Системы ограничения. Текст монографии. Адаптивность к свойствам объекта, форме поверхности ограничения
 Скачать 4.57 Mb. Скачать 4.57 Mb.
|

1.2. Эксплуатационные и предельные режимы полетаЛетательные аппараты могут совершать полеты лишь в определенном диапазоне кинематических параметров (скорости, высоты, углы положения ЛА, скорости их изменения и т.д.) и параметров, определяющих работу функциональных систем ЛА. Выход из этого диапазона приводит к возникновению аварийной (или катастрофической) ситуации и к угрозе появления такого неблагоприятного события, как авиационное происшествие. Формально можно считать, что в фазовом пространстве упомянутых параметров существует поверхность, разделяющая это пространство на две области: эксплуатационных и критических режимов. Эта поверхность, как известно, имеет название критической. Однако фактически, с учетом существующей неопределенности в описании атмосферы (турбулентность, осадки и т.д.), незначительных различий в характеристиках летательных аппаратов, особенностей пилотирования летчиками, данная поверхность превращается в слой определенной толщины. По соображениям безопасности полетов в этом случае за критическую поверхность приходится принимать ту сторону слоя, которая расположена со стороны эксплуатационной области. Тем не менее, пилот не в состояние точно удерживать траекторию движения в рассматриваемом фазовом пространстве. Чтобы не допустить выхода летательного аппарата за критическую поверхность вводят новую поверхность, еще более сужающую эксплуатационную область. Полученная область носит название области допустимых режимов полета. Аппроксимируя критическую поверхность гиперплоскостью, представляется возможным в качестве границы области допустимых режимов задавать ограничения на изолированные параметры, а не на их функции. Это совершенно необходимо, если контроль за выдерживанием ограничений осуществляет летчик, который должен помнить все заданные в Руководстве летной эксплуатации (РЛЭ) типа летательного аппарата величины параметров ограничения. Отметим, что создание и использование автоматических устройств, предотвращающих превышение заданных таким образом ограничений, помимо обеспечения безопасности полетов способно повысить и боевую эффективность. Для достижения этой вполне реальной задачи допустимые значения контролируемых параметров должны быть приближены к их критическим значениям. Задачей данной работы является автоматизация предотвращения выхода параметров за назначенные ограничения. В качестве ограничений приняты их значения, заданные в РЛЭ типа летательного аппарата. 1.3. Основные виды ограничений при пилотировании ЛАПричинами, вызывающими необходимость накладывать ограничения на параметры пилотирования ЛА (включая его траекторию в физическом пространстве) являются особенности аэродинамики; прочностные характеристики конструкции ЛА; недопустимость пересечения траектории ЛА с рельефом подстилающей поверхности; комбинации выше указанных причин. Особенности аэродинамики, в свою очередь, связаны с изменением характера обтекания ЛА на больших углах атаки и скольжения, предельных числах М полета, а также при переходе от дозвуковой скорости полета к сверхзвуковой и обратно. Для недопущения попадания в область неблагоприятного обтекания ограничивается максимальный угол атаки и числа М полета. На рис. 1.6 приведены диапазоны эксплуатационных, а также промежуточных неэксплуатационных (на рисунке заштрихованы) и закритических углов атаки. Кроме того, обозначены предельные 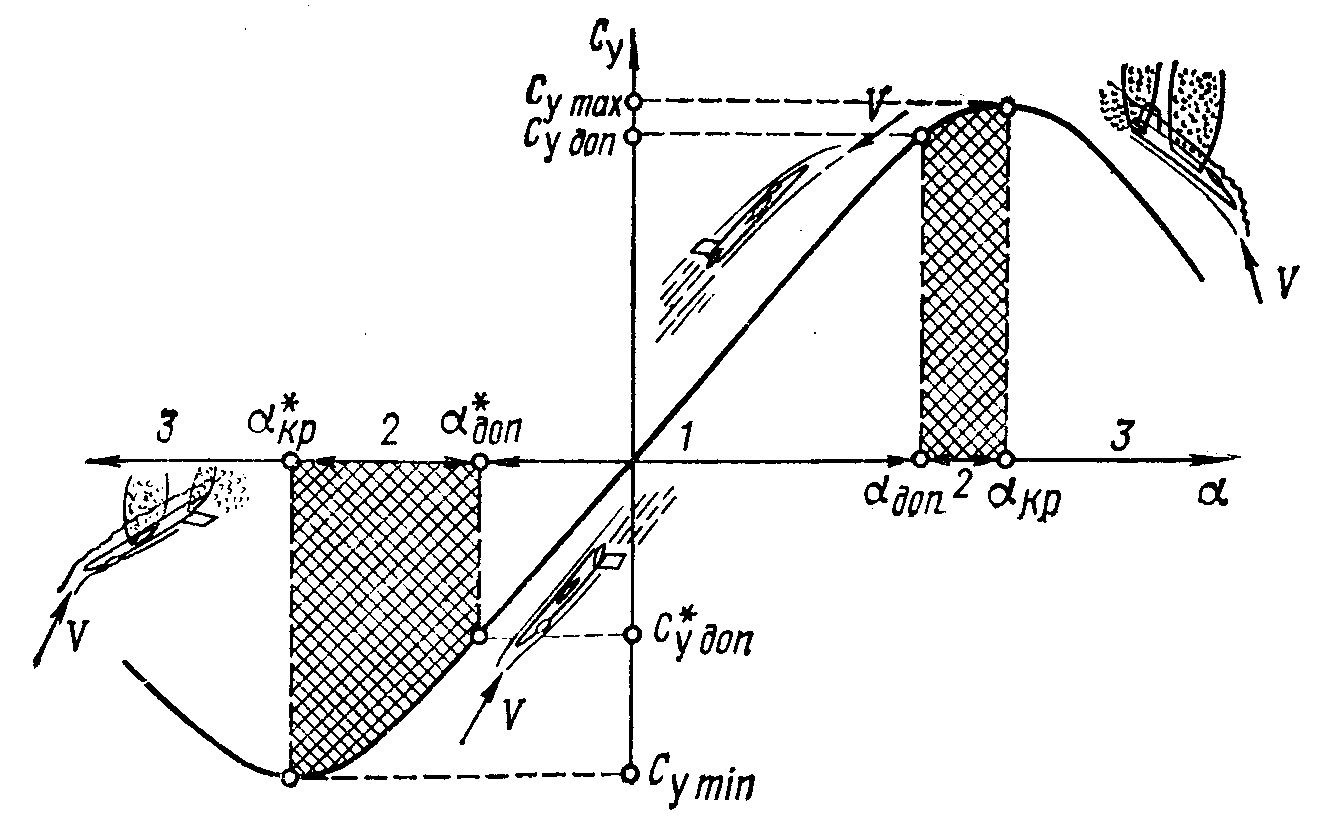 Рис.1.6 Необходимо отметить, что наличие скольжения уменьшает диапазон эксплуатационных углов атаки. Выход на большие углы атаки возможен не только на пилотаже, но и на малых скоростях полета, когда подъемная сила на докритических углах атаки оказывается недостаточной для уравновешивания веса самолета. Поэтому для установившегося прямолинейного горизонтального полета без крена и скольжения в качестве минимальной предельной скорости принимается минимально допустимая скорость полета ( Под максимальным предельным числом Мпред понимается наибольшее допустимое в нормальной летной эксплуатации самолета число М полета на данной высоте, при данных полетной конфигурации, режиме работы двигателей и полетном весе. Превышение в полете Мпред опасно, в первую очередь, появлением нежелательных особенностей в поведении и пилотировании самолета, например, потери путевой устойчивости. У тяжелых и ограниченно маневренных самолетов величина Мпред может быть связана с возникновением волнового кризиса, появлением опасных особенностей в поведении и пилотировании на околозвуковых числах М полета, например, затягивания в пикирование. По этим причинам на некоторых типах самолетов запрещается выполнять нисходящие маневры с разгоном по скорости, например, такие, как переворот, полупереворот, крутое пикирование. Прочностные характеристики конструкции ЛА накладывают ограничения на величину максимальной подъемной силы (угроза поломки или деформации несущих поверхностей самолета) и на величину скоростного напора. Физически ограничению подлежат максимальная перегрузка ny и максимальная приборная скорость Vпред. Помимо ограничения положительных значений перегрузки в РЛЭ задаются и отрицательные. Однако в практике выход на них крайне редок. Помимо указанных ограничений могут встречаться и другие причины ограничения нормальной перегрузки. Положительная предельная перегрузка может зависеть, например, от того, выполняется ли полет в противоперегрузочном костюме или без него. Отрицательная нормальная перегрузка ограничивается физиологическими возможностями экипажа, условиями работы топливной системы и тому подобное. Для тяжелых самолетов, как правило, устанавливается ограничение по предельному крену. Опасными последствиями превышения угла крена на малых высотах является потеря высоты при накренении самолета, а на больших высотах – затягивание его в крутую спираль. Причин, которые обусловливают возможность непроизвольного накренения самолета, довольно много,например, отказ двигателя, расположенного на одной из половин крыла, несимметричный пуск ракет или сброс бомб (подвесных топливных баков), нелокализованный отказ САУ по крену, реверс элеронов, попадание самолета в спутный след, обратная реакция по крену на управляющие действия летчика, и т.п. Однако очевидно, что для любого рассматриваемого летательного аппарата нельзя назвать одной граничной величины угла крена, превышение которой опасно. В зависимости от условий полета, в первую очередь от высоты полета и величины скорости, эта граница существенно меняется. Чем меньше высота полета в рассматриваемый момент времени и чем ближе скорость полета к минимально разрешенной скорости для данного самолета, тем меньшая величина угла крена может считаться допустимой. Более сложной задачей ограничения является задача предотвращения выхода вертолета на недопустимый угол крена. Это связано с тем, что, во-первых, разрешенный угол крена существенно зависит от высоты полета (обычно один градус крена на 1 метр высоты), и, во-вторых, для ликвидации крена на вертолете (в отличие от самолета) приходится использовать практически все органы управления. Весьма сложный вид ограничения приобретают при пилотировании на малых высотах, когда отдельные высоты подстилающего рельефа местности превышают (или близки по высоте) геометрическую высоту полета. Пилотирование в этих условиях должно гарантировать реализацию такой траектории полета, которая нигде не пересекается с рельефом местности. Из изложенного видно, что на параметры движения современного летательного аппарата наложены многочисленные ограничения, изменяющиеся в зависимости условий полета, положения ЛА в пространстве, его конфигурации и других факторов. Однако задача предотвращения выхода за установленные ограничения в настоящее время возложены в основном только на летчика. Хотя в помощь ему на борту летательного аппарата и существуют специальные технические устройства, либо имеются соответствующие режимы функционирования системы автоматического управления, но, судя по выше приведенной статистике, эффективность действий летчика и автоматических устройств невелика. Так, например, на современных самолетах величина автоматического ограничения Vпред и Мпред на самолетах не предусмотрено. Однако и авиационных происшествий за анализируемый период по причине выхода летательных аппаратов за указанные параметры не зарегистрировано. Поэтому проблема выхода за Vпред и Мпред не так остра, как выход на для предупреждения столкновения с рельефом местности на самолетах устанавливаются специальные системы или используются штатные режимы САУ. Однако они являются либо пассивными устройствами, обеспечивающими лишь информирование экипажа о недопустимом приближении к земле, либо включаются только при полете в автоматическом режиме; автоматизация ограничения угла крена осуществлена преимущественно на тяжелых самолетах и выполнена в виде пассивной сигнализации о предельном угле крена. Пропуск летчиком сигнала о достижении предельного угла крена с последующим развитием аварийной ситуации достаточно частое событие. |