|
Системы ограничения. Текст монографии. Адаптивность к свойствам объекта, форме поверхности ограничения
5.3. Условия включения "увода"
Включение системы в работу осуществляется при соблюдении условия (см. рис.5.4)
 (5.12) (5.12)
где  – мгновенный радиус вращения центра масс самолета в плоскости маневра увода при условии его выполнения; – мгновенный радиус вращения центра масс самолета в плоскости маневра увода при условии его выполнения;  – текущая дальность от центра – текущая дальность от центра  кривизны траектории самолета, при его уводе с заданным управлением, до плоскости К (на рис.5.4 изображен след плоскости К, получаемый пересечением плоскости К и U – линия S). кривизны траектории самолета, при его уводе с заданным управлением, до плоскости К (на рис.5.4 изображен след плоскости К, получаемый пересечением плоскости К и U – линия S).

Рис.5.4
Мгновенный радиус вращения летательного аппарата в плоскости увода, согласно [40], определяется из выражения:
 , (5.13) , (5.13)
где . .
В силу того, что значение дальности, определяемое по (5.13), не учитывает время на создание перегрузки увода  и крена и крена  , дальность срабатывания корректируется следующим образом: , дальность срабатывания корректируется следующим образом:
 , (5.14) , (5.14)
где  – расстояние, проходимое центром вращения C (см. рис.5.5) в процессе достижении самолетом необходимой перегрузки увода – расстояние, проходимое центром вращения C (см. рис.5.5) в процессе достижении самолетом необходимой перегрузки увода  и заданного крена и заданного крена  , ,  - суммарное время их создания. - суммарное время их создания.
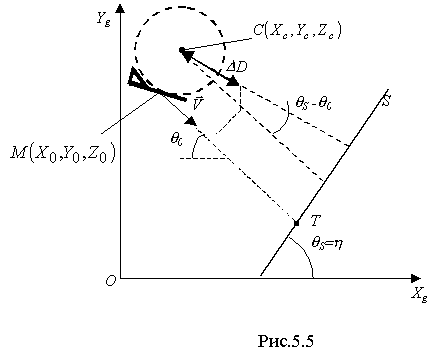
Рис.5.5
Располагаемые для текущего режима полета величины  , ,  и могут быть получены с помощью прогнозирующих моделей короткопериодического движения самолета [16], подавая на их вход доверенные системе скорость и величину отклонения рулевых поверхностей. и могут быть получены с помощью прогнозирующих моделей короткопериодического движения самолета [16], подавая на их вход доверенные системе скорость и величину отклонения рулевых поверхностей.
Значение текущей дальности находится с использованием соотношения
 , (5.15) , (5.15)
где координаты XC, YC, ZC определяются центром кривизны пространственной линии [25] и имеют следующие выражения:
 ; ;
 ; ;
 . .
Здесь  , ,  , ,  ; ;  – проекции вектора ускорения самолета на оси нормальной системы координат (расчетные значения при условии наличия сигнала управления от системы "увод"). – проекции вектора ускорения самолета на оси нормальной системы координат (расчетные значения при условии наличия сигнала управления от системы "увод").
Для реализации траектории увода в работе используются основные положения и алгоритмы метода прямой оптимизации, изложенные в [2].
|
|
|
 Скачать 4.57 Mb.
Скачать 4.57 Mb.