Системы ограничения. Текст монографии. Адаптивность к свойствам объекта, форме поверхности ограничения
 Скачать 4.57 Mb. Скачать 4.57 Mb.
|

4.2.2. Увод самолета в горизонтальной плоскостиПусть движение самолета в горизонтальной плоскости описывается системой уравнений  (4.29) (4.29)Ограничение в координатах OLZ представлено линией (см. рис.4.9) 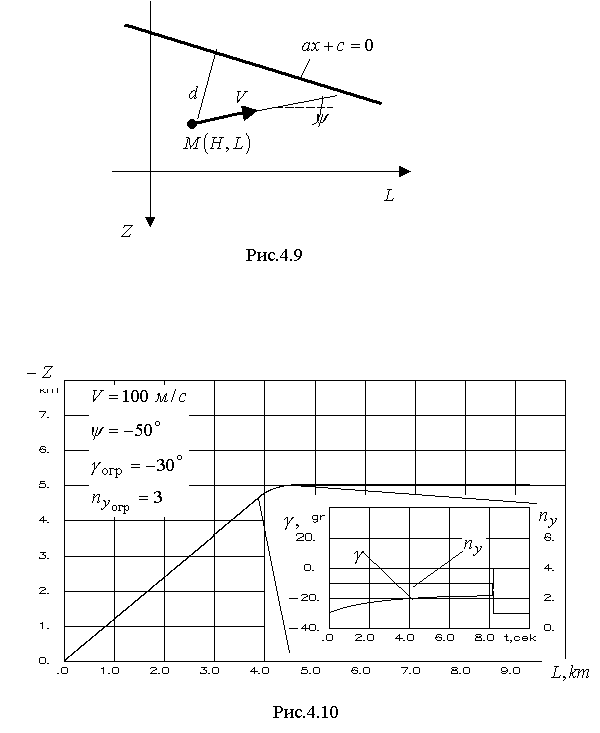 Рис.4.9 Нетрудно заметить, что выражение (4.30) является развернутым представлением уравнения (4.12) при условии, что Схема постановки данной задачи представлена на рис.4.9. Для синтеза алгоритмов ограничения воспользуемся подходом, изложенным в параграфе 4.1. В соответствии с ним, представим систему уравнений (4.29) в виде (4.2), обозначив вектор состояния кратчайшее расстояние от самолета до линии ограничения где скорость приближения самолета к ограничению располагаемое ускорение торможения самолета при условии срабатывания системы ограничения коррекция управления на этапе ограничения  . (4.34) . (4.34)В итоге можно записать выражение для дальности срабатывания системы ограничения в виде  . (4.35) . (4.35)Необходимо отметить следующий очевидный факт, касающийся задания управления ограничения. Для того, что бы самолет выполнял маневр увода строго в горизонтальной плоскости перегрузка увода и крен должны быть связаны зависимостью Если же на перемещение самолета в вертикальной плоскости при выполнении увода в "горизонте" специальных условий не накладывается, то Анализ (4.35) показывает, что дальность срабатывания растет с увеличением скорости полета и тем меньше, чем больше заданное управление ограничения. Результаты моделирования процесса увода в горизонтальной плоскости по приведенному алгоритму представлены на рис.4.10 – 4.12. Линия ограничения при моделировании задавалась следующими параметрами На рис.4.10 выносками показан переходный процесс изменения угла крена и нормальной перегрузки на участке увода. Из него видно, что в первоначальный момент времени алгоритм реализует заданное управление ограничения. Далее, для поддержания Рис.4.10 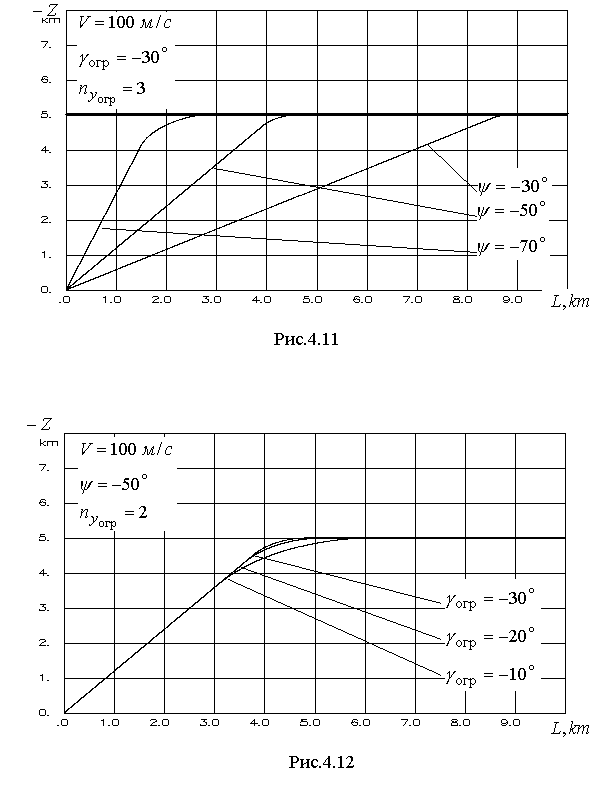 Рис.4.11 Рис.4.12 На рисунках 411 и 4.12 иллюстрируются свойства адаптивности алгоритма к изменению углов подхода самолета к линии ограничения, а также к настройкам управления ограничения |