Лекции Электропривод ГМиММ. 1. Роль электропривода в современных машинных технологиях
 Скачать 3.83 Mb. Скачать 3.83 Mb.
|

|
Тема 3. Электромеханические свойства асинхронных двигателей 3. 1. Принцип работы асинхронного двигателя Наиболее распространенными электрическими двигателями в промышленности, сельском хозяйстве и во всех других сферах применения являются асинхронные двигатели. Они являются основным средством преобразования электрической энергии в механическую. Асинхронный двигатель является трехфазной индукционной электрической машиной переменного тока. На статоре двигателя располагаются три распределенные обмотки, сдвинутые друг относительно друга на 120°, если число пар полюсов машины 2рп = 2, как это показано на рис.3.1, а. Если число пар полюсов (рп), образуемых обмотками, более одного, то соответственно увеличивается число секций обмотки, и они будут сдвинуты геометрически друг относительно друга уже не на1200,а на120°/рп. 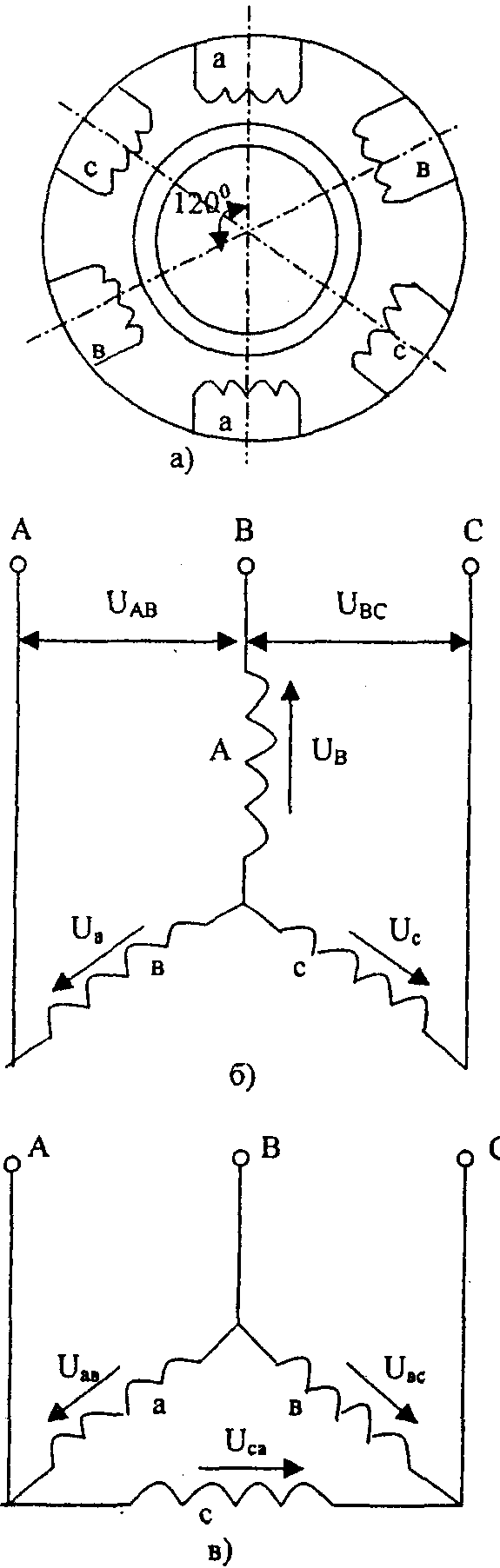 Рис.3.1. Схемы включения обмоток асинхронного двигателя Фазные статорные обмотки асинхронного двигателя соединяют в звезду (рис.3.1, б) или в треугольник (рис.3.1, в). Обычно асинхронные двигатели малой и средней мощности сконструированы на номинальное напряжение 380/220В. При этом если напряжение питания 380В, то обмотки соединяют в звезду (/\), если напряжение питания 220В, то обмотки соединяют в треугольник (Δ). В обоих случаях напряжение, прикладываемое к фазной обмотке статора двигателя, равно 220В. Работа асинхронного двигателя основана на формировании силового электромагнитного поля статора. Благодаря пространственному сдвигу обмоток на 120°/рп градусов и временному сдвигу трех фаз напряжения, прикладываемого к обмоткам, (фазы напряжений UA, UB, и UС сдвинуты на 120 электрических градусов - 2π/3 радиан), результирующий вектор магнитодвижущих сил где f1 - частота синусоидального тока в обмотках статора; pn - число пар полюсов машины. Поскольку воздушный зазор равномерен, машина симметрична и обмотки статора равномерно распределены, магнитодвижущие силы создают магнитный поток, результирующий вектор которого вращается в пространстве со скоростью ω0. При изменении порядка чередования фаз напряжения, подводимого к обмоткам двигателя (если, например, поменяем местами фазы В и С на рис.3.1, б, в), результирующий вектор потокосцепления будет вращаться против часовой стрелки, т.е. изменится направление вращения магнитного поля, образуемого токами в обмотках статора. Если число пар полюсов двигателя больше единицы, то увеличивается число секций обмоток, располагаемых по окружности статора. Так, если число пар полюсов рп=2, то все три фазные обмотки расположены на одной половине окружности статора, соответственно и на второй его половине. В этом случае за время одного периода питающего напряжения вектор м.д.с. статора меньше, чем у машин с рП = 1. Следовательно, скорость вращения магнитного поля статора ω0(ее также называют синхронной скоростью) обратно пропорциональна числу пар полюсов машины и будет в согласно (3.3) соответствовать значениям, указанным в таблице 3.1. Таблица 3.1 Зависимость скорости вращения асинхронных двигателей от числа пар полюсов
В зависимости от конструкции ротора асинхронного двигателя различают асинхронные двигатели с фазным ротором и с короткозамкнутым ротором. В двигателях с фазным ротором на роторе располагается трехфазная распределенная обмотка, соединенная обычно в звезду, концы обмоток соединены с контактными кольцами, через которые электрические цепи ротора выводятся из машины для подключения к пусковым сопротивлениям с последующим закорачиванием обмоток. В короткозамкнутых двигателях обмотка выполнена в виде беличьей клетки - стержней, замкнутых накоротко с двух сторон кольцами. Несмотря на специфическое конструктивное устройство, беличью клетку также можно рассматривать как трехфазную обмотку, замкнутую накоротко. Электромагнитный момент М в асинхронном двигателе создается благодаря взаимодействию вращающегося магнитного поля статора Ф с активной составляющей тока ротора М = ЗкФI2а(3.3) Ток ротора возникает благодаря э.д.с. Е2, которая индуктируется в обмотках ротора вращающимся магнитным полем. Когда ротор неподвижен, асинхронный двигатель представляет собой трехфазный трансформатор с обмотками замкнутыми накоротко или нагруженными на пусковое сопротивление. Возникающая при неподвижном роторе в его обмотках э.д.с. называется номинальной фазной э.д.с. ротора Е2н. Эта э.д.с. приблизительно равна фазному напряжению статора, деленному на коэффициент трансформации КT Величина э.д.с. ротора Е2 при вращающемся двигателе и частота этой э.д.с. (а значит, и частота тока в обмотках ротора) f2 зависят от частоты пересечения вращающимся полем проводников обмотки ротора (в короткозамкнутом двигателе – стержней). Эта частота определяется разностью скоростей поля статора ω0 и ротора ω. Эта разность называется абсолютным скольжением Sабс = ω0 – ω (3.5) При анализе режимов работы асинхронного двигателя с постоянной частотой питающего напряжения (50Гц) обычно пользуются относительной величиной скольжения Когда ротор двигателя неподвижен, s =1. Наибольшая величина э.д.с. ротора при работе в двигательном режиме будет при неподвижном роторе (Е2п); по мере увеличения скорости (уменьшении скольжения) э.д.с. Е2 будет уменьшаться Е2 = Е2н · s (3.7) Аналогично частота э.д.с. и тока ротора f2 при неподвижном роторе будет равна частоте тока статора f1, и по мере увеличения скорости будет уменьшаться пропорционально скольжению f2 = f1 · s(3-8) В номинальном режиме скорость ротора незначительно отличается от скорости поля, и номинальное скольжение составляет для двигателей общего применения мощностью 1,5-200кВт всего 2-3%, а для двигателей большей мощности порядка 1%. Соответственно в номинальном режиме э.д.с. ротора составляет 1-3% от номинального значения этой э.д.с. при s = 1. Частота тока ротора в номинальном режиме будет составлять всего 0,5-1,5Гц. При s=0, когда скорость ротора равна скорости поля, э.д.с. ротора Е2и ток ротора I2будут равны нулю, момент двигателя также будет равен нулю. Этот режим является режимом идеального холостого хода. Зависимость частоты э.д.с. и тока ротора от скольжения определяет своеобразие механических характеристик асинхронного двигателя. 3.2. Механическая характеристика асинхронного двигателя Рассмотрим работу асинхронного двигателя с фазным ротором, обмотки которого замкнуты накоротко. Как уже указывалось, момент двигателя пропорционален потоку Ф и активной составляющей тока ротора I2а, приведенного к статору. Поток, создаваемый обмотками, зависит от величины и частоты питающего напряжения Ток ротора I2равен где Z2 – полное сопротивление фазы обмотки ротора. Следует учитывать, что индуктивное сопротивление обмотки ротора х2является величиной переменной, зависящей от частоты тока ротора, а, следовательно, от скольжения х2= 2πf2L2= 2πf1·sL2 При неподвижном роторе при s=1индуктивное сопротивление обмотки ротора наибольшее. По мере роста скорости (уменьшении скольжения) индуктивное сопротивление ротора х2 уменьшается и при достижении номинальной скорости составляет всего 1-3% от величины сопротивления при s=1. Обозначив X2s=Х2ном, Х2 = Х2номS (3.11) Тогда  (3.12) (3.12)Активная составляющая тока ротора где  (3.14) (3.14) Приведем параметры цепи ротора к обмотке статора с учетом коэффициента трансформации кT= U1 /Е2н. Приведение параметров производится на основе сохранения равенства мощности. Е'2= Е2·кT; С учетом (3.15)  и и  (3.16) (3.16)Разделив числитель и знаменатель формулы (3.16) на s, получим   Рис.3.3. Схемы замещения асинхронного двигателя Проведенная математическая операция - деление числителя и знаменателя на s, конечно, не изменяет справедливость равенства (3.17), но носит формальный характер, что нужно учитывать при рассмотрении этого соотношения. В действительности, как это следует из исходной формулы (3.12), от скольжения зависит величина индуктивного сопротивления ротора х2, а активное сопротивление r2остается постоянным. Использование выражения (3.17) позволяет по аналогии с трансформатором составить схему замещения асинхронного двигателя, которая представлена на рис.3,3,а. Для анализа нерегулируемого электропривода эту схему можно упростить, перенеся контур намагничивания на зажимы двигателя. Упрощённая П-образная схема замещения представлена на рис. 3.3,6. Исходя из этой схемы, ток ротора будет равен:  (3.18) (3.18)где хк= х1 + х2н – индуктивное сопротивление короткого замыкания. Активная составляющая тока ротора будет:  (3.19) (3.19)Подставляя (3.9) и (3.19) в (3.3), получим выражение для момента асинхронного двигателя  (3.20) (3.20)Это выражение отображает механическую характеристику асинхронного двигателя s = f (M). 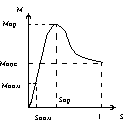 Рис.3.4. Примерная механическая характеристика асинхронного двигателя с фазным ротором, Характеристика асинхронного двигателя с фазным ротором, обмотки которого замкнуты накоротко, представлена на рис. 3.4. Приравняв производную dM/ds= 0, найдем максимальное значение момента асинхронного двигателя Мки соответствующее ему значение критического скольжения sK.  (3.23) (3.23)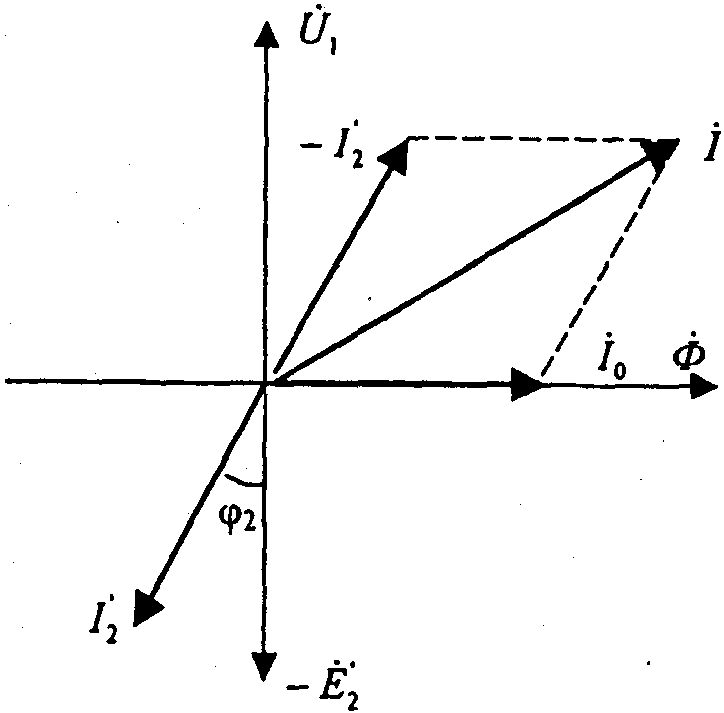 Рис.3.5. Упрощенная векторная диаграмма асинхронного двигателя Отношение максимального момента к номинальному называется перегрузочной способностью асинхронного двигателя где sкрит – критическое скольжение; знак (+) – означает, что эта величина относится к двигательному режиму; знак (–) – к генераторному режиму рекуперативного торможения. С учетом (3.23) и (3.24) формулу механической характеристики (3.20) можно преобразовать к более удобному для пользования выражению – формуле Клосса. где а = r1/r’2 Для двигателей мощностью более 15кВт сопротивление r1 невелико и при частоте 50Гц значительно меньше хк. Поэтому в приведенных выше выражениях величиной r1 можно пренебречь. Тогда Формула Клосса, если пренебречь r1 будет иметь вид: По формулам (3.28) и (3.29) можно рассчитать механическую характеристику асинхронного двигателя, пользуясь его паспортными данными, зная номинальный момент Мн, номинальное скольжение sHи перегрузочную способность двигателя λ. Проанализируем особенности механической характеристики асинхронного двигателя (см. рис.3.4). Она носит нелинейный характер и состоит из двух частей. Первая – рабочая часть – в пределах скольжения от 0 до sK. Эта часть характеристики близка к линейной и имеет отрицательную жесткость. Здесь момент, развиваемый двигателем, примерно пропорционален току статора I1и ротора I2. Так как на этой части характеристики s<sк, то второе слагаемое знаменателя в формуле (3.29) существенно меньше первого, и им можно пренебречь. Тогда рабочую часть механической характеристики можно приближенно представить в линейной форме, где момент пропорционален скольжению. Вторая часть механической характеристики асинхронного двигателя при скольжениях, больших sK (s>sк) криволинейная, с положительным значением жесткости β. Несмотря на то, что ток двигателя по мере роста скольжения увеличивается, момент, напротив, уменьшается. Если обмотки ротора асинхронного двигателя с фазным ротором во внешней цепи замкнуты накоротко, то пусковой ток такого двигателя (при ω = 0 и s=1) будет очень большим и превысит номинальный в 10-12 раз. В то же время пусковой момент составит порядка 0,4-0,5 номинального., Для короткозамкнутых двигателей пусковой ток будет (5,5-7,0) Iн, а пусковой момент (0,9-1,3) Мн. 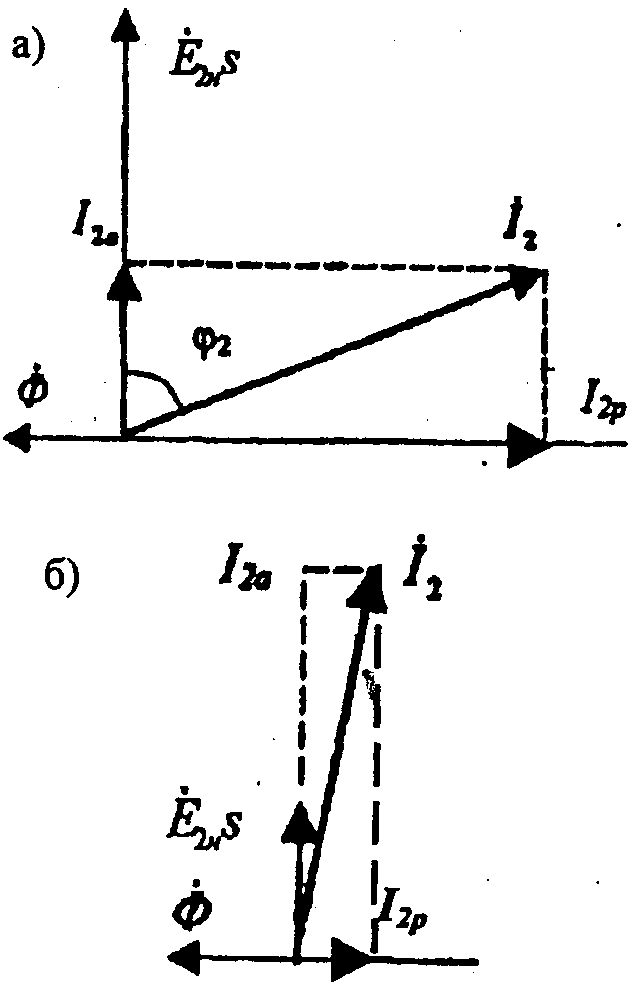 Рис.3.6. Векторная диаграмма цепи ротора асинхронного двигателя: а - при большом скольжении; б - при малом скольжении. Для объяснения такого несоответствия между величинами пускового тока и момента рассмотрим векторные диаграммы цепи ротора (рис.3.6) для двух случаев: а) когда скольжение велико (пусковая часть характеристики); б) когда скольжение мало (рабочая часть характеристики). При пуске, когда s=l, частота тока ротора равна частоте питающей сети 50Гц). Индуктивное сопротивление обмотки ротора (см.3.11) велико и существенно превосходит активное сопротивление ротора r2, ток отстает от э.д.с. ротора на большой угол φ2, т.е. ток ротора, в основном, реактивный. Поскольку э.д.с. ротора в этом случае будет велика E2S=1= Е2н, то и пусковой ток будет очень большим, однако из-за малого значения cosφ2 активная составляющая тока ротора I2a будет невелика, а, следовательно, момент, развиваемый двигателем, будет также невелик. |