Системы ограничения. Текст монографии. Адаптивность к свойствам объекта, форме поверхности ограничения
 Скачать 4.57 Mb. Скачать 4.57 Mb.
|

3.2. Особенности выдерживания ограниченийна наблюдаемые параметры движенияманевренного самолетаНеобходимо отметить, что большой спектр практических задач по исследованию динамических систем базируется на измерении компонент, не входящих в вектор состояния посредством комплекса датчиков. В данном параграфе рассматриваются особенности метода выдерживания ограничений на компоненты вектора наблюдений динамической системы на примере ограничения нормальной перегрузки маневренного самолета. При этом для упрощения задачи сделано допущение о полнокомпонентном, мгновенном измерении интересующих параметров. Пусть движение объекта управления описывается дифференциальным уравнением вида а вектор наблюдений представлен выражением где y – n-мерный вектор выхода, определенный в пространстве Запишем уравнения (3.12) и (3.13) в форме "вход-выход". Для этого выразим вектор х из (3.13) и подставим полученное выражение в (3.12). После выполнения соответствующих преобразований окончательно имеем Отметим, что в (3.14) и далее в случае наличия особенностей матрицы С знак обращения матрицы следует заменить на знак псевдообращения. Зададим в пространстве где а –матрица строка соответствующей размерности, с – скаляр,и получим для динамической системы, представленной математической моделью (3.14), основные соотношения алгоритма управления (2.20) адаптивной системы выдерживания ограничений на компоненты вектора у. При этом будем считать, что пространство Итак, в соответствии с изложенной методикой взвешенное расстояние до границы (3.15) определяется уравнением Дифференцирование выражения (3.16) по времени позволяет получить следующие зависимости Обеспечение или с учетом соответствующих преобразований В (3.20) Применим изложенный здесь подход к задаче ограничения нормальной перегрузки. Пусть движение самолета описывается системой линейных дифференциальных уравнений второго порядка  . (3.21) . (3.21)В качестве наблюдаемых параметров будем рассматривать нормальную перегрузку Т  огда, задавшись в пространстве Y ограничением Итак, Уравнения (3.23) – (3.26) являются основными зависимостями алгоритма функционирования адаптивной системы ограничения нормальной перегрузки при использовании доступной информации о параметрах движения самолета. На рис.3.7 представлены переходные процессы выхода самолета на перегрузку в условиях ограничений, как в идеальных условиях, так и при учете датчиков полетной информации. 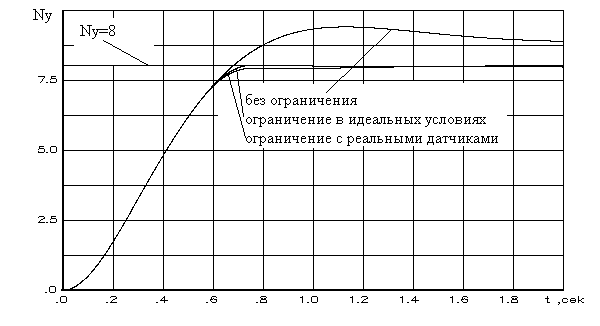  Рис.3.7 В работе использовалась модель датчиков в виде динамической системы второго порядка с генераторами погрешностей в виде [35]  (3.27) (3.27)где Как видно из результатов моделирования алгоритм ограничения нормальной перегрузки робастен к погрешностям реальных датчиков. На рис.3.8 приведены результаты оценки влияния постоянной времени рулевого привода на точность выдерживания ограничения где Трп – постоянная времени рулевого привода; kус – коэффициент усиления; Δу, Использование в проведенных исследованиях выражения (3.28) явилось следствием допущения о том, что влияние сжимаемости рабочей жидкости рулевого привода и инерционности нагрузки мало. Это возможно при небольших габаритах и массе рулевого привода, что и имеет место на современных самолетах. 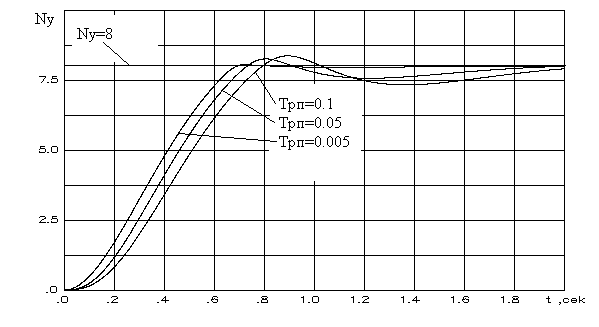 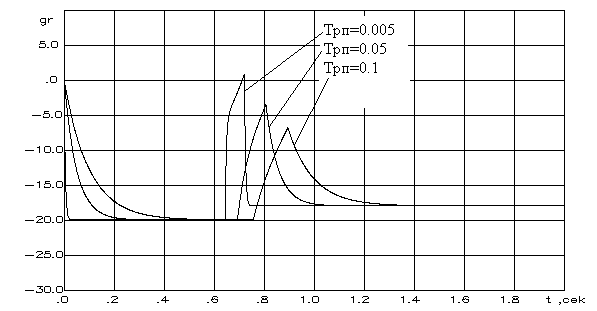 Рис.3.8 Анализ полученных результатов показывает, что точность выдерживания ограничения |