Лекц комплекс СМИОСУ 2017. Конспект лекций для магистрантов специальности 6М070200 Автоматизация и управление
 Скачать 4.07 Mb. Скачать 4.07 Mb.
|

Лекция 17 Множество моделей, структуры моделей (часть 2)Идентификацией называется оптимальная в некотором смысле модель, построенная по результатам наблюдений над входными и выходными переменными объекта. Задачей идентификации называется обратная задача системного синтеза. Среди задач идентификации выделяют два типа: Структурная идентификация (в широком смысле слова); Параметрическая идентификация (идентификация в узком смысле слова). Структурная идентификация подразумевает построение модели типа «черный ящик», т.е. об объекте мы ничего не знаем. Главная задача: определение структуры модели. Рекомендации по решению задач структурной идентификации: Определить тип (класс) моделей. а) Начинать построение модели с физической модели (по известным законам физики, не забывая о цели построения модели); б) Начинать с самых простых моделей (линейная, непрерывная, одномерная и т.д.); в) Постараться преобразовать модель к виду линейной регрессии: Определение размера или порядка модели (определение количества внутренних переменных модели). Определение ковариационных (зависимость от шумовых характеристик) и корреляционных (взаимосвязь между определенными двумя внутренними переменными) матриц. Свойства идентификации К основным свойствам относятся: управляемость, наблюдаемость, идентифицируемость. Управляемость – система управляема, если для любого момента времени при любых состояниях существует такое управление u, которое переводит начальное состояние системы в конечное. где n – порядок системы; А – матрица коэффициентов при х; В – матрица коэффициентов при r. Условием управляемости системы является то, чтобы Det uy не был равен нулю. Наблюдаемость – система наблюдаема, если любое или все ее состояния можно непосредственно или косвенно определить по выходному вектору системы. Хотя бы один минор не должен быть равен нулю, в этом случае система наблюдаема. Идентифицируемость – система идентифицируема, если по изменениям координат состояния системы можно определить ее параметры. где V(0) – вектор начальных условий; Ап – матрица перехода. Система идентифицируема, если Det не равен нулю. Идентификация динамических систем Идентификация динамических объектов в общем случае состоит в определении их структуры и параметров по наблюдаемым данным – входному воздействию и выходным величинам. В этом случае объект (элемент системы, объект управления, элемент технологического процесса и т. п.) представляет собой "черный ящик". Исследователю необходимо, подвергая объект внешним воздействиям и анализируя его реакции, получить математическую модель (описание его структуры и параметров), то есть превратить "черный ящик" в "белый ящик", добиться его "информационной прозрачности". Графически процесс идентификации иллюстрирует рисунке 17.2. 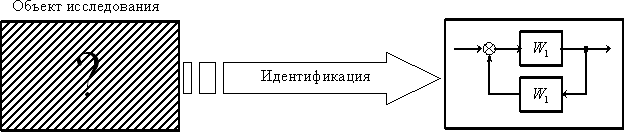 Рисунок 17.2 – Процесс идентификации (принцип черного ящика) Важным моментом этого процесса является выбор точек приложения внешних воздействий и сбор информации о реакциях объекта, то есть размещение управляющих устройств и датчиков. Решается при идентификации объектов и более простая (относительно простая) задача, это задача идентификации параметров, когда заранее известна структура математической модели объекта, но не известны ее параметры. В этом случае говорят о переходе от "серого ящика" к "белому ящику". Графически такой процесс идентификации параметров иллюстрирует рисунок 17.3. 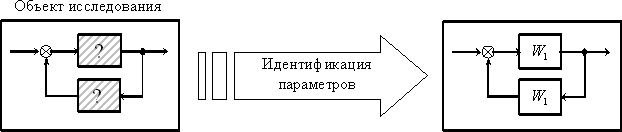 Рисунок 17.3 – Процесс идентификации (принцип серого ящика) Задача идентификации параметров может либо входить компонентом в общую задачу идентификации объекта, либо решаться самостоятельно. Рассмотрим на обобщенной структуре и процедуре процесса идентификации основы подхода к решению задач идентификации. Обобщенная структура процесса идентификации показана на рисунке 17.3. 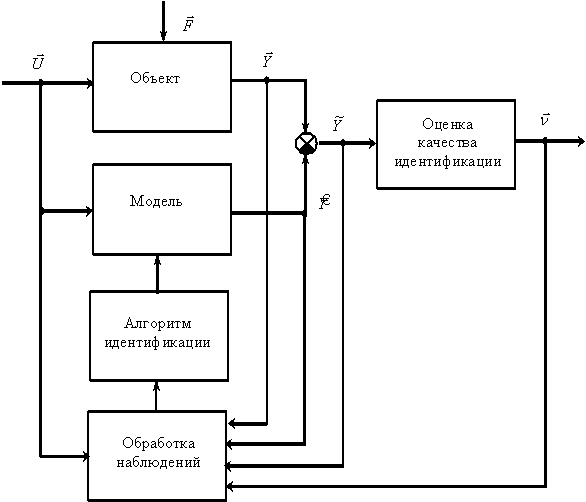 Рисунок 17.3 – Обобщенная структура процесса идентификации Обобщенная процедура идентификации классификация объекта; выбор для определенного класса объекта настраиваемую модель, то есть модель, структуру и параметры которой можно менять в процессе идентификации; выбрать критерий (оценку) качества идентификации, характеризующий в виде функционала доступных для наблюдения переменных отличие модели и объекта; выбрать алгоритм идентификации (механизм настройки модели), обеспечивающий сходимость процесса идентификации, минимум критерия качества идентификации. Методы идентификации принято разделять на две группы: активная идентификация – идентификация вне контура управления, пассивная идентификация – идентификация в контуре управления. Активная идентификация. В этом случае объект исследования выводится из условий нормальной окружающей среды (нормальный режим эксплуатации, номинальные параметры рабочего режима и т. п.). Исследования проводятся в специализированных лабораторных условиях, как это показано на рисунке 2.4. 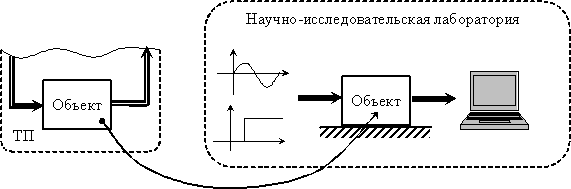 Рисунок 17.4 – Активная идентификация На входы объекта (рабочие и дополнительные) подаются тестовые сигналы специального вида. Это могут быть: ступенчатые и импульсные временные сигналы, гармонические сигналы, случайные воздействия с заданными параметрами. Активную идентификацию используют при разработке новых технологий применительно к действующим промышленным объектам, в изучении новых явлений, в первоначальной разработке математической модели. Пассивная идентификация. При пассивной идентификации объект функционирует в контуре управления, находится в процессе нормальной эксплуатации. На его входы поступают только естественные сигналы управления. Пассивную идентификацию используют для уточнения математической модели, для слежения за изменениями в объекте. Информация оперативно используется в системе управления объектом, процесс такой идентификации иллюстрируется на рисунке 17.5. 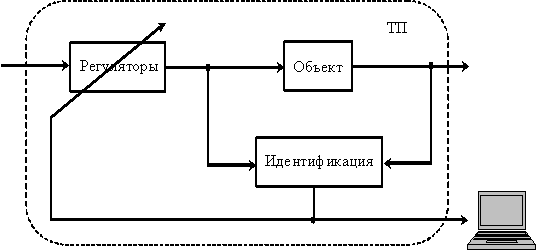 Рисунок 17.5 – Пассивная идентификация Кроме перечисленных групп методов реализуются и системы идентификации смешанного типа, когда объект не выводится из нормального режима эксплуатации, но к управляющим сигналам добавляются тестовые воздействия, позволяющие идентифицировать объект, не ухудшая качества основного процесса управления. Более подробно рассмотрим активную идентификацию. Активная идентификация объектов управления может производиться как во временной области, так и в частотной области. При этом В каждой области используют собственные алгоритмы и методы идентификации. При активной идентификации в большинстве случаев используют полученные в результате экспериментов характеристики: частотные характеристики (АФЧХ, ЛАЧХ, ЛФЧХ и др.), временные характеристики (ступенчатое изменение задания, "узкий" импульс задания и др.). Допустим, динамическая система описана передаточной функцией следующего вида: 1. Получаем систему дифференциальных уравнений первого порядка из n - уравнений  где Y – выходные переменные, U(t) – входные переменные, Х – внутренние переменные. Как получить эту систему? I. а) в) Замена переменной  г) получаем систему n – го порядка дифференциальных уравнений первого порядка. II. C помощью методов пространства состояния. 2. От дифференциальных уравнений переходим к разностным уравнениям  где 3. получаем матрицу перехода: при этом V(к) при е измерений примет значение:  Если  Количество измерений определяется по аналогичной формуле для линейного регрессионного анализа. Подведем некоторый итог. Управляемость. Понятие наблюдаемости и дуальное ему понятие управляемости были впервые введены Калманом в 1960 г. Хотя при обсуждении методов идентификации понятие наблюдаемости важнее понятия управляемости, оба они ввиду их дуальности рассматриваются совместно. Говорят, что система является управляемой, если она может быть переведена из любого состояния x(to) при t=tо в любое другое желаемое состояние x(ti) за конечный интервал времени τ (τ= ti —to) путем приложения кусочно-непрерывного входного воздействия/ Система является неуправляемой, если управляющее входное воздействие u(t) влияет не на все переменные состояния. Кроме того, управляемая замкнутая линейная система может иметь произвольные собственные значения независимо от собственных значений соответствующей разомкнутой системы. B литературе описаны критерии анализа управляемости (и соответственно наблюдаемости) систем. Bce они основаны на рассмотрении канонического уравнения состояния и на полиномиальном разложении ем. Наблюдаемость. Понятие наблюдаемости дополняет понятие управляемости. Если управляемость требует, чтобы каждое состояние системы было чувствительно к воздействию входного сигнала, то наблюдаемость требует, чтобы каждое состояние системы влияло на измеряемый выходной сигнал. Система наблюдаема, если все ее состояние можно непосредственно или косвенно определить по выходному вектору системы. Поэтому, когда определенное состояние (или изменение этого состояния) не влияет на выходной вектор, система ненаблюдаема, точно так же как отсутствие влияния вектора выходного сигнала на определенное состояние означает, что система неуправляема. Кроме того, ненаблюдаемая система не может быть идентифицирована; в терминах ее полной модели в пространстве состояний, очевидно, невозможна идентификация параметров, относящихся к ненаблюдаемым состояниям. Основная литература Современные методы идентификации систем. Под ред. П. Эйкгоффа, М.: Мир, 1983 Ордынцев В. М. Математическое описание объектов автоматизации. – М: Машиностроение, 1965. – 360 с. Гроп Д. Методы идентификации систем. – М: Мир, 1979. – 302 с. Дополнительная литература Практикум по автоматике и системам управления производственными процессами: учеб. пособие для вузов /под ред. И.М.Масленникова. -М.: Химия, 1986. -336с. Семенов А. Д., Артамонов Д. В., Брюхачев А. В. Идентификация объектов управления: Учебн. пособие. - Пенза: Изд-во Пенз. гос. ун-та, 2003.- 211 с. Исмаилов С.У. Современные методы идентификации объектов и систем управления. Методические указания к выполнению лабораторных работ для магистрантов спец. 6М0702. Шымкент, ЮКГУ, 2010 г., -78 с. |