Конспект лекции по гидравлике.. Гидравлика, гидро и пневмоприводы
 Скачать 5.96 Mb. Скачать 5.96 Mb.
|

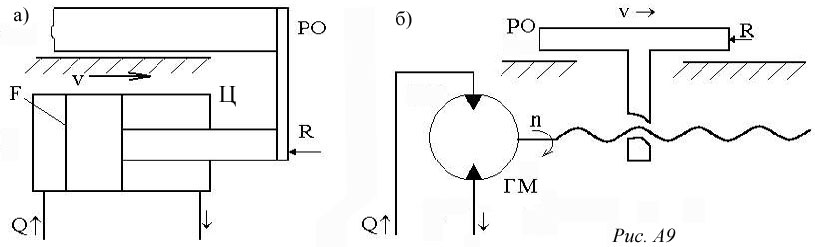
6 Типовые функциональные гидросхемы6.1 Реверсирование движения рабочего органа Изменение направления движения рабочих органов обеспечивается: а) с помощью направляющих распределителей (см., например, рис. 3.1-3.4). Варианты гидросхем с распределителями – см. рис. 3.6,а,в, 3.7,г,д, 4.7,б, а также 5.1,в, 5.3, 5.5, 5.7,в и др. б) при использовании гидронасосов с переменным направлением потока (см., например, рис. 1.3, обозначение – рис. 1.5,в). Варианты гидросхем с такими насосами – рис. 5.1,б, 7.4 (насос Н2) 6.2 Регулирование скорости рабочего органа Рабочий орган (РО) станка, робота или иной машины может приводиться гидродвигателем и получать вращательное (рис. 5.1,а) или поступательное движение. Поступательное движение РО может сообщаться как гидроцилиндром (рис. А9,а), так и гидромотором через реечную или, чаще, винтовую передачу (рис. А9,б).
Поскольку Изменение подачи масла обеспечивается: 1) посредством дросселей при использовании нерегулируемых насосов -т.н. системы дроссельного регулирования (рис. 5.3; 5.5; 7.1; 7.2 и др.), 2) в системах машинного (или объемного) регулирования: - регулируемым насосом (рис. 5.1,б,в; 7.4), - суммированием подачи от нескольких нерегулируемых насосов (рис.4.10; 7.2), – т.н. ступенчатое регулирование. Любому способу регулирования присущи свои достоинства и недостатки. 6.2.1 Дроссельное управление скоростью гидродвигателя
Примем: - S = сonst, - давление в сливной линии ра= сonst, - давление в напорной линии при работе под нагрузкой pк = сonst (определяется настройкой переливного клапана К). Для упрощения, потери давления в элементах гидросистемы кроме дросселя учитывать не будем. Тогда:
а то перепад давлений на дросселе Достоинством систем с дроссельным регулированием является их относительная простота. Однако из-за затрат мощности на дросселирование их КПД=0,65-0,67 и такие системы применяют при небольших мощностях (до 3-3,5 кВт). При дросселировании на входе расход мощности меньше (из-за отсутствия противодавления). При дросселировании на выходе движение рабочего органа более плавное, т.к., с одной стороны, при наличии противодавления обеспечивается стабилизация сил трения, а с другой – компенсируются утечки в распределителе и цилиндре работой переливного клапана. 6.2.2 Стабилизация скорости рабочего органа при дроссельном управлении Для регулирования и стабилизации скорости применяют регуляторы расхода (регуляторы потока, регуляторы скорости). В системах с дросселем на выходе применяются регуляторы расхода, состоящие из последовательно установленных редукционного клапана прямого действия и дросселя (рис. 5.4). Колебания технологической нагрузки R на штоке цилиндра в такой системе вызывают колебания противодавления pпр, но редукционный клапан обеспечивает постоянство давления перед дросселем. В результате будет иметь место постоянство перепада давлений на дросселе и подачи масла через него независимо от величины технологического сопротивления на штоке цилиндра.
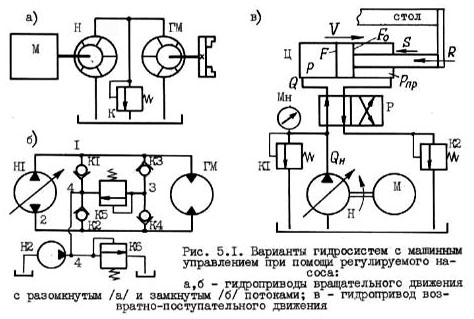
а) быстрый подвод, б) рабочий ход с регулируемой скоростью, независимой от нагрузки, в) быстрый отвод. Гидропотоки, обеспечивающие указанные такты цикла, следующие: а) Р1–II; Р2–I: б) кулачок К переключает в) Р1–I: - в начале отвода: - по окончании действия кулачка К Регуляторы расхода могут иметь и другой состав аппаратов, например, клапан разности давлений (рис. 4.2,а) и дроссель, установленные параллельно один другому (на рис. 7.2 – ДР1, ДР2 и К3). Такие комбинации аппаратов применяются в системах с дросселем на входе. 6.2.3 Машинное упpавление скоpостью гидpодвигателя 6.2.3.1. В гидроприводе вращательного движения по рис. 5.1,а скорость выходного звена (вала гидромотора) может изменяться с помощью регулируемого насоса, регулируемого мотора или с помощью обеих указанных гидромашин. При использовании регулируемого насоса привод будет обеспечивать постоянство крутящего момента на валу гидромотора. При использовании регулируемого мотора будет постоянной развиваемая им мощность. Использование регулируемых насоса и мотора позволяет обеспечить требуемое соотношение характеристик привода и увеличить диапазон регулирования скорости. 6.2.3.2. В схеме по рис. 5.1,б регулирование частоты гидромотора и реверсирование производится с помощью насоса Н1. Гидропотоки при этом будут следующими: При перегрузке циркуляция масла идет по контуру: в зависимости от того, какая линия является напорной (1 или 2). Клапан К5 является предохранительным. Подпитывание замкнутой системы производится вспомогательным насосом Н2 через обратный клапан К1 (если линия 1 – всасывающая) или К2 (если линия 2 – всасывающая). Требуемое давление подпитывания (обычно 0,3-0,5 МПа) обеспечивается с помощью переливного клапана К6. 6.2.3.3. Рассмотрим вариант гидропривода возвратно-поступательного движения (рис. 5.1,в). В нем: Н – регулируемый насос, К1 – предохранительный и К2 – подпорный (до 0,15 МПа – для стабилизации сил трения) клапаны.
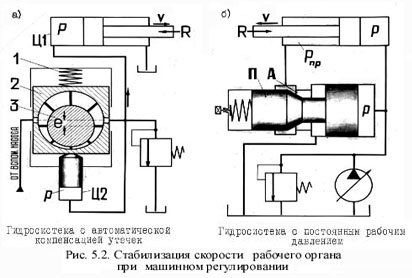
что получается из-за возрастания объёмных потерь Плавность хода тем выше, чем меньше Λ. Так как v уменьшается с увеличением Однако способ достаточно экономичен, т.к. во-первых, мощность пропорциональна нагрузке на поршне (N = p×Qн), и во-вторых, поскольку подачей масла (Qн) регулируется v, то чем меньше v, тем потребляемая мощность меньше. Т.е. мощность устанавливается применительно к конкретному режиму работы. Такие системы предпочтительнее в мощных станках. Т.к. в системах не используются дроссели, а значит нет потерь мощности на дросселирование потока масла, то КПД систем с машинным управлением достаточно высок. 6.2.4 Стабилизация скорости рабочего органа при машинном регулировании Рассмотрим некоторые гидросистемы, обеспечивающие постоянство v независимо от R при машинном регулировании. 6.2.4.1 Гидросистема, автоматически компенсирующая утечки (рис. 5.2,а)
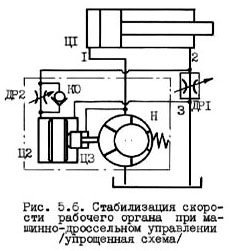
6.2.5 Машинно-дроссельное управление регулированием скорости гидродвигателя В системах с дроссельным управлением значительная часть потенциальной энергии рабочей жидкости превращается в тепловую энергию; электромотор и гидронасос имеют завышенные мощность и массу; для поддержания температуры рабочей жидкости в допустимых пределах (до +65°С) используют избыточную рабочую жидкость в системе и её принудительное охлаждение. Улучшение энергетических характеристик обеспечивается при использовании в системе с дроссельным управлением регулируемого насоса с регулятором для дистанционного управления подачей. Во многих современных станках с программным управлением и роботах высокой грузоподъёмности используются регулируемые пластинчатые насосы.
поршнем Ц2 влево, увеличивая эксцентриситет. Насос увеличивает подачу масла, что обеспечивает компенсацию просадки скорости. При уменьшении нагрузки на поршне Ц1 возрастает перепад давлений на ДР1, поршень Ц2 смещает статор вправо и подача масла уменьшается. Это происходит до тех пор пока перепад давлений на дросселе не уменьшится до требуемой величины. Т.о., регулятор за счёт изменения подачи насоса поддерживает примерно постоянным перепад давлений на ДР1 и расход через него, обеспечивая постоянство скорости поршня Ц1 независимо от нагрузки. Для демпфирования регулятора установлен дроссель ДР2. Компенсация утечек, зависящих от давления нагнетания, осуществляется изменением подачи насоса при изменении эксцентриситета. Для этого напорная линия 1 связана со вспомогательным цилиндром Ц3 регулятора. 6.3 Синхронизация работы гидродвигателей с помощью делителей потока (расхода) Синхронизация движений нескольких гидродвигателей (т.е. обеспечение равенства скоростей) может обеспечиваться различными способами и устройствами. Наиболее распространены устройства, называемые делителями потока или расхода [с. 141-143]. Рассмотрим возможный вариант делителя потока (рис. 5.7,а,б).
В том случае, если движение одного гидродвигателя по какой-либо причине прекратится, плунжер П полностью перекроет щель, через которую происходит питание другого двигателя и в результате его движение также прекратится. Схемы синхронизации движения нескольких (более 2) гидродвигателей проектируются с последовательным делением потока (рис. 5.7,г). |