Системы ограничения. Текст монографии. Адаптивность к свойствам объекта, форме поверхности ограничения
 Скачать 4.57 Mb. Скачать 4.57 Mb.
|

4.4. Особенности выдерживания нестационарныхограниченийПри исследовании траекторных задач и в реальной практике нередки случаи необходимости ограничения параметров полета в зависимости от наличия движущихся объектов различной природы. Это, например, летящий на пересекающихся курсах самолет, зона осколков от применяемых средств поражения, зоны грозовой деятельности и тому подобное. Решению этой проблемы были посвящены ряд работ [2,5,7,8,9,23]. Однако в полном объеме задача не решена. В данном параграфе на достаточно простом, но не тривиальном примере показана применимость изложенного метода к решению проблемы ограничения нестационарной границы. Пусть две материальные точки, причем одна из них управляемая, двигаются навстречу друг другу. Уравнения, описывающие их движение, представлены в следующем виде  (4.45) (4.45)уравнения движения границы  (4.46) (4.46)Требуется определить расстояние между объектом и движущейся границей, при достижении которого необходимо включить заданное управление ограничения для объекта (4.45). Все параметры движения нестационарной границы считаются известными. Согласно методу ограничения дальность до границы определиться как первая производная от дальности: ускорение торможения, при условии включения управления ограничения компенсационное управление на этапе ограничения: где В итоге искомое расстояние включения алгоритма ограничения находится в соответствии с выражением Моделирование процесса ограничения по приведенным алгоритмам иллюстрируется рис.4.15. 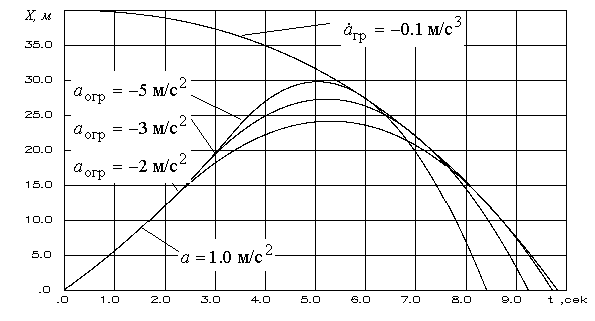 Рис.4.15 Из приведенных результатов видно, что алгоритм ограничения работоспособен и при рассмотрении нестационарной границы. Чем больше управление ограничения, тем быстрее объект может подойти к ней. Однако для обеспечения процесса ограничения необходимо знать параметры движения самой границы. Данный подход может быть применим и для более сложных случаев описания, как границы ограничения, так и объекта управления. Глава5. увод самолета от поверхностей ограничения по програмМируемым траекториям5.1. Содержательная постановка задачиВ данном разделе представлен подход к построению алгоритмов систем выдерживания ограничений в траекторном контуре управления летательным аппаратом, основанный на предварительном задании траектории движения ЛА. Использование такого подхода явилось следствием специфических действий человека как оператора в стрессовых ситуациях, причем известно, что деятельность экипажа в полете на малой высоте относится к первому типу экстремальных ситуаций. С учетом психологии летчика очевидно, что автоматический увод самолета от земной поверхности должен производится с помощью выполнения только восходящих маневров (возможны и маневры увода строго в горизонтальной плоскости, но только не нисходящие). На рис.5.1 схематично показан пример задачи ограничения, где рассмотренные выше алгоритмы будут стремиться произвести увод от границы нисходящим маневром – линия 1 на рисунке, в отличие от желаемого – линия 2. 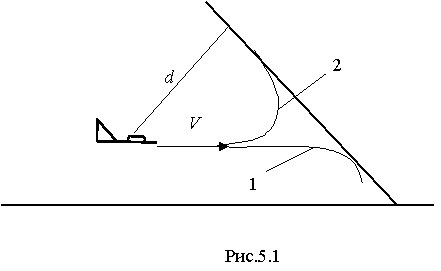 Рис.5.1 Для решения указанной проблемы рассмотрим схему увода самолета в нормальной системе координат и введем следующие обозначения (см. рис. 5.2): 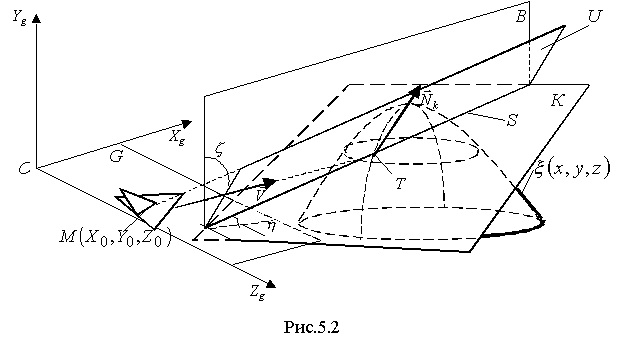 Рис.5.2 Управление самолетом в процессе увода осуществляется в каналах крена и тангажа с целью вывода объекта в плоскость увода U и его разворота в ней с максимально располагаемыми возможностями до совмещения траектории полета самолета с линией S. При этом предполагается, что командные сигналы управления вырабатывает система предупреждения столкновения самолета с земной поверхностью. |