Системы ограничения. Текст монографии. Адаптивность к свойствам объекта, форме поверхности ограничения
 Скачать 4.57 Mb. Скачать 4.57 Mb.
|

Глава 4. Алгоритмы адаптивного ограничения ТРАЕКТОРНЫХ параметров ДВИЖЕНИЯлетательных аппаратов4.1. Общий случай ограничения траектории движениялетательного аппарата в трехмерном пространстве состояний4.1.1. Содержательная постановка задачиПусть в нормальной системе координат точка 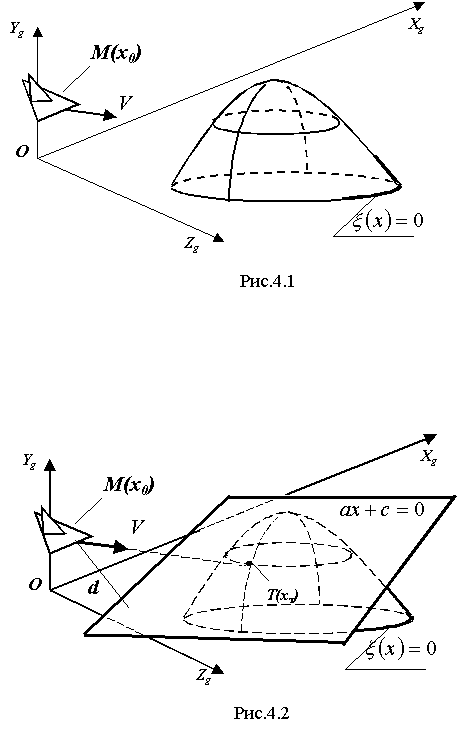 Рис.4.1 Требуется: при угрозе столкновения ЛА с поверхностью ограничения, аппроксимированной уравнением (4.1), обеспечить уклонение самолета от нее. Управление самолетом в процессе увода осуществляется в каналах тангажа, крена и курса. При этом предполагается, что команды управления вырабатываются системой ограничения в рамках доверенного ей управления. 4.1.2. Модель объекта и поверхности ограниченияЗададим модель пространственного движения летательного аппарата в виде  (4.2) (4.2)где Заметим, что в системе (4.2) управление u оказывает непосредственное влияние на вектор параметров w, а на вектор x – влияние опосредовано через вектор w, то есть вектор w является псевдоуправлением для вектора x, совокупность параметров которого подлежат ограничению. Доверим системе ограничения некоторым образом заданное управление и воспользуемся методикой синтеза ее алгоритмов, изложенной для детерминированной непрерывной управляемой многоуровневой динамической системы (см. главу 2). Для упрощения выкладок воспользуемся, изложенным подходом к описанию границы поверхности ограничения. А именно, в точке прогнозируемого столкновения самолета с поверхностью ограничения строится касательная плоскость, которая и принимается в качестве плоскости ограничения. Такой подход допустим вследствие цикличной работы алгоритма ограничения. Если ограничиться рассмотрением линейного прогноза траектории движения самолета, то координаты точки прогнозируемого столкновения Т (см. рис.4.2) определяются путем совместного решения уравнений поверхности ограничения (4.1) и линии, содержащей вектор скорости самолета. Рис.4.2 Каноническое представление последней имеет вид где Тогда, согласно [25], плоскость, касательная к поверхности ограничения в точке Т(хт), может быть представлена уравнением где При эволюциях летательного аппарата в пространстве, вследствие управляющих действий летчика, САУ или системы ограничения, изменяются координаты точки |