Лекции Электропривод ГМиММ. 1. Роль электропривода в современных машинных технологиях
 Скачать 3.83 Mb. Скачать 3.83 Mb.
|

|
Торможение противовключением может быть в двух случаях:
В обоих случаях электромагнитное поле статора и ротор двигателя вращаются в разные стороны. Скольжение двигателя в режиме противовключения всегда больше 1 В первом случае (см.рис.3.20) двигатель, работавший в т.1, после изменения порядка чередования фаз двигателя переходит в тормозной режим в т. 1, и скорость привода быстро снижается под действием тормозного момента Мт и статического момента Мс. При замедлении до скорости, близкой к нулю, двигатель необходимо отключить, иначе он будет разгоняться в противоположном направлении вращения. Во втором случае после снятия механического тормоза двигатель, включенный в направлении вверх, под действием силы тяжести спускаемого груза будет вращаться в противоположном направлении со скоростью, соответствующей точке 2. Работа в режиме противовключения под действием протягивающего груза возможна при использовании двигателей с фазным ротором. При этом в цепь ротора вводится значительное добавочное сопротивление, которому соответствует характеристика 2 на рис.3.20. 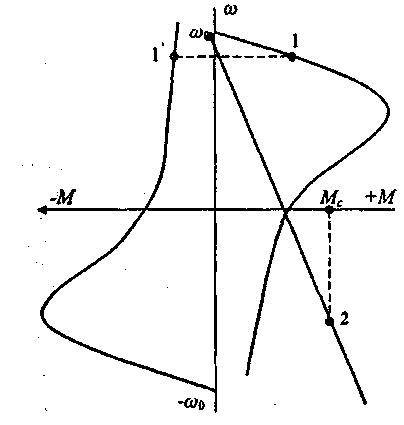 Рис.3.20. Режим противовключения асинхронного двигателя 1, Г - естественные механические характеристики при включении «вперед» и «назад» 2 - механическая характеристика двигателя с фазным ротором со включенным добавочным сопротивлением в цепь ротора. Энергетически режим противовключения крайне неблагоприятен. Ток в этом режиме для асинхронных короткозамкнутых двигателей превосходит пусковой, достигая 10-кратного значения. Потери в роторной цепи двигателя складываются из потерькороткого замыкания двигателя и мощности, которая передается на вал двигателя при торможении ΔРsnв = Мтω0 + Мт ω0 Для короткозамкнутых двигателей режим противовключения возможен только в течение нескольких секунд. При использовании двигателей с фазным ротором в режиме противовключения обязательно включение в цепь ротора добавочного сопротивления. В этом случае потери энергии остаются такими же значительными, но они выносятся из объема двигателя в роторные сопротивления. Лекция №5 Электромеханические характеристики синхронных электродвигателей 5.1 Принцип работы синхронного двигателя Для нерегулируемых электроприводов большой мощности (свыше 160кВт) широко применяются синхронные электродвигатели с электромагнитным возбуждением. Схема включения такого двигателя показана на рис.3.23. Конструкция статора синхронного двигателя аналогична конструкции статора асинхронного двигателя. Токи, протекающие по трехфазной обмотке статора, создают намагничивающие силы, результирующий вектор которых образует вращающееся в пространстве электромагнитное поле статора Ф,. Скорость вращения поля статора равна согласно (3.3) и является рабочей скоростью синхронного двигателя. На роторе синхронного двигателя расположена обмотка возбуждения, которая питается постоянным током от независимого регулируемого источника напряжения - возбудителя. Ток возбуждения создает электромагнитное поле Ф0, неподвижное относительно ротора и вращающееся в установившемся режиме вместе с ротором со скоростью а>0. Магнитные силовые линии поля ротора сцепляются с вращающимся синхронно с ним электромагнитным полем статора. Взаимодействие полей статора и ротора создает электромагнитный момент на валу синхронной машины. 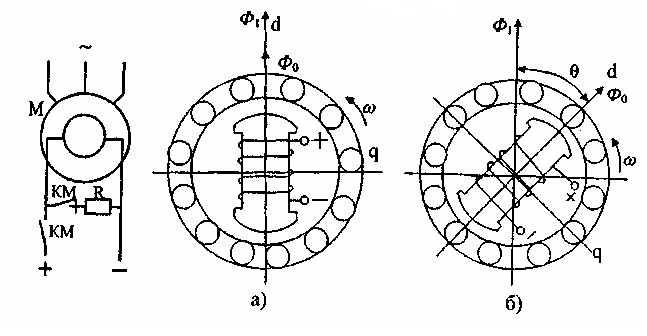 Рис.3.23. Схе- Рис.3.24. Пространственные векторы электро- ма включения магнитных полей синхронного двигателя синхронного а) идеальный холостой ход; двигателя б) при нагрузке на валу При отсутствии нагрузки векторы поля статора Ф1 и поля ротора Ф0 совпадают в пространстве (см. рис.3.24,а) и совместно вращаются со скоростью ω0. При появлении на валу двигателя момента сопротивления векторы Ф1, и Ф0 расходятся (как бы растягиваются подобно пружине) на угол θ, называемый углом нагрузки, причем, если вектор Ф0 отстает от вектора Ф1 (см. рис. 3.24,6), то синхронная машина работает в двигательном режиме и электромагнитный момент на ее валу положителен. Если синхронная машина работает генератором, приводимым во вращение первичным двигателем, то вектор поля ротора опережает вектор поля статора на угол (–θ ) и электромагнитный момент на валу машины отрицателен. Изменению нагрузки на валу машины соответствует изменение угла θ. Образно это соответствует растяжению-сжатию пружины. Максимальный момент Ммакс будет иметь место при θ – π/2 . Если нагрузка на валу машины будет больше Ммахс, то синхронный режим нарушается и машина выпадает из синхронизма. Механическая характеристика синхронной машины представляют собой прямую, параллельную оси абсцисс и ограниченную значениями момента ± Ммакс (рис.3.25). Жесткость механической характеристики равна бесконечности. 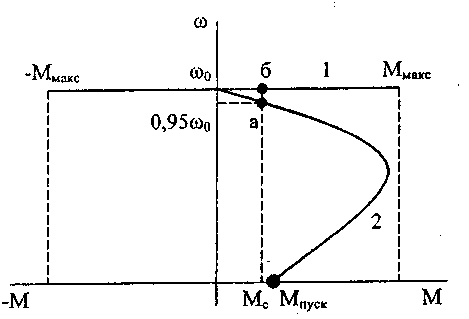 Рис.3.25. Механические характеристики синхронного двигателя 1 - характеристика синхронного режима 2 - пусковая характеристика (асинхронный режим) Поскольку ротор двигателя вращается с синхронной скоростью и скольжение отсутствует, то вся мощность электромагнитного поля статора Рэмпреобразуется в механическую мощность на валу синхронного двигателя. Если пренебречь потерями в статоре, то Рэм = 3U1I1 соsφ = Мω0, откуда Рассмотрим векторную диаграмму неявнополюсной синхронной машины (рис. 3.26). Двигатель с неявнополюсным ротором имеет симметричную в магнитном отношении конструкцию. Пренебрегая активным сопротивлением статора, получим Ů1 – Ė1 = jI1x1. Здесь Е, – э.д.с., наводимая в обмотках статора вращающимся вместе с ротором полем Ф0. 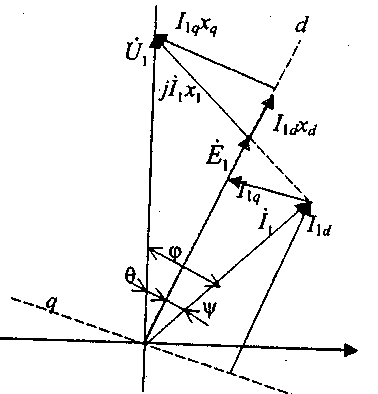 Рис.3.26. Векторная диаграмма синхронного двигателя Из векторной диаграммы следует: U1 sin θ = I1x1 cos (φ – θ) U1cos φ = E1 cos(φ – θ) Подставляя эти значения в (3.39), получим выражение для угловой характеристики неявнополюсной синхронной машины Из этого выражения и соответствующей ему угловой характеристики (рис.3.27) следует, что по мере нагружения синхронной машины угол нагрузки увеличивается и момент достигает максимума при θ = π/2. Для сохранения постоянной перегрузочной способности двигателя предусматривается автоматическое увеличение тока возбуждения при приложении ударной нагрузки или снижении величины питающего напряжения. 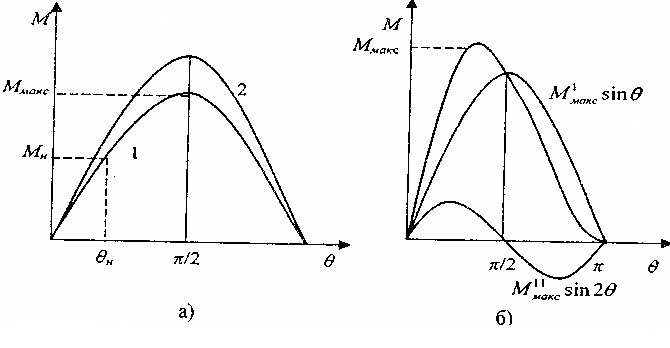 Рис.3.27. Угловая характеристика синхронного двигателя: а) неявнополюсной машины; б) явнополюсной машины 1 - при номинальном потоке возбуждения; 2 - при форсировке возбуждения Для синхронного двигателя явнополюсной конструкции, который имеет несимметричную магнитную цепь, кроме момента, вызванного полем ротора, возникает реактивный момент, определяемый стремлением ротора занять такое положение, при котором магнитная проницаемость для пути потока статора была бы максимальной. Угловая характеристика (см. рис.3.27,б) для такого двигателя описывается уравнением: где хd и хq – индуктивное сопротивление по продольной и поперечной осям. 5. 2. Режимы работы синхронного двигателя Поскольку синхронный двигатель имеет в синхронном режиме одну рабочую скорость, то пуск этих двигателей осуществляется в асинхронном режиме. Для этого в конструкции ротора предусмотрена короткозамкнутая обмотка, конструкция которой аналогична клетке ротора асинхронного короткозамкнутого двигателя. В синхронных двигателях со скоростью вращения 3000 об/мин ротор имеет массивную конструкцию, и роль пусковой клетки играет само тело ротора. При разгоне до подсинхронной скорости двигатель работает как асинхронный короткозамкнутый с механической характеристикой 2 (см. рис.3.25). По достижении подсинхронной скорости (точка а), которая должна быть не менее чем 0,95 ω0, в обмотку возбуждения подается постоянный ток, и двигатель втягивается в синхронизм, переходя на работу в точке б, соответствующей синхронному режиму. При работе в установившемся режиме с синхронной скоростью ток в пусковой клетке не протекает. Пусковая клетка ротора рассчитывается на кратковременный режим работы, и длительная (свыше 20–З0с) работа в асинхронном режиме недопустима. Кроме обеспечения режима пуска, пусковая клетка играет роль демпферной обмотки, стабилизируя переходные процессы при работе двигателя в синхронном режиме. Синхронные двигатели промышленного назначения имеют электромагнитное возбуждение от независимого источника постоянного тока, в качестве которого используются: генераторы постоянного тока (возбудители), которые могут располагаться на одном валу с синхронным двигателем (рис.3.28,б) или приводиться во вращение отдельным двигателем (рис.3.28,а), тиристорные управляемые выпрямители, которые могут получать питание от промышленной сети (рис.3.28,в), либо от специального генератора переменного тока, располагаемого на одном валу с синхронным двигателем. В последнем случае (рис.3.28,г) полупроводниковые выпрямители располагаются на роторе синхронной машины (система с вращающимися выпрямителями), вследствие чего не требуются щетки и кольца для подвода тока к обмотке возбуждения, т.е. синхронная машина становится бесконтактной. Во время разгона, когда двигатель работает в асинхронном режиме, возбудитель может быть подключен к обмотке ротора при снятом напряжении возбудителя (схема с глухоподключенным возбудителем), а может быть отключен от обмотки возбуждения контактором КМ (см., например, схемы рис.3.23 и 3.28). В последнем случае обмотка возбуждения замыкается на сопротивление или замыкается накоротко. Оставлять концы обмотки возбуждения во время разгона разомкнутыми нельзя, т.к. в обмотке при больших скольжениях наводится значительная э.д.с. скольжения. При использовании в качестве возбудителя тиристорного преобразователя или вращающихся выпрямителей во время пуска обмотка возбуждения закорачивается через шунтирующие тиристоры. Рассмотрим схему рис.3.28,в. При пуске двигателя в асинхронном режиме напряжение тиристорного преобразователя UD равно нулю. В обмотке возбуждения индуктируется переменная э.д.с. скольжения, под действием которой через стабилитроны VS открываются вспомогательные тиристоры У8, и обмотка возбуждения закорачивается на разрядное сопротивление R. Когда двигатель достигает подсинхронной скорости, э.д.с. скольжения становится малой, стабилитроны запираются, и тиристоры VS отключают разрядное сопротивление, после чего в обмотку возбуждения подается постоянный ток от преобразователя UD. В последние годы получили распространение возбудители, встроенные в конструкцию синхронной машины (рис.3.28,г). Возбудитель состоит из синхронного генератора G, ротор которого расположен на валу синхронного двигателя М, неуправляемого выпрямителя, вспомогательных тиристоров VS и разрядных сопротивлений R2 и R3, также размещенных на валу синхронного двигателя. Регулирование тока возбуждения производится изменением тока возбуждения возбудителя G. По достижении подсинхронной скорости цепи, шунтирующие обмотку возбуждения, размыкаются и в обмотку подается постоянный ток, после чего двигатель втягивается в синхронизм, его скорость достигает синхронной, и в дальнейшем он работает в синхронном режиме. 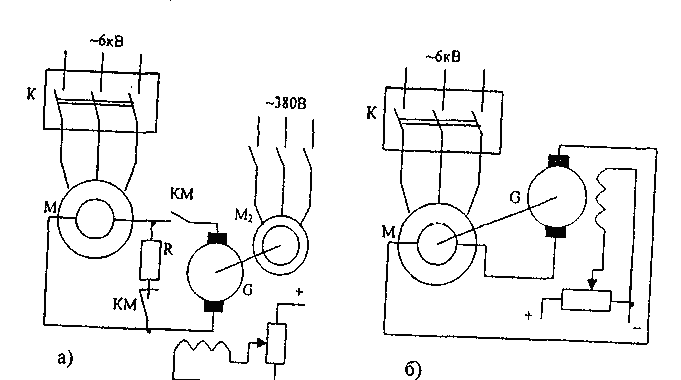 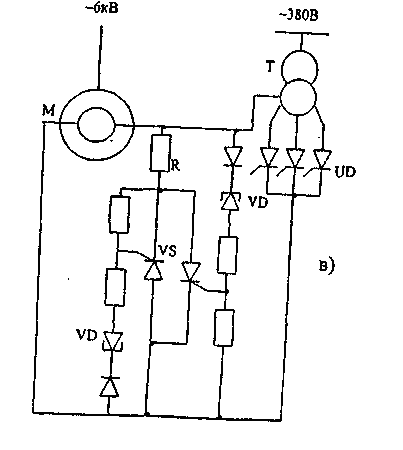 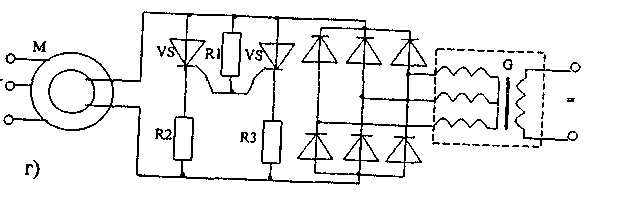 Рис.3.28. Схемы возбуждения синхронного двигателя 5.3. Регулирование тока возбуждения синхронного двигателя Регулирование тока возбуждения двигателя при работе в синхронном режиме осуществляется, как правило, САР возбуждения. САР возбуждения выполняет две основные функции. Первая - обеспечение устойчивой работы в синхронном режиме. При набросах нагрузки или при снижении величины питающего напряжения САР возбуждения форсирует (увеличивает) ток возбуждения, благодаря чему увеличивается максимальный момент двигателя в синхронном режиме (см. рис.3.27). Вторая - осуществление автоматического регулирования величины реактивной мощности, циркулирующей в статорной цепи двигателя. Важным достоинством синхронных двигателей является возможность регулирования величины реактивной мощности, циркулирующей в цепи статора, в том числе возможность, работая двигателем, т.е. потребляя активную мощность, одновременно генерировать реактивную мощность, т.е. работать компенсатором реактивной мощности, потребляемой другими параллельно работающими приемниками электрической энергии, прежде всего асинхронными двигателями. 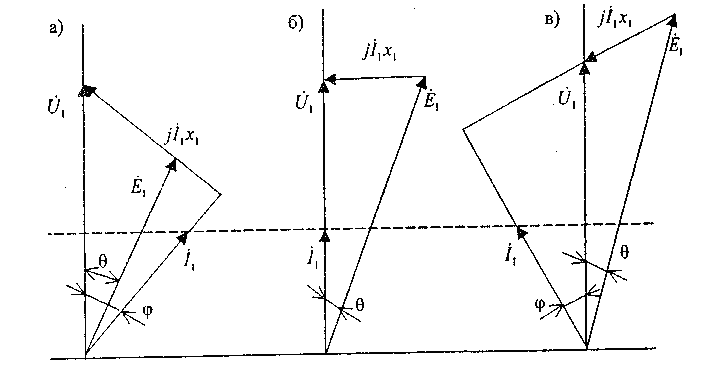 Рис.3.29. Векторные диаграммы синхронного двигателя при разных токах возбуждения и одинаковой нагрузке на валу Применение на предприятиях наряду с асинхронными синхронных двигателей позволяет уменьшить реактивную мощность, потребляемую предприятием в целом, и поддерживать нормативное значение cosφ в энергосистеме данного предприятия. Возможность регулирования реактивной мощности в цепи статора двигателя путем изменения тока его возбуждения иллюстрируется векторными диаграммами на рис.3.29. Векторная диаграмма (а) соответствует току возбуждения меньше номинального; при этом вектор тока статора İ1, отстает от вектора напряжения сети U1, на угол φ, т.е. двигатель работает с отстающими cosφ (реактивная мощность «потребляется»). При увеличении тока возбуждения э.д.с. Е1, наводимая в обмотках статора, увеличивается и может достигнуть такого значения, при котором ток статора İ1, будет совпадать по фазе с напряжением U1, т.е. cosφ = 1 (см. рис.3.29,б). Момент на валу двигателя при этом будет такой же, как и в предыдущем случае, но реактивная мощность будет равна нулю. Очевидно (это следует из формулы (3.39)) ток статора İ1 при данном моменте нагрузки будет минимальным. Этот режим является энергетически наиболее выгодным для синхронного двигателя, т.к. потери в статоре будут минимальным. 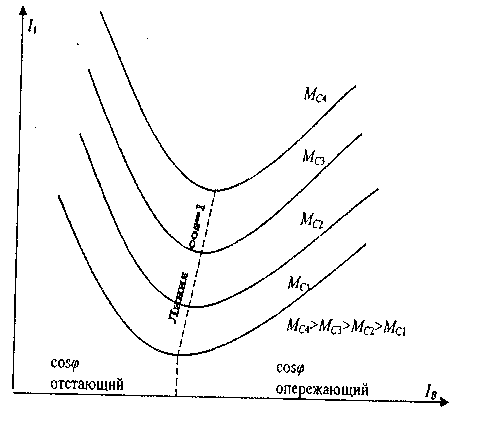 Рис.3.30.11-образные характеристики синхронного двигателя Если еще больше увеличить ток возбуждения, то ток статора будет опережать по фазе напряжение U1, cosφ станет опережающим, и синхронный двигатель будет генерировать реактивную мощность (см. рис. 3.29,в). Зависимость тока статора от тока возбуждения синхронного двигателя отражается U – образными характеристиками синхронного двигателя, представленными на рис.3.30. Лекция №6 РЕГУЛИРУЕМЫЕ ЭЛЕКТРОПРИВОДЫ С ДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА 6.1. Электромеханические характеристики двигателей постоянного тока независимого возбуждения Двигатели постоянного тока традиционно являлись основой регулируемого электропривода и широко применяются во всех областях техники. Только в последние годы началось интенсивное использование регулируемых электроприводов на базе двигателей переменного тока. Двигатели постоянного тока могут иметь независимое, последовательное или смешанное возбуждение. В зависимости от схемы возбуждения существенно разнятся и электромеханические характеристики двигателей. Двигатели независимого возбуждения могут иметь электромагнитное возбуждение, (рис.5.1,а) и возбуждение от постоянных магнитов (рис.5.1,6). Последнее применяется для высокодинамичных двигателей мощностью до 20 кВт. 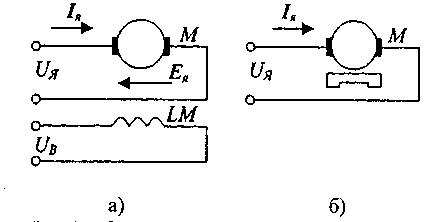 Рис.5.1. Схема включения двигателей постоянного тока независимого возбуждения а) с электромагнитным возбуждением; б) с возбуждением от постоянных магнитов Реверсирование (изменение направления вращения) двигателей независимого возбуждения производится изменением полярности напряжения, подводимого к якорю двигателя или к обмотке его возбуждения. Напряжение, подводимое к якорной цепи двигателя, в установившемся режиме уравновешивается падением напряжения на сопротивлениях цепи якоря и противоэ.д.с. якоря, которая наводится в обмотке якоря при его вращении в электромагнитном поле, создаваемом обмоткой возбуждения (см. рис.5.1,а) Uя = Ея + RяIя (5.1) Rя – сопротивление якорной цепи, складывающееся из сопротивления обмотки якоря Rоя, обмотки дополнительных полюсов Rдп, компенсационной обмотки Rко (если она имеется) и внутреннего сопротивления источника питания двигателя Rп (если оно учитывается) Rя = Rоя + Rдп + Rко + Rп Э.д.с. якоря Ея равна Ея = кФω (5.2) где Ф - поток возбуждения (Вб); к = рпN/2πа – конструктивная постоянная двигателя; где рп – число пар полюсов машины; N – число активных проводников обмотки якоря; а – число параллельных ветвей обмотки якоря. Момент, развиваемый двигателем, пропорционален току якоря и потоку возбуждения М = кФIя(5.3) Из уравнений (5.1), (5.2) и (5.3) легко получить зависимость скорости от тока якоря ω = f(Iя), которая называется электромеханической характеристикой двигателя, и зависимость скорости от момента двигателя ω = f(М) – механическую характеристику привода. Если двигатель во всех режимах работает с постоянным потоком возбуждения, то величину кФ считают постоянной кФ = С (5.6) Тогда приведенные выше уравнения будут иметь вид: М = СIя(5.7) Ея = Сω (5.8) Строго говоря, при изменении нагрузки на валу, когда изменяется ток якоря, поток двигателя вследствие размагничивающего влияния реакции якоря не остается постоянным. Для устранения влияния тока в цепи якоря на поток возбуждения на крупных машинах используют компенсационную обмотку, которая включается последовательно с обмоткой якоря и располагается на полюсах машины, усиливая поток возбуждения. Однако и для некомпенсированных машин в инженерных расчетах обычно пренебрегают размагничивающим действием реакции якоря, возлагая обеспечение линейности механической характеристики двигателя на замкнутые системы регулирования. В двигателях с возбуждением от постоянных магнитов реакция якоря практически не проявляется. Естественная механическая характеристика двигателя постоянного тока независимого возбуждения показана на рис.5.2. 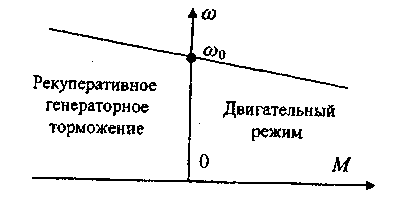 Рис.5.2. Естественная механическая характеристика двигателя постоянного тока независимого возбуждения Жесткость естественной механической характеристики β для рассматриваемых двигателей обычно высока и равна Механические характеристики двигателя постоянного тока независимого возбуждения представляют собой прямые, пересекающие ось ординат в точке идеального холостого хода ω0, величина которой равна С учетом (5.11) получим удобное выражение для механической характеристики при постоянном потоке возбуждения |