Системы ограничения. Текст монографии. Адаптивность к свойствам объекта, форме поверхности ограничения
 Скачать 4.57 Mb. Скачать 4.57 Mb.
|

5.5.2. Наклонная плоскостьПостроение маневра увода летательного аппарата от наклонной плоскости К находится в сильной зависимости от курсового угла подхода к препятствию φ. Так, при 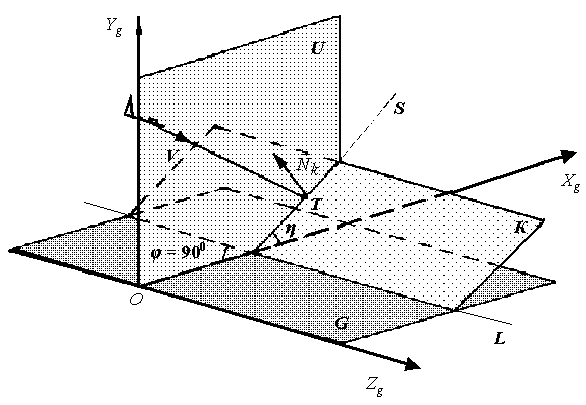 Рис.5.11 Когда же объект осуществляет полет вдоль прямой 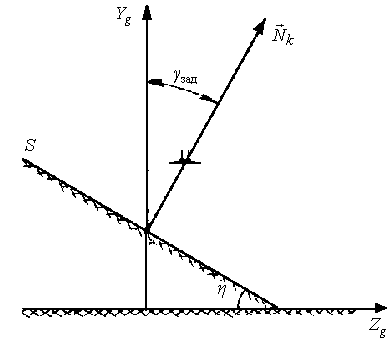 Рис.5.12 Общий случай построения заданных углов для маневра увода представлен на рис.5.13. 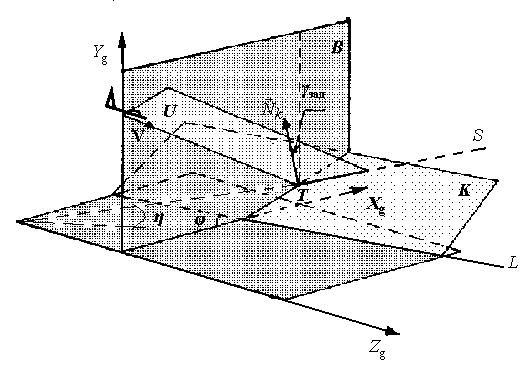 Рис.5.13 Результаты исследований по уводу ЛА от наклонной плоскости с различными начальными значениями угла пикирования  Рис.5.14  Рис.5.15 Видно, что изменение условий полета и параметров ориентации плоскости ограничения в пространстве не приводит к нарушению работоспособности разработанного алгоритма. 5.5.3. Сравнительный анализ алгоритмов "Увод"Сравнительный анализ предлагаемого алгоритма с алгоритмами, применяемыми в настоящее время в качестве традиционных режимов "Увод" САУ самолетов 4-го поколения, проводилась без учета ошибок моделирования, турбулентности атмосферы и погрешностей бортовой измерительной аппаратуры. Ставилась задача предотвращения столкновения объекта с наклонной плоскостью ограничения, "расположенной" на дальности 1500 м от начала земной системы координат, путем его увода в вертикальной плоскости. На рис.5.16 – 5.19 представлены траектории движения объекта при выполнении маневра увода от наклонных плоскостей ограничения с различными углами наклона к горизонту 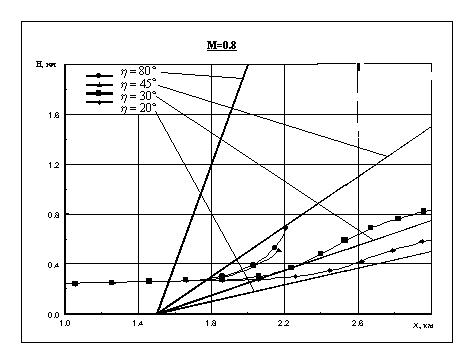 Рис.5.16 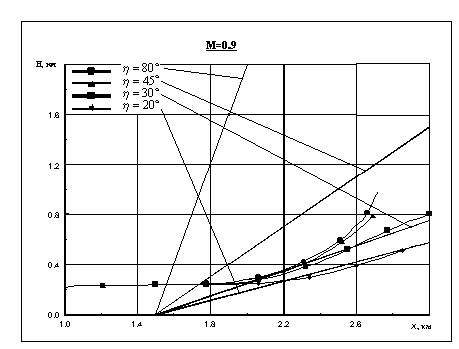 Рис.5.17 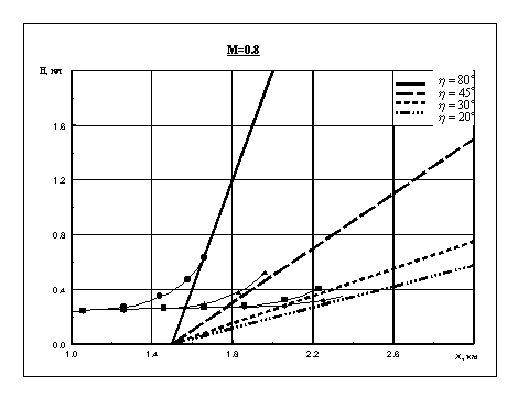 Рис.5.18 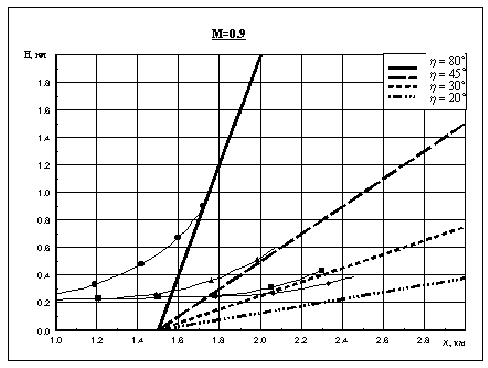 Рис.5.19 Исследования показывают недостаточно высокую эффективность традиционных алгоритмов (см. рис.5.16, 5.17) при уводе от наклонной плоскости. Так, "протыкание" препятствия объектом происходит уже при достижении угла ЛИТЕРАТУРА Акимов А.Н. Информационное взаимодействие летчика с системами ограничения предельных режимов полета. // Научно-методические материалы по обеспечению безопасности полетов. М.: ВВИА им. проф. Н.Е. Жуковского, 1984. Акимов А.Н., Андреев В.В. Метод прямой оптимизации. Основные положения и порядок применения. - М: ВВИА им. Н.Е. Жуковского, 1997. Акимов А.Н., Андреев В.В. Численный метод прямой оптимизации в задачах оптимального управления //Теория и системы управления. 1996. №3. Акимов А.Н. Метод идентификации отказов динамических систем //Автоматика и телемеханика. 1992. №6. Акимов А.Н., Воробьев В.В. Методика и алгоритмы увода летательного аппарата от пространственной поверхности ограничения. //Автоматика и телемеханика. №7, 2001. Акимов А.Н., Воробьев В.В. Ограничение пилотажных параметров маневренного самолета. // Проблемы безопасности полетов.– М.: ВИНИТИ, №3, 2001. Акимов А.Н., Воробьев В.В., Лукашов С.В. Алгоритм предотвращения столкновения самолета с земной поверхностью. // Проблемы безопасности полетов. - М.: ВИНИТИ, 1998г, с.47-50. Акимов А.Н., Воробьев В.В., Лукашов С.В. Предупреждение столкновения самолета с рельефом местности путем увода по пространственным траекториям. // Труды Научных чтений, посвященных памяти авиаконструктора И.И. Сикорского. Москва – Санкт-Петербург, 25-29 мая 1999 г. 3-1. Акимов А.Н., Воробьев В.В., Федюнин М.Ю Алгоритм функционирования адаптивной системы ограничения угла атаки. Обеспечение безопасности полетов: Научно-методические материалы. – М.: ВВИА им. Н.Е. Жуковского, 1995г. Акимов А.Н., Воробьев В.В., Ферапонтов И.С Алгоритмической обеспечение системы повышения безопасности маловысотного полета. Обеспечение безопасности полетов: Научно-методические материалы. – М.: ВВИА им. Н.Е. Жуковского, 1996г. Алашев О.Ю., Гуськова Н.А., Диденко Ю.И., Клеванский И.И., Насретдинов Т.Н. Основные функции системы ограничения предельных режимов. // Труды ЦАГИ, вып.2516, 1994. Аралов Г.Д. Автоматизация систем управления и безопасность полетов. // Проблемы безопасности полетов.– М.: ВИНИТИ, 2000. Афанасьева Л.А., Железняков Ю.Д., Кофман В.Д. и др. Усовершенствованная система предупреждения опасного сближения с землей (по материалам зарубежной печати). // Проблемы безопасности полетов.– М.: ВИНИТИ, 2001. Безопасность полетов летательных аппаратов. / Под ред. В.С.Иванова. – М.: ВВИА им. Н.Е. Жуковского, 2003. Безопасность полетов летательных аппаратов: Методические основы. / Под ред. А.Н. Старикова - М.: Транспорт, 1988. Буков В.Н. Адаптивные прогнозирующие системы управления полетом. - М.: Наука, 1987. Буков В.Н. Оптимальные алгоритмы в задачах с ограничениями управляемых координат //Изд. АН СССР. Техническая кибернетика, 1982, №2. Буков В.Н., Рябченко В.Н., Кулабухов В.С., Наумов А.И., Косьянчук В.В., Горюнов С.В. Основы интеграции систем авиационного оборудования. - М.: ВАТУ, 2001. Бюшгенс Г.С., Студнев Р.В. Аэродинамика самолета. Динамика продольного и бокового движения. - М.: Машиностроение, 1979. Вентцель Е.С., Овчаров Л.А. Теория вероятностей и ее инженерные приложения. - М.: Наука, 1988. Воробьев В.В. Модифицированный метод идентификации отказов в динамических системах. //Автоматика и телемеханика. №11, 2000. Воробьев В.В. Проблемы безопасности полетов при маневрировании на малой высоте. // Проблемы безопасности полетов.– М.: ВИНИТИ, №11, 2000. Воробьев В.В., Лукашов С.В. Повышение безопасности полета маневренного самолета при пилотировании на малой высоте. Труды XXXIV научных чтений, посвященные разработке творческого наследия К.Э. Циалковского, Калуга, 1999г. Воробьев В.Г., Зубков Б.В., Уриновский Б.Д. Технические средства и методы обеспечения безопасности полетов. – М.: Транспорт, 1989. Выгодский М.Я. Справочник по высшей математике.– М.: Государственное издательство технико-теоретической литературы, 1958. Гантмахер Ф.Р. Теория матриц. - М.: Наука, 1988. Горлач Л.В., Кальченко А.Г. Основы организации летной работы и безопасность полетов. - М.: Транспорт, 1988. Денисов В.Г., Онищенко В.Ф. Инженерная психология в авиации и космонавтике.– М.: Машиностроение, 1972. Жмеренецкий В.Ф. Научно-методические основы построения и функционирования бортовых комплексных систем обеспечения безопасности полетов. // "Проблемы безопасности полетов". М.: ВИНИТИ, 1998г. – с. 25 – 32. Жулев В.И., Иванов В.С. Безопасность полетов летательных аппаратов. - М.: Транспорт. 1986. Итоги науки и техники. Серия "Воздушный транспорт". Том 16, Медицинские и психологические аспекты безопасности полетов. / Под ред. профессора Н.М. Рудного.– М.: ВИНИТИ, 1987. Катков С.В., Петров А.М. Активная система обеспечения безопасности полетов при атаке наземной цели.// Обеспечение безопасности полетов. НММ / Под ред. С.А. Попыталова.– М.: ВВИА им. проф. Н.Е. Жуковского, 1991, с 103-108. Качалкин А.Н., Кибардин Ю.А. К вопросу о формировании критической поверхности. // Научно-методические материалы по обеспечению безопасности полетов. М.: ВВИА им. проф. Н.Е. Жуковского, 1984. Котик М.Г., Филипов В.В. Полет на предельных режимах. – М.: Воениздат, 1977. Кочетков Ю.А., Кулифеев Ю.Б., Подобедов В.А. Математические модели датчиков. Исследования по аэроавтоупругости.– М.: Труды ВВИА им. Н.Е. Жуковского, 1978. Красовский А.А. Аттракторы и синтез управлений в критических режимах. // Известия академии наук. Теория и системы управления, №3, 1996. Красовский А.А. Справочник по теории автоматического управления. - М.: Наука, Гл. ред. физ.-мат. лит., 1987. Красовский А.А., Буков В.Н., Шендрик В.С. Универсальные алгоритмы оптимального управления непрерывными процессами. - М.: Наука, 1977. Майоров А.В., Москатов Г.К., Шибанов Г.П. Безопасность функционирования автоматизированных объектов. - М.: Машиностроение, 1988. Медников В.И. Динамика полета и пилотирование самолетов. Учебник.– Монино, 1976. Медников В.И. Маневрирование на самолете-истребителе.– М.: Воениздат, 1975. Нелюбов А.И., Новад А.А. Динамика полетов боевых летательных аппаратов. - М.: ВВИА им. Н.Е.Жуковского, 1992. Погребняк В.И. Аварийность в вертолетной авиации. // Проблемы безопасности полетов. – М.: ВИНИТИ, 2001 г. Пономаренко В.А.. Авиация – белое и черное.– М., 1995. – 456 с. Правила расследования авиационных происшествий и авиационных инцидентов с государственными воздушными судами в Российской Федерации (ПРАПИ – 2000). – М.: Военное издательство, 2000. Туманов Б.М. Основная предпосылка к происшествиям – нищета ВВС. // Независимое военное обозрение, 1.08.2000. Уколов И.С., Кирсанов Б.В., Носков Ю.В. Обеспечение безопасности полета с помощью активной системы управления /Вопросы кибернетики. Проблемы авиационной и космической кибернетики. -М.: Научный совет АН СССР по космической проблеме "Кибернетика", 1981. Хейфец Л.Ф. Система обеспечения полета самолета в режиме следования рельефу местности.// "Проблемы безопасности полетов".– М.: ВИНИТИ, 1983. William B/ Scott / Edwards AFB, Calif. Automatic GCAS: 'You can't fly any lower'. // Aviation week & space technology. / February 1, 1999, p 76–80. Geoffrey J. Jeram Open design for helicopter active control systems. // American Helicopter Society 58th Annual Forum, Montreal, Canada, 2002. Proctor Paul. Helmet displays boost safety and lethality. // Aviation week & space technology. / February 1, 1999, p 81–82. Proctor Paul. Integrated cockpit safety system certified. // Aviation week & space technology. / 1998, № 14, 61. Safety campaign is failing to cut CFIT death to. // Air Traffic Manag. – 1998. – 7, № 1 – p 4. СОДЕРЖАНИЕстр. ВВЕДЕНИЕ………………………………………………………….. 3БОРТОВЫЕ СИСТЕМЫ ОГРАНИЧЕНИЯ. СОСТОЯНИЕ ВОПРОСА. ПОСТАНОВКА ЗАДАЧИ………….………… 5 Аварийность самолетов военного назначения….…………. 5 Эксплуатационные и предельные режимы полета…..……. 9 Основные виды ограничений при пилотировании ЛА...…. 10 Психологические особенности летчика при пилотировании вблизи ограничений………………………………………..… 15 Классификация бортовых систем ограничения предельных режимов полета. Типовые алгоритмы их функционирования .. ………………………………………….19 Анализ существующих методов синтеза систем выдерживания ограничений. Постановка задачи исследований…………….... …………………………………. 27 МЕТОД АДАПТИВНОГО ВЫДЕРЖИВАНИЯ ОГРАНИЧЕНИЙ НА КОМПОНЕНТЫ ВЕКТОРА СОСТОЯНИЯ ДИНАМИЧЕСКОЙ СИСТЕМЫ…………… 30 Содержательная постановка задачи……..………………….. 30 Общий случай выдерживания ограничения…….………….. 32 Доказательство аналогии метода выдерживания ограничений фундаментальному закону равнопеременного движения.... 38 Синтез алгоритмического обеспечения адаптивной системы ограничения для частных моделей ДС……………………... 41 Некоторые способы описания стационарных поверхностей ограничения…………………………………………………… 41 Алгоритм ограничения детерминированной линейной непрерывной динамической системы…………………….… 45 Алгоритм ограничения детерминированной непрерывной управляемой многоуровневой динамической системы.…... 46 АЛГОРИТМЫ АДАПТИВНОГО ОГРАНИЧЕНИЯ ПИЛОТАЖНЫХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ………………………………………………... 49 Адаптивное ограничение угла атаки маневренного самолета………………………………………………………. 49 Особенности выдерживания ограничений на наблюдаемые параметры движения маневренного самолета..……………. 56 Ограничение угла крена вертолета…………………………. 62 Ограничение в пространстве двух компонент вектора состояния (на примере задачи ограничения угла атаки и скольжения маневренного самолета)……………………….. 66 АЛГОРИТМЫ АДАПТИВНОГО ОГРАНИЧЕНИЯ ТРАЕКТОРНЫХ ПАРАМЕТРОВ ДВИЖЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ……………………………. 71 Общий случай ограничения траектории движения летательного аппарата в трехмерном пространстве состояний ……………………………………………………. 71 Содержательная постановка задачи…………………….…. 71 Модель объекта и поверхности ограничения……………... 72 Вывод расчетных зависимостей алгоритма ограничения… 73 Частные задачи ограничения траекторных параметров движения в вертикальной и горизонтальной плоскости …. 76 Увод самолета в вертикальной плоскости………………… 76 Увод самолета в горизонтальной плоскости………………. 82 Синтез алгоритмов выдерживания ограничений в рамках диапазона высот и скоростей полета…………………………86 Особенности выдерживания нестационарных ограничений..89 УВОД САМОЛЕТА ОТ ПОВЕРХНОСТЕЙ ОГРАНИЧЕНИЯ ПО ПРОГРАММИРУЕМЫМ ТРАЕКТОРИЯМ…………… 92 Содержательная постановка задачи…………………………. 92 Алгоритмы расчета углов положения самолета в пространстве при уводе его от препятствия…………………94 Условия включения "увода"…………………………………. 97 Формирование управлений…………………………………. 100 Решение частных задач увода ЛА от препятствий…………101 Вертикальная стенка…………………………………………102 Наклонная плоскость………………………………………. 106 Сравнительный анализ алгоритмов "Увод"…………….… 108 ЛИТЕРАТУРА…………………………………………………….… 112 СОДЕРЖАНИЕ……………………………………………………… 117 |