих устройств η = ηдв · ηпер · ηпреоб Кпд электродвигателя есть отношение механической мощности на валу двигателя к потребляемой со стороны обмоток статора (для машин постоянного тока – со стороны якоря). Номинальный кпд асинхронных двигателей мощностью от 0,1-15,0 кВт составляет 0,85-0,9. С ростом мощности номинальный кпд повышается и у крупных высокоскоростных двигателей переменного тока мощностью свыше 1000 кВт может достигать величины 0,97. Кпд электродвигателей существенно зависит от нагрузки на валу двигателя. Для анализа этой зависимости пользуются методом разделения потерь ΔР на постоянные К и переменные V. ΔР = К + V (11.2) Для нерегулируемых по скорости двигателей постоянные потери складываются из:
Переменные потери зависят от квадрата тока в обмотках машины и будут равны:
Потери в роторной цепи согласно (6.8) пропорциональны моменту на валу двигателя и скольжению 3I22r2 = M ·ω0s Ориентировочно можно считать, что потери в обмотках статора относятся к потерям в обмотках ротора в соотношении r1/r2. Тогда переменные потери для асинхронных двигателей будут Мы видим, что при работе с неполной нагрузкой кпд двигателя снижается. Типичная кривая зависимости кпд от загрузки двигателя показана на рис. 11.1. 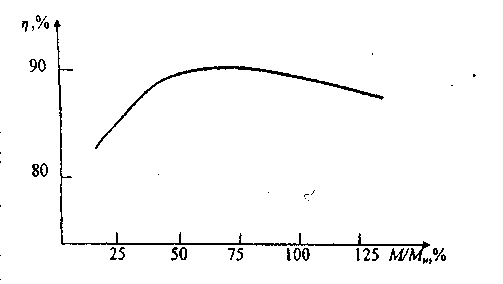 Рис. 11.1. Зависимость кпд асинхронного двигателя от нагрузки (двигатель 4АИ16084) Отсюда следует, что завышение установленной мощности двигателя ведет к снижению его эксплуатационного кпд, т.е. к непроизводительному расходу электроэнергии. Кпд преобразовательного устройства, если последнее выполнено на базе силовых на базе силовых полупроводниковых приборов, довольно велико. Потери в преобразователе определяются, главным образом, величиной прямого падения напряжения в полупроводниковом приборе. В среднем можно считать, что ΔU= 2В, для мостовых схем – 4,0В. Таким образом, номинальные потери для преобразователей напряжением 440В составляют 1%, а для преобразователей напряжением 220В – 2%. С учетом потерь в реактивных элементах полупроводниковых преобразователей можно полагать, что их кпд составляет 0,95-0,98. Потери в механическом передаточном устройстве: редукторе, трансмиссии и др., определяются главным образом, силами трения. Величина этих потерь, а, следовательно, кпд механической передачи зависит от типа используемых подшипников, класса обработки зубчатых колес, систем смазки и др. Кпд механической передачи не остается постоянным, а существенно зависит от величины передаваемого момента. Под кпд рабочей машины понимают произведение кпд электропривода ηэп на кпд собственно рабочей машины. Так, для вентиляторной установки Здесь Q – производительность вентилятора, м /с; Н – напор, Па; ηвен – аэродинамический кпд вентилятора; Рзатр – затраченная электрическая мощность. Если рабочая машина работает в энергетически постоянном режиме, то ее энергоемкость, выражаемая через кпд, определяется по (11.4). Если рабочая машина работает циклически (например, лифты, грузоподъемные механизмы, продольно-строгальные станки и многие другие), то более правильно кпд рабочей машины определять по затратам энергии за цикл работы где  –соответственно полезная работа за цикл, затраченная энергия за цикл, потери энергии за рабочий цикл. В сети переменного тока, питающей электропривод, циркулирует реактивная мощность. Негативным результатом наличия реактивной мощности является загрузка питающей сети реактивным током, не создающим работы. Величина реактивной мощности оценивается величиной cosφ, где под углом φ понимается фаза сдвига первой гармоники тока от первой гармоники напряжения. У асинхронных короткозамкнутых двигателей номинальный cosφ составляет примерно 0,7-0,8. Недогрузка асинхронного двигателя ведет к дальнейшему снижению cosφ. Cosφэп=Cosφэд·Cosφпр В приводах по системе ТП-Д (см. раздел 5.3) cosφ = cosа , что определяется запаздыванием, устанавливаемым системой импульсно-фазового управления, открывания тиристоров. Поэтому в приводах ТП-Д при высокой скорости вращения cosφ в питающей сети переменного тока будет высоким (0,8-0,9), по мере снижения скорости, когда угол а растет, cosφ будет уменьшаться. При включении привода ТП-Д имеют место броски реактивной мощности. В современных системах регулируемого электропривода стремятся использовать неуправляемые выпрямители, осуществляя регулирование величины напряжения, подаваемого к обмоткам двигателя, широтно-импульсными методами (см. например, схемы рис.5.29. 6.12). В этом случае cosφ в питающей сети будет не ниже 0,95. С точки зрения компенсации реактивной мощности многих потребителей электроэнергии эффективно использование для нерегулируемых электроприводов синхронных двигателей большой мощности, которые при перевозбуждении способны генерировать реактивную мощность для ее компенсации в пределах энергосистемы данного предприятия. |