Системы ограничения. Текст монографии. Адаптивность к свойствам объекта, форме поверхности ограничения
 Скачать 4.57 Mb. Скачать 4.57 Mb.
|

5.2. Алгоритмы расчета углов положения самолета в пространстве при уводе его от препятствияОчевидно, что угловое положение самолета в пространстве при уводе лежит в прямой зависимости от ориентации плоскостей U и K, определяемых, в частности, углами ζ и η (см. рис.5.2), которые в свою очередь зависят от вида поверхности ограничения и положения точки Т на ней. Координаты точки Т определяются путем совместного решения уравнений поверхности (5.1) и линии, содержащей вектор скорости самолета. Каноническое представление последней имеет вид Здесь Тогда плоскость, касательная к поверхности ограничения в точке Т, может быть представлена уравнением где В случае рассмотрения в качестве поверхности ограничения вогнутой поверхности (здесь под вогнутой поверхностью понимается поверхность, все точки которой относительно точки Т касательной поверхности в некоторой заданной окрестности находятся на меньшем расстоянии от ЛА, чем точка Т). Из физических соображений, плоскость К необходимо строить используя информацию о координатах трех близлежащих к ЛА точек на поверхности ограничения. Данные точки могут быть получены с помощью бортовых средств самолета. Тогда уравнение плоскости К будет иметь вид  (5.4) (5.4)Для удобства дальнейших преобразований запишем уравнения (5.3) и (5.4) в виде где для уравнения (5.3) а в случае использования уравнения (5.4)  и для обоих случаев При ориентации плоскости U в пространстве учитывается, что скорость увода самолета от препятствия должна иметь максимальное значение. Это может быть достигнуто в случае, когда плоскость U содержит нормаль описывающие положение плоскости U, рассчитываются по зависимостям  При этом угол ζ между плоскостью увода U и вертикальной плоскостью В (см. рис.5.2) равен  , (5.6) , (5.6)где Учитывая, что по определению  (5.7) (5.7)Для того чтобы самолет не входил в спираль и удерживался в плоскости U, силы, перпендикулярные к этой плоскости (см. рис.5.3), должны быть уравновешены. 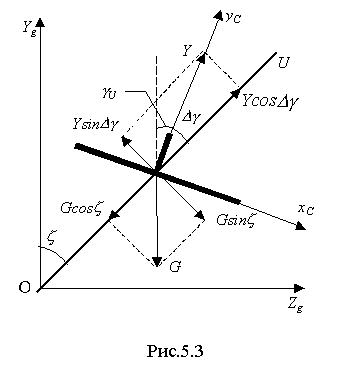 Рис.5.3 Это обеспечивается разворотом самолета на угол откренивания [40] В итоге, необходимый крен самолета будет равен Угол наклона траектории самолета при уводе представляет собой угол Так как прямая S образуется пересечением плоскостей U и К, и проходит через точку Т, то согласно [25] ее каноническое представление имеет вид где В результате, значение  . (5.11) . (5.11)В итоге получены выражения для определения и текущего перерасчета заданных углов положения самолета в пространстве в процессе выполнения маневра уклонения от поверхности ограничения. |