Системы ограничения. Текст монографии. Адаптивность к свойствам объекта, форме поверхности ограничения
 Скачать 4.57 Mb. Скачать 4.57 Mb.
|

3.4. Ограничение в пространстве двух компонентвектора состояния (на примере задачи ограниченияуглов атаки и скольжения маневренного самолета)В предыдущих параграфах рассмотрены задачи ограничения одной из компонент вектора состояния летательного аппарата, а также величин вычисляемых на их основе. В этом параграфе рассматривается задача выдерживания двумерных, связанных между собой ограничений. Рассмотрим модельную задачу выдерживания границ эксплуатационной области в сечении где Г  раницу эксплуатационной области зададим сечением пространства Х в координатах Сплошная линия характеризует стандартную настройку для однопараметрической системы ограничения угла атаки. Получим расчетные зависимости алгоритма выдерживания ограничения для границы, заданной уравнением и обусловленной положительными значениями угла скольжения β. В соответствии с приведенным рисунком, параметры уравнения линии ограничения (3.35) заданы в виде Тогда кратчайшее расстояние от произвольной точки М(х), характеризующей состояние объекта ограничения в пространстве Х до границы (3.35) определится как где В соответствии с изложенной методикой, для данного описания движения самолета системой (3.34) применимы уравнения синтеза системы выдерживания ограничений рассмотренные применительно к детерминированной линейной непрерывной динамической системе в стационарном случае. А именно  где Задавшись управлением ограничения в виде где расстояние до границы ограничения первая производная от расстояния располагаемое ускорение торможения  (3.40) (3.40)коррекция управления на этапе ограничения  . (3.41) . (3.41)Работа алгоритма выдерживания ограничения в координатах При моделировании задача ограничения формулировалась следующим образом – обеспечить непротыкание линии ограничения в координатах 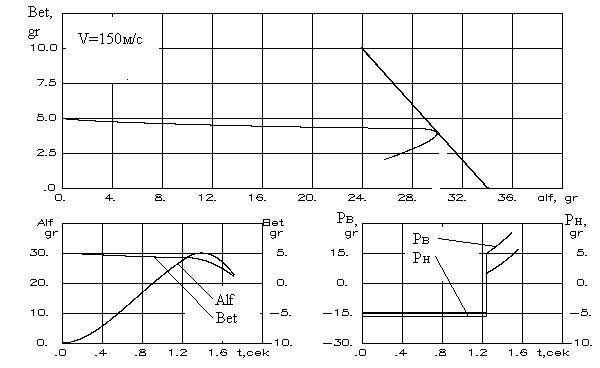 Рис.3.13 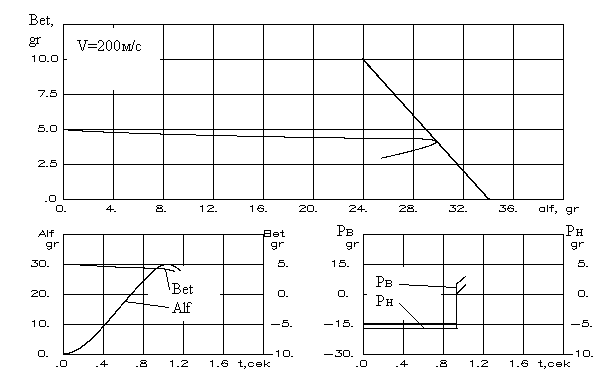 Рис.3.14 Анализ результатов моделирования показывает высокую эффективность выдерживания ограничения. Кроме того, можно сделать вывод об адаптивности метода к режимам полета. Так, снижение скорости полета самолета лишь изменяет момент времени включения алгоритма ограничения. |