Лекции Электропривод ГМиММ. 1. Роль электропривода в современных машинных технологиях
 Скачать 3.83 Mb. Скачать 3.83 Mb.
|

|
7.4. Потери энергии в переходных режимах Потери энергии в переходных режимах, как правило, возрастают, поскольку эти процессы сопровождаются большими бросками тока. Так, при пуске асинхронного короткозамкнутого двигателя пусковые токи составляют 5-6 номинального. В процессе разгона двигатель должен не только преодолевать момент сопротивления, но и создавать динамический момент, идущий на увеличение кинетической энергии движущихся масс. Рассмотрим потери энергии в короткозамкнутом асинхронном двигателе за время пуска вхолостую (М^О). В процессе пуска двигатель, разгоняясь, проходит скольжения от 1 до 0. В этот период в роторе выделяются значительные потери энергии, что особенно неблагоприятно для короткозамкнутых двигателей, где эти потери не могут быть вынесены из машины в пусковые сопротивления. Так как потери в роторе пропорциональны моменту и скольжению ΔP = M · ω0s то потери энергии за один пуск будут:  (11.7) (11.7)При пуске вхолостую М = J∑(dω/dt) подставляя это значение момента в (11.7) и соответственно заменяя пределы интегрирования, получим:  Отсюда вытекает правило, что при пуске асинхронного двигателя вхолостую потери в цепи его ротора равны запасу кинетической энергии, который получают приходящие в движение маховые массы ротора двигателя и рабочего механизма при их разгоне до установившейся скорости. Заметим, что потери в роторе не зависят от времени пуска, пусковых токов и других параметров. Потери в статоре, напротив, зависят от параметров пуска. Во избежание перегрева для каждого короткозамкнутого двигателя существует предельное значение суммарного момента инерции, который может преодолеть данный двигатель. При пуске значение J∑пред указывается в каталогах. При отсутствии этих данных величина J∑пред может быть определена из следующих соображений. Допустимая величина энергии, выделяющейся в клетке ротора массой ткл„ не должна приводить к перегреву более чем на Тпер = 3000С. Отсюда ΔАдоп = тклСклТпер где Скл – Дж/кг.гр – теплоемкость материала клетки ротора. Расчет проводится исходя из необходимости обеспечения двух пусков подряд. Поэтому 2ΔА < тклСклТпер300. Из этих условий получим: Потери энергии в роторной цепи двигателя при динамическом торможении от скорости ω до минимальной скорости (затормозить двигатель до нулевой скорости при динамическом торможении нельзя) также равны запасу кинетической энергии, которой обладали движущиеся массы ротора и рабочей машины. При торможении противовключением двигатель работает при еще больших скольжениях - от sнач=2 до s=1. Подставляя эти значения в (11.7), получим, что Для асинхронного двигателя важно определить потери при пуске и торможении не только в роторной, но и в статорной цепи. Ориентировочно эти потери можно найти, зная потери в роторе и пользуясь соотношением Потери в статоре могут быть сокращены, используя, например, снижение напряжения на статоре при пуске (если это возможно). При плавном изменении ω0 в соответствии с заданным темпом разгона (при частотном управлении асинхронным двигателем или плавном повышением напряжения в приводах постоянного тока) двигатель работает с малыми скольжениями и потери в двигателе, как и в установившемся режиме, определяются величиной развиваемого момента. 8. Схемы управления электроприводами
Для управления электроприводами используется разнообразная аппаратура, посредством которой реализуется информационный канал электропривода, предназначенный для управления параметрами движения рабочего органа машины в соответствии с требованиями технологического процесса (см. раздел 1.3). Совокупность аппаратов управления и датчиков электрических, механических и технологических параметров образует информационно-управляющее устройство электропривода. Для коммутации силовых электрических цепей, устройств защиты и блокировок применяются, как правило, контактные электрические аппараты. Для выполнения логических функций управления, оптимизации параметров движения электропривода все в большей степени используются устройства и системы управляющей вычислительной техники: микропроцессорные средства и системы, программируемые контроллеры и промышленные компьютеры. Электромеханические аппараты управления электроприводами различаются по их функциям, величине коммутируемого тока и напряжения. По выполняемым функциям:
Автоматические выключатели (автоматы). Предназначены для защиты электрических линий и приемников электроэнергии от токов короткого замыкания и токов перегрузки. Отключение автоматов происходит под действием расцепителей: максимальных, тепловых и независимых. Защита от токов короткого замыкания осуществляется максимальными расцепителями электромагнитного типа. Тепловые расцепители служат для защиты от токов перегрузки. В настоящее время используются отечественные автоматические выключатели серий АК-63, АЕ-1000, АЕ-2000, АЗ 100, АЗ700, ВА, Электрон. Автоматические выключатели выбираются по номинальному току, составу расцепителей и номинальному току расцепителей. Для силовых электрических аппаратов принят ряд номинальных значений токов: 10, 16, 25, 40, 63, 100, 160, 250, 400, 630, 1000А и более. Электромагнитные контакторы. Служат для оперативного дистанционного включения и отключения силовых электрических цепей. Контакторы различаются по роду тока (постоянного и переменного); по числу главных контактов (одно и двухполюсные постоянного тока, трехполюсные переменного тока); по напряжению питания катушки управления; числу блок-контактов и другим параметрам. Так как контакторы коммутируют значительный по величине ток в цепях, содержащих индуктивности, они снабжаются устройствами гашения дуги на главных контактах. Промышленностью выпускаются контакторы постоянного тока одно и двухполюсные серий КП и КПД на токи от 25 до 250А и контакторы постоянного тока однополюсные для частых включений серий КПВ600, КПВ620 на токи от 100 до 630 А. Контакторы переменного тока серий КТ6000, КТ7000, КТП600 выпускаются на токи от 63 до 1000А и имеют от двух до 5 (чаще всего 3) главных контактов. Контакторы серии МК на токи до 160А используют в цепях постоянного и переменного тока с катушкой управления только на постоянном токе. Магнитные пускатели. Это специализированные контакторы, предназначенные для управления асинхронными короткозамкнутыми двигатели. В состав пускателя входят: коммутирующее устройство в виде контактора (может быть нереверсивным и реверсивным, т.е. содержать 2 контактора), тепловые реле защиты, иногда сигнальные лампы и кнопки управления). Выпускаемые магнитные пускатели различаются на нереверсивные и реверсивные, по величине номинального тока на 6 габаритов (10, 25, 40, 63, 100, 160А), наличию тепловых реле и других встраиваемых элементов. В настоящее время промышленностью выпускаются магнитные пускатели серий ПМЛ, ПАЕ, ПА, ПМЕ и другие. 8.2. Схема управления пуском асинхронного двигателя Схема управления асинхронным двигателем посредством магнитного пускателя нереверсивного (а) и реверсивного (б) показана на рис.9.1. 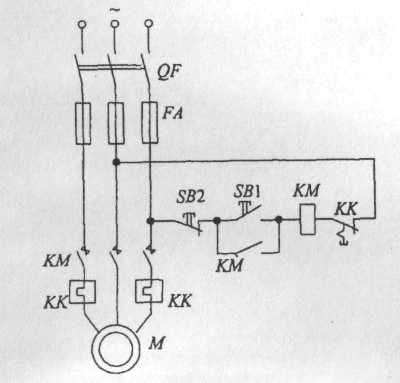 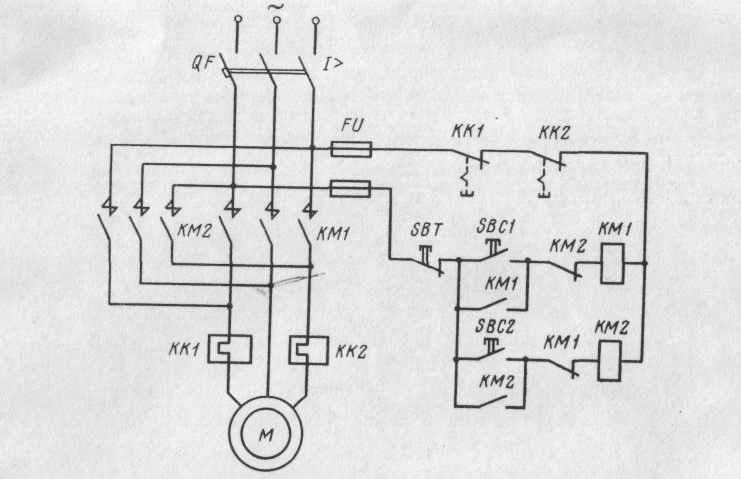 9.1. Схема управления асинхронными двигателями посредством магнитного пускателя а) нереверсированнго б) реверсированного Для пуска двигателя нужно включить выключатель QF и нажать кнопку пуска SВ1. Получает питание катушка контактора КМ, который своими главными контактами подключает обмотки статора двигателям к сети. Блок-контакт КМ шунтирует кнопку «пуск», так что после ее отпускания контактор КМ остается включенным. Для отключения двигателя нужно нажать кнопку «стоп» SВ2, после чего контактор КМ отключается. Защита от коротких замыканий в схеме рис.9.1,а осуществляется плавкими предохранителями FА, а в схеме рис.9.1,6 - автоматическим выключателем QF и предохранителями FА. Защита двигателя от токов перегрузки производится тепловым реле КК, разрывающим при срабатывании цепь катушки контактора. Возврат теплового реле после срабатывания осуществляется нажатием имеющейся на нем кнопки. Защита от самопроизвольного включения двигателя после исчезновения (снижения) напряжения питания реализуется блок-контактом КМ, шунтирующим кнопку SВ1. В реверсивном пускателе (рис.9.1,6) имеются два контактора КМ1 и КМ2, подключающих обмотки статора к сети с разным порядком чередования фаз. Для исключения одновременного включения двух контакторов, что приведет к короткому замыканию, предусмотрены механическая и электрическая блокировки (введением нормально закрытых (н.з.) блок-контактов контакторов в цепи катушки другого контактора). 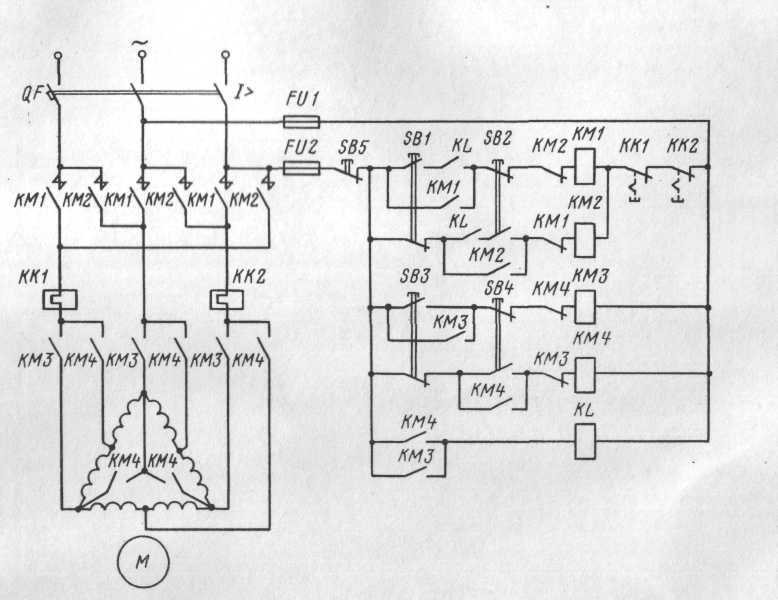 Рис 7.12. Схема управления реверсивным электроприводом с двухскоростным асинхронным короткозамкнутым двигателем Схема управления реверсивным электроприводом с двухскоростным асинхронным короткозамкнутым двигателем приведена на рис. 7,12. Такой привод обеспечивает две скорости: первая из них получается при соединении обмоток статора в «треугольник», что осуществляется нажатием на кнопку SВЗ и включением контактора КМЗ, вторая — при соединении обмоток статора в двойную «звезду», что выполняется нажатием на кнопку SВ4 и включением контактора КМ4. До включения контакторов КМЗ и КМ4 включают автоматический выключатель QF. После предварительного соединения обмоток статора производится пуск двигателя при помощи контакторов КМ1 или КМ2 в одном или другом направлении, цепи катушек которых подготавливаются к работе замыканием контактов промежуточного реле КL, которое включается замыкающим контактом контактора КМЗ или КМ4. Включение контактора КМ1 или КМ2 осуществляется соответственно нажатием на кнопку SВ1 или SВ2. Применение двухцепных кнопок SВ1—SВ4 позволяет осуществить дополнительную электрическую блокировку, исключающую одновременное включение контакторов КМ1 и КМ2, а также КМЗ и КМ4. В рассмотренной схеме управления предусмотрена возможность переключения с одной скорости на другую при вращении двигателя в одном или другом направлении, а также защита двигателя тепловыми реле КК1 и КК2 и защита цепи управления от коротких замыканий плавкими предохранителями FU1 и FU2. Реле управления и защиты. В системах управления и защиты широко используются электромагнитные реле, служащие для коммутации цепей управления. Коммутационная способность контактов реле не превышает, как правило, 6А. Промежуточные реле предназначены для передачи команд из одной цепи в другую и для увеличения числа одновременно срабатывающих контактов, а также для увеличения мощности передаваемого дискретного сигнала. Реле напряжения используются в цепях защиты от исчезновения или недопустимого снижения напряжения. Катушки реле напряжения и промежуточных рассчитаны на напряжение постоянного тока 12, 24, 48, 110 и 220В. Промежуточные реле могут иметь до 8 нормально открытых (н.о.) и нормально закрытых (н.з.) контактов. Реле времени предназначены для осуществления задержки по времени при передаче управляющего сигнала (команды). Наиболее распространены электромагнитные реле времени постоянного тока серии РЭВ800. Выдержка времени у этих реле создается при отключении их катушки; контакты реле при этом удерживаются определенное время (от 1 до 15 сек) за счет магнитного потока, создаваемого вихревыми токами в гильзе, надетой на магнитопровод реле. Кроме электромагнитных используют пневматические, механические и электронные реле времени. Пневматическое реле представляет собой электромагнитное реле с пневматическим демпфером, замедляющим движение якоря реле при включении. Пневматические реле дают выдержку при включении от 0,5 до 180 сек. Электромагнитные реле тока и напряжения являются измерительными реле, которые срабатывают (включаются или отключаются) при достижении контролируемой величиной заданного значения. Ток (напряжение) срабатывания регулируется изменением силы натяжения возвратной пружины. Тепловые реле служат для защиты электродвигателей от перегрузки. Чувствительным элементом этих реле является биметаллическая пластина, которая при нагреве прогибается, вызывая размыкание контакта реле. Промышленностью выпускается большое число типов реле различного назначения. Наиболее распространены промежуточные реле РПУО, РГТУ1, 2, 3, 4, электромагнитные реле тока, напряжения и времени РЭВ800, пневматические реле РВП-72 тепловые реле ТРН и ТРТП и многие другие. В системах управления электроприводами, кроме указанных используются и другие контактные электрические аппараты. Сведения о них можно найти в специальной литературе [18] и справочниках. Содержание: 1. Роль электропривода в современных машинных технологиях 1.2. Структура электропривода 1.3. Классификация электроприводов 2.1. Механические характеристики двигателя и рабочего механизма 2.2. Уравнение движения электропривода 2.3. Приведенное механическое звено 3. Электромеханические свойства асинхронных двигателей 3. 1. Принцип работы асинхронного двигателя 3.2. Механическая характеристика асинхронного двигателя 3.3. Способы пуска АД
4.Электромеханические характеристики синхронных электродвигателей 4.1. Принцип работы синхронного двигателя 4. 2. Режимы работы синхронного двигателя 4.3. Регулирование тока возбуждения синхронного двигателя 5. РЕГУЛИРУЕМЫЕ ЭЛЕКТРОПРИВОДЫ С ДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА 5.1. Электромеханические характеристики двигателей постоянного тока независимого возбуждения 5.2 Электропривод с двигателями постоянного тока с последовательным возбуждением 6. Переходные процессы в электроприводе 6.1. Общие сведения 6.2 Переходные процессы, определяемые механической инерционностью электропривода 7. Энергетика ЭП 7.1. Расчет мощности и выбор типа электродвигателя для разных режимов работы
7.3 Энергетические показатели электропривода 7.4. Потери энергии в переходных режимах 8. Схемы управления электроприводами
8.2. Схема управления пуском асинхронного двигателя |