Системы ограничения. Текст монографии. Адаптивность к свойствам объекта, форме поверхности ограничения
 Скачать 4.57 Mb. Скачать 4.57 Mb.
|

2.4.3. Алгоритм ограничения детерминированнойнепрерывной управляемой многоуровневойдинамической системыШирокий класс динамических систем, в том числе и описание траекторного движения ЛА, допускает при описании использовать многоуровневую систему векторных дифференциальных уравнений в форме Коши. Рассмотрим двухуровневую ДС, представленную в виде  (2.44) (2.44)где Рассмотрим получение основных расчетных зависимостей для адаптивной системы ограничения, алгоритм функционирования которой представлен условием (2.20). Пусть при этом граничная гиперплоскость, являющаяся касательной к поверхности ограничения Повторное дифференцирование по t с учетом (2.44) дает следующее выражение Положив в векторной функции И, наконец, записав в приращениях выражение (2.46) и выразив из него величину где В итоге для алгоритма работы системы выдерживания ограничений (2.20) получены его составляющие, а именно Таким образом, в спектре описания динамических систем детерминированными непрерывными моделями получена алгоритмическая основа решения задач адаптивного ограничения вектора состояния ДС. Последующие главы посвящены конкретным случаям ограничения параметров движения и их совокупности такой сложной динамической системы, как летательный аппарат. Глава 3. Алгоритмы адаптивного ограниченияпилотажных параметров летательныхаппаратов3.1. Адаптивное ограничение угла атаки маневренного самолетаВ первом разделе рассматривались недостатки системы ограничения угла атаки с фиксированной настройкой параметров. Применим метод адаптивного ограничения компонент вектора состояния динамической системы к задаче ограничения угла атаки в изолированном продольном движении. Пусть продольное короткопериодическое движение самолета описывается системой уравнений второго порядка вида  (3.1) (3.1)В (3.1) все обозначения общепринятые. Для отработки методических вопросов синтеза алгоритмов системы ограничения система управления самолетом задана совокупностью управлений от летчика, демпфера тангажа и автомата продольной устойчивости по углу атаки Коэффициенты в (3.2) являются функциями режима полета, то есть Будем полагать, что ограничение где При этом превышение Расстояние от точки, характеризующей текущее состояние объекта ограничения до границы (3.3) определяется выражением (2.35). Сделав соответствующие подстановки, для рассматриваемого случая получим очевидное равенство  . (3.4) Зададим управление ограничение в виде соответствующем закону (2.20)  (3.5) (3.5)Здесь В соответствии с изложенным методом, найдем первую и вторую производные от расстояния d, величину Для получения компоненты уравнения (2.14)  (3.7) (3.7)В итоге выражение, определяющее момент срабатывания системы ограничения угла атаки примет следующий вид где коэффициент  и зависит от: и зависит от: собственных свойств самого объекта, с учетом системы улучшения устойчивости и управляемости; доверенного системе управления ограничения; эффективности управления; текущих значений Заметим, что структура выражения (3.8) существенно отличается от традиционно принятой где Во-первых, вместо первой степени темпа изменения угла атаки в (3.9) в (3.8) используется квадрат этой величены. Во-вторых, коэффициент К стал вычисляемым коэффициентом. Причем, даже при изменении в результате возможных отказов собственных свойств объекта ограничения, его характеристик устойчивости и управляемости, алгоритм ограничения соответствующим образом подстраивается к новым условиям. Это достигается с помощью процедуры текущей идентификации отказов, например, с использованием метода, подробно рассмотренного в работах [4, 21]. Помимо этого, для поддержания Проведя соответствующие преобразования, имеем  . (3.10) . (3.10)Необходимо отметить, что аналогичные развернутые выражения для Использование (3.5), (3.8) и (3.10) обеспечивает строгое решение задачи ограничения угла атаки с полным учетом всех основных факторов, влияющих на динамику движения ЛА. Рассмотрим модельную задачу ограничения угла атаки маневренного самолета с использованием изложенных алгоритмов. В качестве математической модели объекта управления воспользуемся системой (3.1), функционирующей совместно с законом управления (3.2). Пусть самолет получил управление Отключение алгоритма ограничения возможно, например, при достижении условия  . (3.11) . (3.11)Могут применяться и другие условия и методики отключения системы ограничения угла атаки. На рис.3.2 представлены результаты решения модельной задачи ограничения угла атаки на уровне 24° при различных начальных настройках системы ограничения и идеальных рулевых приводах. 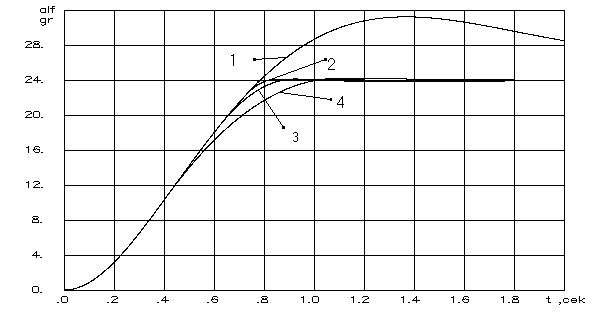 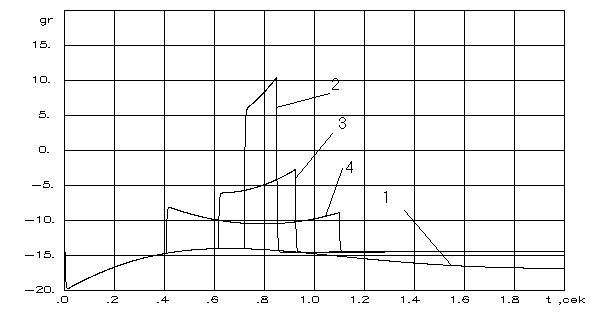 1 – переходный процесс при отсутствии системы ограничения; 2 - Рис.3.3 Причем на график выводилось не отклонение ручки управления самолета, а отклонение по времени стабилизатора Из рисунка видно, что чем меньше значение управления ограничения – угловое положение, в которое переводится стабилизатор, тем раньше система ограничения вступает в работу и тем больше по времени проходит процесс ограничения. На рис.3.3 представлены результаты моделирования процесса ограничения угла атаки на уровне 24º при различных исходных скоростях полета. Налицо адаптивные свойства алгоритма к изменению режима полета. 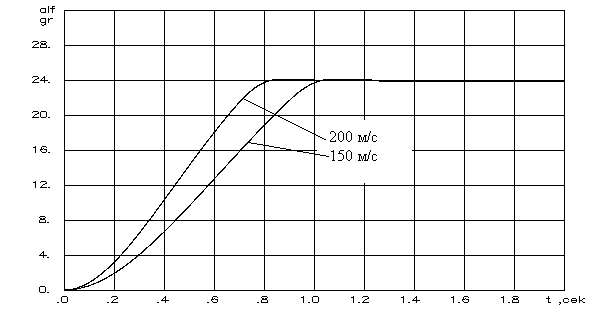 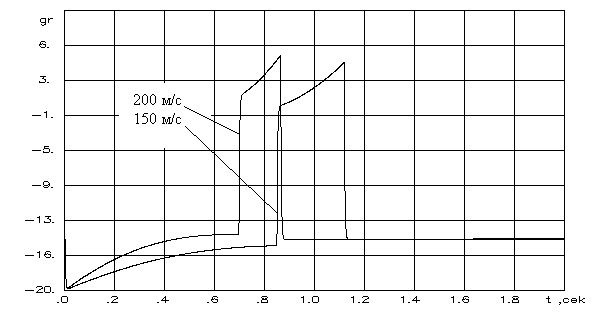 Рис.3.3 Оценка алгоритма ограничения на робастность к исходной информации о собственных свойствах объекта производилась путем загрубления его аэродинамических характеристик. Так, на рис.3.4 приведены результаты моделирования процесса ограничения угла атаки при различных значениях аэродинамического коэффициента 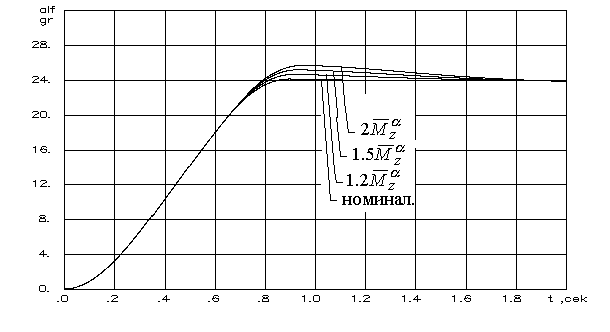 Рис.3.4 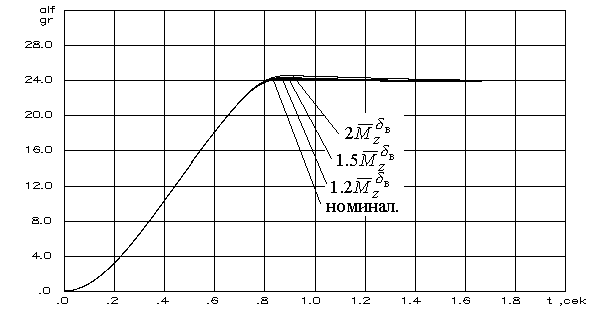 Рис.3.5 Из приведенных рисунков видно, что даже двукратная ошибка в настройке указанных коэффициентов приводит к превышению допустимого угла атаки лишь на 5 … 8%. Ошибки в настройке других коэффициентов оказывают еще меньшее влияние. Это свидетельствует о робастности алгоритма ограничения угла атаки к ошибкам моделирования. Очевидно, что традиционная схема алгоритма ограничения угла атаки не обладает продемонстрированными возможностями. Ее применение эффективно только в узком диапазоне настроечных режимов. Таким образом, полученный алгоритм адаптивного ограничения угла атаки обладает явными преимуществами перед аналогичными традиционными схемами выдерживания угла атаки. |