Лекц комплекс СМИОСУ 2017. Конспект лекций для магистрантов специальности 6М070200 Автоматизация и управление
 Скачать 4.07 Mb. Скачать 4.07 Mb.
|

Лекция 19 Определение частотных характеристик.Определение частотных характеристик. Аппроксимация экспериментальных частотных характеристик В лекции рассмотрены методы идентификации объектов управления на основе простейших тестирующих сигналов. Эти методы традиционно применяются в инженерной практике. Рассмотрено определение частотных характеристик при нанесении на вход объекта возмущений периодического характера и аппроксимация экспериментальных частотных характеристик Частотные характеристики динамического звена. Частотной характеристикой динамического звена называют функцию комплексного аргумента , полученную путем формальной замены p на в выражении передаточной функции/ Рассмотренные выше формулы описывают связь между разными видами частотных характеристик. Напомним, что частотную характеристику динамического звена можно определить как отношение спектра (преобразования Фурье) выходного сигнала к спектру входного сигнала. Знание частотной характеристики звена позволяет определить выходной спектр по входному. На рисунке 19.1 показаны частотные характеристики некоторого динамического звена. 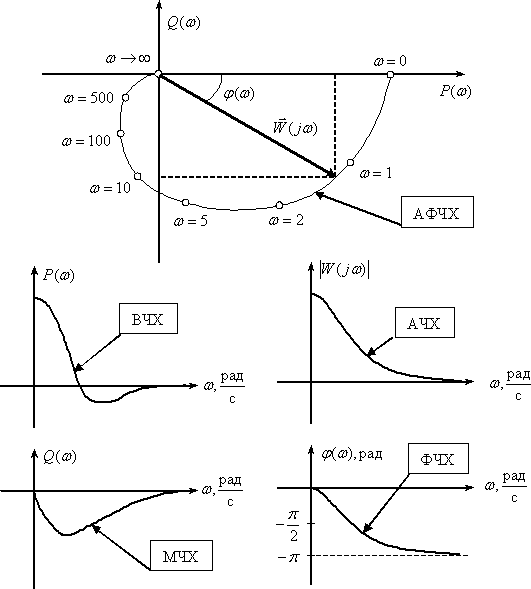 Рисунок 19.1 – Частотные характеристики При подаче на вход линейной системы сигнала: на выходе будет сигнал: Отсюда следует простой алгоритм экспериментального определения частотной характеристики линейного динамического звена, объекта или системы управления для конкретной частоты : подать на вход объекта синусоидальный сигнал частоты и постоянной амплитуды; дождаться затухания свободной составляющей переходного процесса; измерить амплитуду выходного сигнала и сдвиг его по фазе относительно входного сигнала. Отношение амплитуды выходного установившегося сигнала к амплитуде входного сигнала определит модуль частотной характеристики при частоте . Сдвиг фазы выходного сигнала относительно входного сигнала определит угол (аргумент) частотной характеристики при частоте . Применяя данный алгоритм для частот от нуля до бесконечности, можно экспериментальным путем определить частотную характеристику конкретного устройства. Функциональная схема экспериментальной установки для снятия частотных характеристик имеет вид, показанный на рисунке 19.2.. 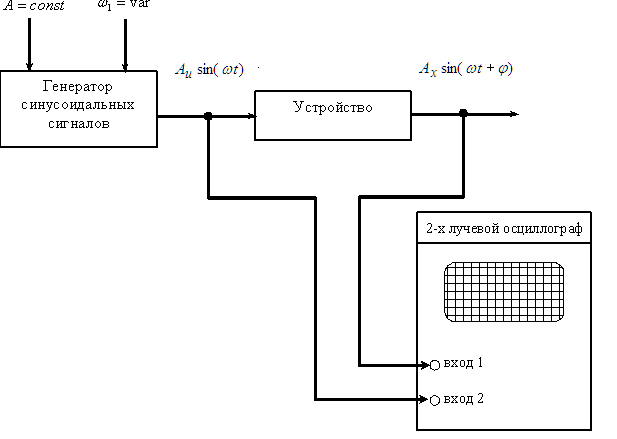 Рисунок 19.2 – Снятие частотных характеристик При частоте на экране осциллографа получаем после затухания свободной составляющей следующую картину, показанную на рисунке 19.3. Отметим, что процедура снятия частотных характеристик - длительная процедура, т.к. в одном опыте – получается только одна точка графика 19.3 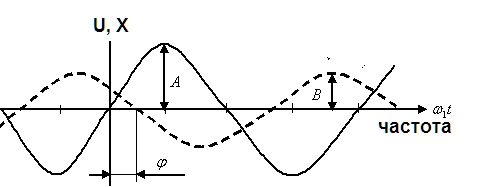 А – амплитуда входного сигнала В - амплитуда выходного сигнала Рисунок 19.3 – Входные и выходные сигналы при снятии частотных характеристик На основании полученных данных можно построить на комплексной плоскости точку, принадлежащую частотной характеристике устройства, а совокупность точек при изменении частоты от нуля до величины, когда амплитуда выходного установившегося сигнала станет пренебрежимо мала, будет представлять собой амплитудно-фазовую частотную характеристику (АФЧХ). Как видно из рисунка, по этим данным может быть построена любая необходимая частотная характеристика устройства. 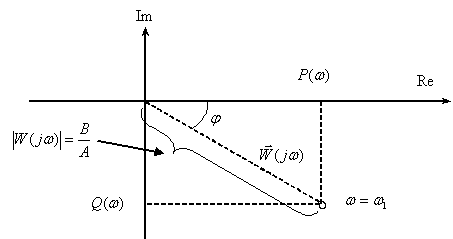 Рисунок 19.4 – График АФЧХ Для экспериментального получения частотных характеристик различных объектов в инженерной практике используют специализированные приборы, а в последнее время широко используют для таких целей персональные компьютеры, оснащенные специализированными платами ввода-вывода и пакетами прикладных программ. Учитывая все вышеизложенное, становится ясным и физический смысл частотной характеристики. Она показывает, во сколько раз изменяет динамическое звено (устройство), работающее в установившемся режиме, амплитуду входной синусоиды частоты , и на какой угол сдвигает входную синусоиду по фазе. Определение передаточной функции объекта по частотным характеристикам. Существует ряд достаточно сложных для вычисления методов, и даже ряд вычислительных устройств для обработки частотных характеристик [1-4], однако на практике они применяются достаточно редко, в основном при анализе быстропротекающих процессов. Рассмотрим один из методов. Этот метод идентификации относится к непараметрическим методам, т. к. вначале экспериментально снимают частотные характеристики объекта, а затем уже по полученным экспериментальным характеристикам вычисляют передаточную функцию. Основные трудности при проведении экспериментов заключаются в определении рабочего диапазона частот и дрейфе оси колебаний на выходе объекта. Чаще всего область рабочих частот задается ориентировочно и наибольшее внимание уделяется диапазону, в котором сдвиг по фазе между входным и выходным гармоническими сигналами составляет 1800. При снятии частотных характеристик используют различные методы воздействия на объект. Метод синусоидальной волны предполагает подачу на вход объекта гармонических колебаний. На каждой из выбранных в пределах рабочего диапазона частот проводится отдельный опыт. На входе исследуемого объекта возбуждаются колебания выбранной частоты. Процессу колебаний дают установиться и, когда ось колебаний, их форма и амплитуда станут неизменными, измеряют амплитуды входных и выходных колебаний и фазовый сдвиг между ними. Частное от деления амплитуды выходных колебаний на амплитуду входных колебаний дает амплитуду частотной характеристики на взятой частоте, сдвиг по фазе – ординату фазовой частотной характеристики. Основным затруднение при использовании этого метода является необходимость возбуждения колебаний большой мощности, имеющих правильную синусоидальную форму. Поэтому чаще применяют метод «прямоугольной» волны. При этом по прибору, измеряющему входную величину объекта, градуируются три положения регулирующего органа, изменяющего эту величину. Среднее положение соответствует значению входной величины, при котором стабилизируется режим работы объекта перед началом испытаний (ось колебаний); два других равноотстоят от среднего положения. Перед началом опыта регулирующий орган устанавливается в среднее положение и удерживается там до установления в объекте стабильного режима. Затем регулирующее устройство через равные промежутки времени, соответствующие полупериоду избранной частоты, переводится из одного крайнего положения в другое и обратно. Эти переключения продолжаются до тех пор, пока на выходе объекта колебания y(t) не примут установившейся формы. После чего производят регистрацию этих колебаний. На основе полученных осциллограмм колебаний на выходе объекта проводят их гармонический анализ, ограничиваясь вычислением амплитуд и фаз первой и третьей гармоник  (19.3) (19.3)где T – период колебаний; к – номер гармоники. В том случае если значения выходной величины известны только в дискретные, равноотстоящие моменты времени интегралы в (19.3) заменяются суммами  (19.4) (19.4)где N – число дискрет выходного сигнала. Гармонический анализ входного прямоугольного сигнала приводит к такому выражению где А – амплитуда прямоугольной волны. Вычислив амплитуды и фазы входных и выходных гармонических составляющих можно вычислить значения амплитудно-частотной характеристики на выбранной частоте, как отношение амплитуд гармонических составляющих на выходе и входе объекта и значения фазо - частотной характеристики, как соответствующий фазовый сдвиг ϕк. Для повышения точности определения частотных характеристик рекомендуется использовать при гармоническом анализе только первую гармонику. Для того чтобы не допускать больших отклонений регулируемой величины в процессе проведения опытов переключения регулирующего органа осуществляют в моменты времени, когда регулируемая (выходная) величина достигает заранее выбранные граничные значения. Для реализации такого режима используют двух позиционный регулятор с регулируемой зоной нечувствительности. Изменяя величину зоны нечувствительности и знак обратной связи можно изменять частоту возникающих в такой системе автоколебаний. Эксперимент обычно начинают на частоте, при которой фазовый сдвиг между входным и выходным сигналами равен π. Это достигается при нулевой зоне нечувствительности позиционного регулятора и отрицательной обратной связи. Увеличивая зону нечувствительности при отрицательной обратной связи, уменьшают частоту автоколебаний. Увеличивая зону нечувствительности при положительной обратной связи, увеличивают частоту автоколебаний. Результаты экспериментов обрабатываются так же, как и в методе прямоугольной волны. Основным недостатком рассмотренных методов является длительное время эксперимента, затрачиваемое в основном на ожидание установившегося режима колебаний и получения достаточного для аппроксимации частотных характеристик значений их ординат. Для ускорения экспериментов иногда на вход объекта подается сумма гармонических составляющих разных частот. Установившиеся колебания выходной величины также подвергают гармоническому анализу и сразу находят несколько ординат частотной характеристики. Однако в этом случае требуется специальный источник полигармонического воздействия и линейность объекта. Определение аналитического выражения передаточной функции по частотным характеристикам может быть осуществлено несколькими способами. Рассмотрим один из них позволяющий аналитически вычислить выражение для передаточной функции по дискретным ординатам вещественной частотной характеристики. Будем искать выражение для передаточной функции в виде ряда  (19.6) (19.6)Тогда делая подстановку выражение для вещественной частотной характеристики можно записать в виде Если теперь провести гармонический анализ экспериментально полученной вещественной частотной характеристики, то в результате будут получены неизвестные коэффициенты передаточной функции Ак. Ограничиваясь значащими членами ряда (19.8) можно записать выражение передаточной функции объекта в виде (19.6). Ограничение на использование данного метода вычисления передаточной функции относятся к самовыравнивающимся, устойчивым и неминимально-фазовым объектам. В том случае если объект не отвечает этим требованиям, то при вычислении вещественной частотной характеристики необходимо учесть влияние интегрирующих звеньев и звеньев запаздывания на вид этой характеристики и проводить ее расчет с учетом этого влияния. Компенсация запаздывания осуществляется выражением а компенсация интегрирующих звеньев – где U (ω и)V (ω -) экспериментальные вещественная и мнимая частотные характеристики. Основная литература Современные методы идентификации систем. Под ред. П. Эйкгоффа, М.: Мир, 1983 Ордынцев В. М. Математическое описание объектов автоматизации. – М: Машиностроение, 1965. – 360 с. Гроп Д. Методы идентификации систем. – М: Мир, 1979. – 302 с. Дополнительная литература Практикум по автоматике и системам управления производственными процессами: учеб. пособие для вузов /под ред. И.М.Масленникова. -М.: Химия, 1986. -336с. Семенов А. Д., Артамонов Д. В., Брюхачев А. В. Идентификация объектов управления: Учебн. пособие. - Пенза: Изд-во Пенз. гос. ун-та, 2003.- 211 с. Исмаилов С.У. Современные методы идентификации объектов и систем управления. Методические указания к выполнению лабораторных работ для магистрантов спец. 6М0702. Шымкент, ЮКГУ, 2010 г., -78 с. |