Системы ограничения. Текст монографии. Адаптивность к свойствам объекта, форме поверхности ограничения
 Скачать 4.57 Mb. Скачать 4.57 Mb.
|

2.3. Доказательство аналогии метода выдерживанияограничений фундаментальному законуравнопеременного движенияРассмотрим задачу выдерживания ограничений для объекта, представленного системой дифференциальных уравнений второго порядка  (2.21) (2.21)Модель (2.21) описывает движение материальной точки в заданном направлении. Здесь X – изменение линейной координаты объекта, V – скорость, a – ускорение. Система (2.21) решается с начальными условиями Задачу выдерживания ограничений сформулируем следующим образом. Необходимо включить управление в момент достижения объектом некоторой координаты 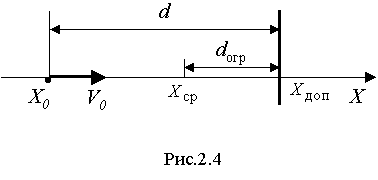 Рис.2.4 Эту же задачу можно сформулировать иначе. Для произвольной скорости V найти координату точки С учетом известного общего решения системы (2.21)  (2.23) (2.23)для участка торможения где то доопределим (2.24) уравнением Равенство (2.26) получено в результате решения второго уравнения системы (2.21) и записано с учетом (2.25) для интервала Обозначив Нетрудно заметить, что выражение (2.28) полностью совпадает с (2.14). Таким образом, на примере двойного интегрирующего звена получено точное аналитическое решение для расчета длины участка ограничения, что доказывает справедливость выкладок, приведенных для общего случая. Результаты моделирования процесса выдерживания ограничения 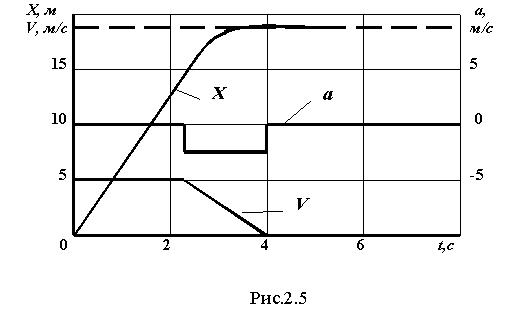 Рис.2.5 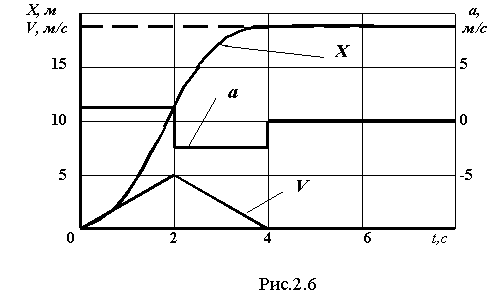 Рис.2.6 В дальнейшем задача управления будет ограничена процессом предотвращения выхода за контролируемый параметр или параметры. Задача стабилизации на уровне допустимого значения параметра рассматриваться не будет. |