Лекции Электропривод ГМиММ. 1. Роль электропривода в современных машинных технологиях
 Скачать 3.83 Mb. Скачать 3.83 Mb.
|

|
Практический диапазон регулирования скорости в каскадных схемах обычно не превышает двух. Вызвано это тем обстоятельством, что по мере роста диапазона регулирования скорости и тем самым скольжения АД требуется увеличивать установленную мощность всех устройств в его роторной цепи. Так, при диапазоне регулирования. равным двум установленная мощность машинно-вентильного электрического каскада составляет 250% номинальной мощности АД, из них основной АД —100%, выпрямитель, вспомогательная машина и синхронный генератор —по 50%. Плавность регулирования скорости АД в каскадных схемах высокая и определяется плавностью изменения ЭДС вспомогательной машины или ПЧ. Регулирование скорости производится вниз от естественной характеристики, а некоторые специальные каскадные схемы обеспечивают и двухзонное регулирование скорости. Несмотря на значительные капитальные затраты при реализации данного способа регулирования скорости, применение каскадных схем за счет полезного использования энергии скольжения оказываются экономически целесообразным для мощных асинхронных ЭП с небольшим (не более 2—3) диапазоном регулирования скорости. К ним относятся ЭП мощных вентиляторов, центробежных насосов, компрессоров, воздуходувок, испытательных установок. 4.4 Асинхронный электропривод с частотным регулированием скорости Возможность частотного регулирования скорости асинхронного двигателя-регулирование путем изменения частоты питающего напряжения – вытекает из того обстоятельства, что скорость вращения электромагнитного поля статора пропорциональна частоте питающего напряжения Следует также учесть, что поскольку с изменением частоты питающего напряжения изменяется и величина потока двигателя Ф1 то в большинстве случаев одновременно с изменением частоты питающего напряжения необходимо регулировать и его амплитуду. Необходимость регулирования напряжения при уменьшении частоты вниз от номинальной связана с тем, что из-за уменьшения индивидуального сопротивления обмоток двигателя ток намагничивания будет возрастать, что приведет к насыщению магнитопровода двигателя и его перегреву. Регулирование напряжения следует производить таким образом, чтобы скольжение двигателя было минимальным. 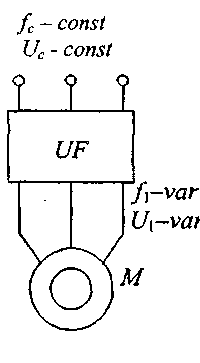 Рис.6.2. Схема включения асинхронного двигателя с питанием от преобразователя частоты Для реализации способа частотного регулирования асинхронный короткозамкнутый двигатель включается в питающую сеть с параметрами Ucи fc через преобразователь частоты UF (см.рис.6.2). В качестве преобразователей частоты в настоящее время используются, в основном, полупроводниковые преобразователи частоты. Существующие вентильные регулирование скорости изменением частоты реализуется с помощью полупроводниковых преобразователей частоты которые можно разделить на две группы: 1 – преобразователи с непосредственной связью питающей сети и нагрузки, сокращенно НПЧ; 2 – преобразователи частоты с промежуточным звеном постоянного тока. Преобразователь частоты с непосредственной связью включается в статорную цепь асинхронного двигателя и служит для преобразования напряжения стандартной частоты в регулируемое в определенных пределах напряжение по величине и частоте. Преобразователи частоты с непосредственной связью обычно представляют собой три согласованно работающих реверсивных тиристорных преобразователя постоянного тока. Блок схема непосредственного преобразователя частоты представлена на рис.6.7. 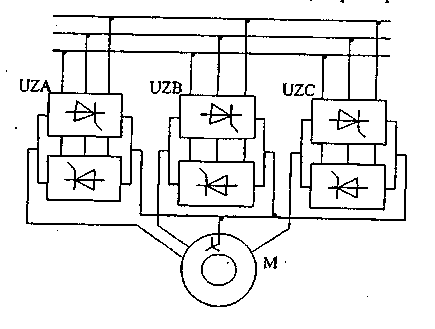 Рис.6.7. Блок-схема преобразователя частоты с непосредственной связью Каждая фаза асинхронного двигателя питается от своего реверсивного преобразователя. Преобразователи частоты с непосредственной связью по схеме рис.6.7 дают возможность при частоте питания 50Гц получать выходную частоту в пределах 0-20Гц. Поэтому асинхронные электроприводы данного типа чаще всего применяются для тихоходных безредукторных электроприводов средней и большой мощности. Основным достоинством преобразователей частоты с непосредственной связью является естественная коммутация вентилей под действием напряжения питающей сети, как это происходит в управляемых тиристорных преобразователях (выпрямителях), используемых в приводе постоянного тока. Благодаря возможности перевода преобразователя из выпрямительного в инверторный режим, в рассматриваемых схемах возможно торможение асинхронного двигателя с отдачей энергии торможения в сеть (рекуперативное торможение). Механические характеристики асинхронного электропривода с преобразователем частоты с непосредственной связью показаны на рис.6.9. 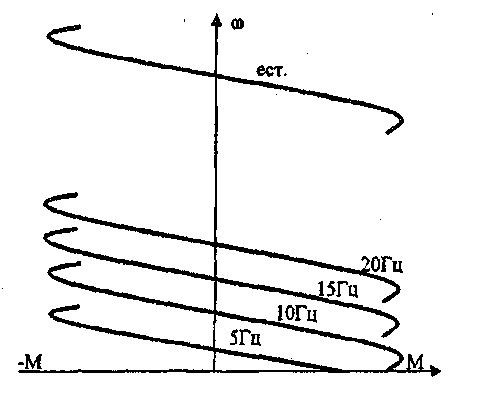 Рис.6.9. Механические характеристики электропривода НПЧ-АД 2. Преобразователи частоты со звеном постоянного тока В этой системе используются преобразователи частоты с промежуточным звеном постоянного тока. Блок схема такого преобразователя представлена на рис.6.10. 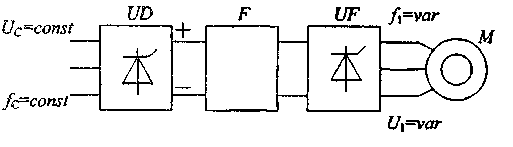 Рис.6.10. Блок-схема электропривода с преобразователем частоты с промежуточным звеном постоянного тока Переменное напряжение промышленной сети сначала выпрямляется посредством регулируемого или нерегулируемого выпрямителя UD, а затем подается на автономный инвертор, преобразующий постоянное напряжение (или ток) в напряжение (или ток) регулируемой частоты и величины. Регулирование величины напряжения (или тока) промежуточного звена постоянного тока может производиться управляемым выпрямителем UD , либо (в инверторах напряжения) в качестве первого звена используется неуправляемый выпрямитель, а регулирование напряжения осуществляется инвертором методом широтно-импульсной модуляции. В первом случае функции управления четко разделены: выпрямитель управляет величиной тока или напряжения, а инвертор - значением выходной частоты преобразователя. Во втором случае обе этих функции возлагаются на инвертор. Важным узлом преобразователей с промежуточным звеном постоянного тока является фильтр F. Этот фильтр выполняет две функции: сглаживает пульсации выпрямленного напряжения (или тока) и служит устройством для накопления и отдачи энергии, что необходимо для обеспечения циркуляции реактивной мощности между обмотками асинхронного двигателя и фильтром. Поскольку на входе преобразователя установлен полупроводниковый выпрямитель, то циркуляция реактивной мощности между асинхронным двигателем и сетью невозможна. Преобразователи частоты по типу автономного инвертора, используемые в электроприводах, позволяют получать выходную частоту от долей герца до нескольких сотен Гц. Верхний предел ограничивается возможной частотой коммутации вентилей инвертора, нижний - качеством выходного напряжения или тока; при несинусоидальной форме тока в обмотках двигателя при малых частотах нарушается равномерность вращения ротора. При частотном регулировании величина относительного скольжения sj зависит как от разности скоростей вращающегося электромагнитного поля и ротора – абсолютного скольжения sабс = ω0 – ω, так и от относительного значения f 1 частоты питающего напряжения С учетом (6.2) 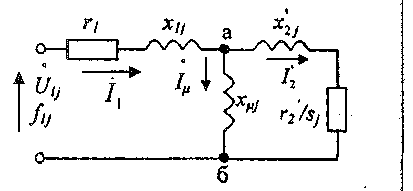 Рис.6.3. Схема замещения асинхронного двигателя Для анализа электромеханических характеристик двигателя при частотном регулировании рассмотрим Т-образную схему замещения двигателя (рис.6.3). В отличие от ранее приведенной схемы замещения в данном случае приходится учитывать, что реактивные сопротивления двигателя зависят от частоты питающего напряжения и изменяются с изменением частоты.  (6.13) (6.13)где  Механические характеристики, соответствующие частотному регулированию при выполнении соотношения (6.13) и r1 = 0, показаны на рис.6.4 (сплошными линиями). В первом приближении пропорциональное регулирование напряжения в соответствии с соотношением (6.13) обеспечивает работу двигателя с постоянным потоком. 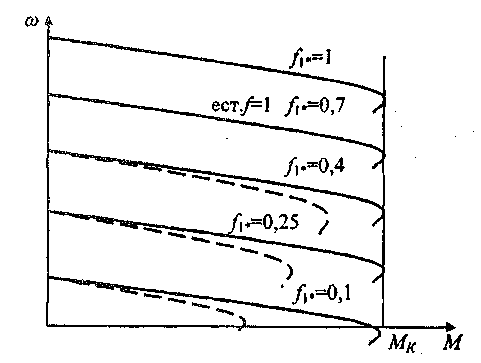 Рис.6.4. Механические характеристики асинхронного двигателя при ЭЭ частотном регулировании при U1*/f1*=const В действительности при малых значениях частоты (f1* < 0,3) падение напряжения на сопротивлении r1 существенно снижает величину напряжения, прикладываемого к контуру намагничивания (напряжение Uаб на рис.6.5). Uаб = U1 – I1r1 Падение напряжения на индуктивном сопротивлении х1 уменьшается с уменьшением частоты и поэтому не оказывает такого влияния на напряжение Uаб, как падение напряжения на активном сопротивлении r1 которое не зависит от частоты. 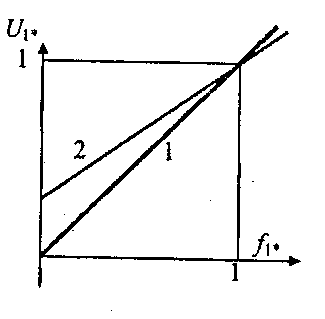 Рис.6.5. Зависимость величины напряжения питания от частоты 1 – U1* = f1* , 2 – U1= U1нf1* + I1r1(1 – f1*). При более точном расчете с учетом падения напряжения на сопротивлении r1 механические характеристики имеют вид, показанный на рис.6.4 пунктиром. При малых значениях частоты, когда относительное значение падения напряжения на сопротивлении r1 становится значимым, поток двигателя уменьшается и соответственно уменьшается максимальный момент Мк, что следует также из формулы (6,11). Поэтому для того чтобы регулировать скорость двигателя, сохраняя максимальный момент двигателя постоянным, нужно величину напряжении уменьшать в меньшей степени, чем уменьшается частота, примерно в соотношении: U1 = U1нf1* + I1r1 (1 – f1*) (6.14) Такой способ регулирования напряжения называют «пропорциональное регулирование с I · r компенсацией». Зависимость U1* =f(f1*) показана на рис.6.5. При регулировании напряжения в соответствии с соотношением (6.14) механические характеристики будут иметь вид, показанный на рис.6.4 сплошными линиями.
Полная механическая характеристика асинхронного двигателя во всех квадрантах поля Мs, представлена на рис.3.14. Асинхронный двигатель может работать в трех тормозных режимах: рекуперативного торможения, динамического торможения и торможения противовключением; специфическим тормозным режимом является также конденсаторное торможение. 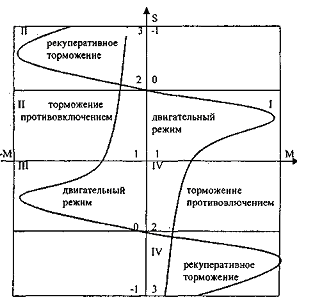 Рис.3.14. Полная механическая характеристика асинхронного двигателя Рекуперативное генераторное торможение возможно, когда скорость ротора выше скорости вращения электромагнитного поля статора, чему соответствует отрицательное значение скольжения ω> ω0; s < 0 . Для того, чтобы ротор двигателя перешел синхронную скорость и разогнался до скорости выше синхронной, к его валу должен быть приложен внешний совпадающий со знаком скорости вращающий момент. Это может быть, например, в приводе подъемной лебедки в режиме спуска груза. Механическая характеристика асинхронного двигателя в режиме рекуперативного торможения идентична (с учетом угловой симметрии) характеристике двигателя в двигательном режиме. Расчет характеристик может производиться по формуле Клосса (3.27), Максимальный момент в режиме рекуперативного торможения несколько выше, чем максимальный момент в двигательном режиме. Для рекуперативного режима  Несколько большая величина максимального момента в генераторном режиме объясняется тем, что потери в статоре (на сопротивлении r1) в двигательном режиме уменьшают момент на валу, а в генераторном режиме момент на валу должен быть больше, чтобы покрыть потери в статоре. 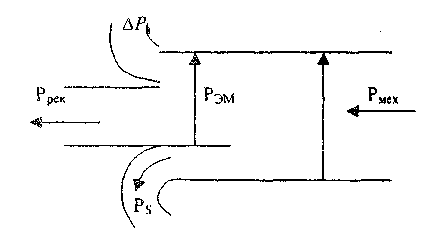 Рис.3.15. Энергетическая диаграмма асинхронного двигателя в режиме рекуперативного торможения Энергетический баланс в режиме рекуперативного генераторного торможения определяется следующим (рис.3.15). Механическая мощность, поступающая на вал двигателя, преобразуется в электромагнитную мощность вращающегося поля Рэм и электрическую мощность, трансформируемую в роторную цепь двигателя. По аналогии с (3.35) получим Рмех = Рэм – Рs = Мω0 – М ω0s Электромагнитная мощность, за исключением потерь в статоре, отдается в питающую сеть, а мощность скольжения рассеивается в роторной цепи. Отметим, что в режиме рекуперативного торможения асинхронный двигатель генерирует и отдает в сеть активную мощность, а для создания электромагнитного поля асинхронный двигатель и в режиме генератора должен обмениваться с сетью реактивной мощностью. Поэтому асинхронная машина не может работать автономным генератором при отключении от сети. Возможно, однако, подключение асинхронной машины к конденсаторным батареям, как к источнику реактивной мощности (см. рис.3.19).  Рис.3.16. Схемы подключения асинхронного двигателя в режиме динамического торможения Способ динамического торможения характеризуется тем, что статорные обмотки отключаются от сети переменного тока и подключаются к источнику постоянного напряжения (см. рис.3.16). При питании обмоток статора постоянным током создается неподвижное в пространстве электромагнитное поле, т.е. скорость вращения поля статора ω0дт = 0. Скольжение будет равно sдт = – ω/ ω0н где ω0н – номинальная угловая скорость вращения поля статора. Вид механических характеристик (см. рис.3.17) подобен характеристикам в режиме рекуперативного торможения. Исходной точкой характеристик является начало координат. Регулировать интенсивность динамического торможения можно изменяя величину тока возбуждения Iдт в обмотках статора. Чем выше ток, тем больший тормозной момент развивает двигатель. При этом, однако, нужно учитывать, что при токах Iдт >I1н начинает сказываться насыщение магнитной цепи двигателя.  Рис.3.17. Механические характеристики асинхронного двигателя в режиме динамического торможения Для асинхронных двигателей с фазным ротором регулирование тормозного момента может производиться также введением дополнительного сопротивления в цепь ротора. Эффект от введения добавочного сопротивления аналогичен тому, которое имеет место при пуске асинхронного двигателя: благодаря улучшению cosφ2 повышается критическое скольжение двигателя и увеличивается тормозной момент при больших скоростях вращения Работу асинхронного двигателя в режиме динамического торможения можно рассматривать как работу трехфазного асинхронного двигателя при питании его постоянным током, т.е. током при частоте f1|=0. Второе отличие заключается в том, что обмотки статора питаются не от источника напряжения, а от источника тока. Следует также иметь в виду, что в схеме динамического торможения ток протекает (при соединении обмоток в звезду) не по трем, а по двум фазным обмоткам. Энергетически в режиме динамического торможения асинхронный двигатель работает как синхронный генератор, нагруженный на сопротивление роторной цепи двигателя. Вся механическая мощность, поступающая на вал двигателя, при торможении преобразуется в электрическую и идет на нагрев сопротивлений роторной цепи. Возбуждение асинхронной машины в режиме динамического торможения может осуществляться не только подачей постоянного тока в обмотки статора машины, но также в режиме самовозбуждения путем подключения конденсаторов к цепям статора асинхронной машины, как это показано на рис. 3.19. Такой способ торможения называют конденсаторным торможением асинхронных двигателей. По энергетической сущности этот вид торможения идентичен динамическому торможению, т.к. энергия, поступающая с вала, преобразуется в электрическую и выделяется в виде потерь в роторе двигателя.  Рис.3.19. Схема включения асинхронного двигателя в режиме динамического торможения с самовозбуждением от конденсаторов Процесс самовозбуждения асинхронного двигателя происходит следующим образом. Под действием остаточного потока ротора в обмотках статора наводится э.д.с,, под действием которой возникает намагничивающий ток, протекающий через конденсаторы. При этом увеличивается поток машины, следовательно, наводимая э.д.с. и ток намагничивания. Верхняя и нижняя границы режима самовозбуждения и величина тормозного момента зависят от величины емкости конденсаторов. Данный способ торможения применяется для приводов малой мощности (до 5кВт), т.к. требует установки конденсаторов значительного объема. |