Лекции Электропривод ГМиММ. 1. Роль электропривода в современных машинных технологиях
 Скачать 3.83 Mb. Скачать 3.83 Mb.
|

|
Переходная характеристика i = f(t) носит экспоненциальный характер (рис.8.2,б). За время, равное Тэ, ток в обмотке возбуждения возрастает до значения 0,63Iуст; за время 5Тэ – до значения 0,95Iуст; за время 5Тэ – до значения 0,996Iуст. Практически можно считать, что время переходного процесса при экспоненциальном характере составляет 3-5 постоянных времени. Если нужно ускорить нарастание тока в обмотке возбуждения, то это можно сделать единственным способом - увеличить напряжение, подводимое к индуктивности (обмотке возбуждения) на время протекания переходного процесса. Если, например, мы увеличим напряжение в а раз до значения Uф = aIустR, то ток в обмотке возбуждения будет нарастать быстрее, как это следует из характеристики 2 на рис.8.2,6. По достижении током значения Iуст напряжение на обмотке возбуждения следует уменьшить до значения U = IустR. Таким образом, для уменьшения времени переходного процесса нужно применить форсировку напряжения, которая затем снимается. Отношение a= Uф/ U называется коэффициентом форсировки. 6.2 Переходные процессы, определяемые механической инерционностью электропривода Переходные процессы в электроприводе, когда изменяются ток, момент и скорость двигателя, представляют собой сложное явление - одновременное протекание электромагнитных и механических переходных процессов. Характер переходного процесса зависит от числа инерционностей, участвующих в данном процессе, и соотношения между характеризующими их постоянными времени. Переходные процессы в зависимости от характера объекта могут описываться линейными или нелинейными дифференциальными уравнениями. Если нелинейности несущественны, можно прибегнуть к линеаризации уравнений. В случае линейных систем анализ переходных процессов (расчет переходных характеристик) может производиться аналитическими методами. В случае нелинейных систем целесообразно пользоваться численными методами решения уравнений на ЭВМ или методами компьютерного моделирования. Если постоянные времени по величине отличаются на два и более порядка, то можно малыми постоянными времени пренебрегать. Проведем анализ электромеханической системы, состоящей из двигателя с линейной механической характеристикой, и жесткого механического звена. Движение такой электромеханической системы определяется уравнением движения электропривода (см. раздел 2.3) где J∑ и Мс — суммарный момент инерции и момент сопротивления движению, приведенные к валу двигателя. Линейная механическая характеристика описывается уравнением М = β(ω0 – ω) (8.9) здесь ω0 – скорость идеального холостого хода. Совместное решение (8.8) и (8.9) позволяет получить уравнение, описывающее переходные процессы двигателя, определяемые механической инерционностью электропривода Mc/β=Δ ωc Величина Мс/β представляет собой падение скорости от нагрузки – статическую ошибку Δωс (см. раздел 4.2), а величина (ω0 – Мс/β) –установившееся значение скорости ωуст после окончания переходного процесса, когда М станет равным Мс (см. рис.8.3,а). 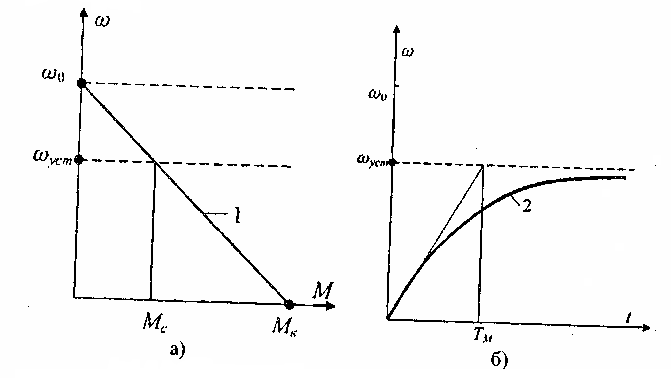 Рис.8.3. Переходный процесс пуска электропривода 1 - механическая характеристика 2 - переходная характеристика Тогда, обозначив получим выражение для переходной характеристики электропривода. Переходные процессы, определяемые одной механической инерционностью, суммарным приведенным к валу двигателя моментом инерции J∑, описываются дифференциальным уравнением первого порядка. Решением этого уравнения является переходная характеристика, имеющая вид экспоненты с постоянной времени Тм (см. рис.8.3,6). при ωнач = 0 7 Энергетика ЭП 7.1. Расчет мощности и выбор типа электродвигателя для разных режимов работы При выборе приводного электродвигателя решается комплекс вопросов:
По условиям окружающей среды двигатели изготавливают в следующих климатических исполнениях У, УХЛ, Т, М, ОМ (ГОСТ 15543-70) (для умеренного, умеренного и холодного, тропического и морского климата). По степени защиты персонала от соприкосновения с токоведущими и движущимися частями и попадания посторонних тел внутрь машины, а также степени защиты от проникновения воды внутрь машины, они выпускаются в следующих исполнениях: 1РОО - открытая электрическая машина, специальная защита отсутствует; 1Р10, 1Р20 - машина, защищенная от прикосновения и попадания посторонних предметов; 1Р11...1Р43 - машина, защищенная от капель воды, от прикосновения и попадания посторонних предметов; 1Р44-1Р54 - закрытая машина, защищенная от брызг, прикосновения и попадания посторонних предметов; 1Р55...1Р58 - закрытые машины, защищенные от водяных струй (1Р55) и от проникновения воды внутрь при неограниченно длительном погружении в воду (1Р58). Кроме того, выпускаются машины для работы во взрывоопасной среде и в особых условиях окружающей среды. По способу охлаждения двигатели подразделяют на машины с естественным охлаждением, с самовентиляцией, имеющие вентилятор на валу двигателя (защищенные или закрытые) и с независимой вентиляцией. Для электроприводов, предназначенных для работы в динамических режимах (механизмы циклического действия, следящие электроприводы и другие) стремятся выбирать двигатель с пониженным моментом инерции ротора (якоря). Для таких условий изготавливаются малоинерционные двигатели. Для машин с кри-вошипно-шатунной кинематикой применяют двигатели с повышенным моментом инерции. Для электроприводов, работающих в повторно-кратковременном режиме и в неблагоприятных условиях эксплуатации, связанных с механическими нагрузками, воздействием повышенной влажности, температуры и прочее, изготавливаются двигатели специального конструктивного исполнения - двигатели краново-металлургических серий. При выборе номинальных параметров электропривода возникает задача выбора величины передаточного коэффициента редуктора (или другой передачи), соединяющего вал электродвигателя с рабочим органом машины. Синхронные и асинхронные двигатели выпускаются с высокими скоростями вращения (синхронная скорость обычно 3000, 1500, 1000, 750, 600 об/мин), в то время как скорость рабочего органа, как правило, требуется значительно ниже. Для снижения скорости и соответствующего повышения момента на валу рабочего органа необходимо использование понижающей передачи (редуктора). Следует иметь в виду, что масса, габаритные размеры электродвигателя (а, следовательно, его стоимость) определяются не его номинальной мощностью, а номинальным моментом. где Рн – номинальная мощность двигателя, Вт; Мн – номинальный момент двигателя, Нм; ωн – номинальная угловая скорость двигателя, 1/с; пн – номинальная скорость вращении, об/мин. Номинальный момент двигателя пропорционален объему активных частей электрической машины и принятыми для этой машины величин электрических и электромагнитных нагрузок: допустимой плотности тока в обмотках А(А/мм2) и индукции в магнитопроводе В(Тл), т.е. Мн = кD2 L · A · B где D и L – диаметр и длина активной части ротора двигателя. Приближенно можно считать, что габариты и вес активных частей двигателя пропорциональны номинальному моменту. Например, двигатель с номинальной скоростью вращения (асинхронной) - 750 об/мин будет примерно в 4 раза больше (по активным частям) и дороже, чем двигатель той же мощности, но с номинальной (синхронной) скоростью 3000 об/мин. Исходя из этого, конструктору при выборе кинематической схемы привода следует выбирать, чему отдать предпочтение: электродвигателю меньшего веса и меньших габаритов, но с редуктором, имеющим большое передаточное отношение, или большему по габаритам и весу электродвигателю в сочетании с более простым редуктором с меньшим передаточным отношением или вообще обойтись без механической передачи. Выбор производится, исходя из технико-экономических соображений и удобства компановки конструкций рабочей машины в целом. Для электроприводов малой и средней мощности (до 200 кВт), как правило, применяются редукторные электроприводы. Современным конструкторским решением является использование моторредукторов, в которых электродвигатель и редуктор объединены в один конструктивный узел. Мощность приводного электродвигателя рассчитывается, исходя, главным образом, из трех условий:
Нагрев двигателя сверх допустимого значения приводит к ускорению старения изоляции и выходу двигателя из строя. Допустимый нагрев зависит от класса применяемой изоляции для обмоток двигателя. Таблица 12.1 Допустимые температура нагрева и превышение температуры электродвигателя для различных классов изоляции
Расчеты температуры перегрева двигателя в соответствии с известной нагрузочной диаграммой являются весьма трудоемкими. Наиболее точным методом является метод средних потерь энергии в двигателе ΔРср. Для каждой величины нагрузки определяют значение потерь в двигателе и далее находят среднее значение потерь за цикл работы. Такой метод редко применяется из-за сложности расчета потерь. Поэтому на практике пользуются косвенными методами оценки нагрева двигателя. Наиболее часто применяются методы эквивалентных величин: тока, момента или мощности.
Допустимые температура нагрева и превышение температуры электродвигателя для различных классов изоляции.
Выделение потерь ΔР в объеме двигателя вызывает его нагрев. Проведем упрощенный анализ процессов нагрева и охлаждения. Примем допущение, что двигатель в тепловом отношении представляет собой однородное твердое тело, характеризующееся:
Уравнение теплового баланса будет ΔP · dt = C · dτ + A · τ · dt (11.11) где τ – превышение температуры двигателя над температурой окружающей среды. Первый член уравнения (11.11) характеризует потери в двигателе, которые преобразуются в тепло, второй член - количество тепла, идущее на нагрев двигателя, третий - количество тепла, которое двигатель отдает окружающей среде. В первое время после включения двигателя, когда его температура еще мало отличается от температуры окружающей среды (τ = 0), отдача тепла в окружающую среду отсутствует и третий член уравнения (11.11) равен нулю. По мере нагрева двигателя все большая часть выделяемого в двигателе тепла передается в окружающую среду и, когда достигается равновесие между количеством выделяемого тепла и отдаваемого в окружающую среду, температура двигателя становится постоянной — установившейся. Преобразовав уравнения (11.11) к нормальному виду при условии ΔР = const, получим Решение этого уравнения будет Обычно принимают температуру окружающей среды, равной начальной температуре перегрева. Тогда τнач = 0 В полученных выражениях: τуст = ΔР/А – установившееся значение температуры, которое зависит от величины потерь в двигателе, т.е. от его нагрузки; Тн = С/А – постоянная времени нагрева двигателя. Переходная характеристика нагрева двигателя приведена на рис. 11.2. Она носит экспоненциальный характер. За время, равное Тн двигатель нагреется до температуры 0,63 τуст.  Рис. 11.2. Кривые нагрева (1) и охлаждения (2) двигателя Поскольку постоянные нагрева обоих двигателей равны, их температура достигнет своего установившегося значения за одно и то же время, примерно равное 1 часу (tн=3Тн). Величина установившейся температуры перегрева будет, конечно, разной. У более нагруженного двигателя эта температура будет примерно в 2 раза выше (рис.11.3). 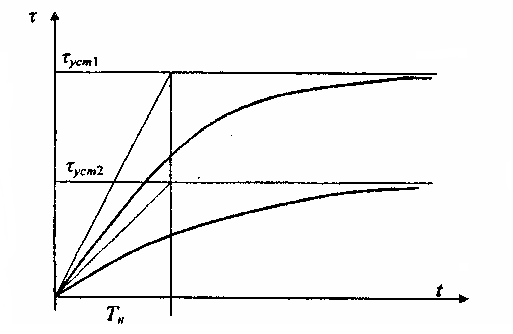 Рис. 11.3. Кривая нагрева двигателей (к задаче 10.2) При охлаждении характер изменения температуры во времени также описывается уравнением (11.12). Если двигатель отключается и будет остывать до температуры окружающей среды (как показано на рис. 11.2), то τуст = 0. Тогда τ = Следует иметь в виду, что для самовентилируемых двигателей коэффициент теплоотдачи А существенно зависит от скорости, поэтому охлаждаются такие двигатели намного медленнее, чем они нагреваются. Постоянная времени нагрева при охлаждении Тн больше, чем при нагревании Тн > Тн. | ||||||||||||||||||||||||||||||||||||||||||||||||