Курс лекции по ЭУТТ.. Вахламов. Лекции по дисциплине Энергетические установки транспортной техники для бакалавров высших учебных заведений, обучающихся по специальности
 Скачать 5.99 Mb. Скачать 5.99 Mb.
|

|
Рис. 7.7. Наддув с механическим приводом Рис. 7.8. Турбонаддув: 1 - компрессор; 2 — турбина Применение наддува в двигателях с искровым зажиганием осложняется возникновением детонационного сгорания и более высокой тепловой напряженностью лопаток турбины. Анализируя уравнение 7.1., можно определить и другие способы увеличения мощности двигателя: • увеличение рабочего объема Vhдвигателя является наиболее простым способом повышения мощности. При этом происходит практически пропорциональное изменение массы заряда поступающего в цилиндры, что соответственно влияет на увеличению эффективной мощности. Рабочий объем может быть увеличен как путем увеличена габаритных размеров цилиндров, так и повышением их числа несмотря на то, что увеличение габаритных размеров имеет свои преимущества, этот способ имеет такой существенный недостаток, как пропорциональный рост массы шатунно-поршневой группы, что увеличивает силы инерции деталей и снижает максимальную частоту вращения коленчатого вала;
• использование обедненных горючих смесей приводит к плохой их воспламеняемости от электрического разряда, а применение электрофакельного зажигания существенно усложняет конструкцию двигателя, в частности газораспределительного механизма. Эффективным способом увеличения мощности двигателя является улучшение смесеобразования, особенно в дизелях. Перспективным в этом направлении остаются создание топливной аппаратуры обеспечивающей высокое качество распыления, и интенсификаю турбулизации заряда в цилиндрах двигателя и камере сгорания, дробнее способы смесеобразования описаны в главе 8. Контрольные вопросы 1. Как и почему изменяются основные параметры по нагрузочной характеристике дизеля? 2. Как и почему изменяются основные параметры по нагрузочной характеристике двигателя с искровым зажиганием? 3. Как и почему изменяются основные параметры двигателя по скоростной характеристике? 4. Как и почему изменяются основные параметры двигателя по регулировочной характеристике от состава смеси? 5. Как и почему изменяются основные параметры двигателя по регулировочной характеристике от угла опережения впрыскивания дизеля? 6. Как и почему изменяются основные параметры двигателя по регулировочной характеристике от угла опережения зажигания? 7. Как снимается нагрузочная характеристика? 8. Как снимается регулировочная характеристика двигателя с искровым зажиганием по составу смеси? 9. Как снимается регулировочная характеристика по углу опережения зажигания? 10. Как снимается скоростная характеристика? 11. Для чего необходима внешняя скоростная характеристика? 12. Сформулируйте назначение регуляторной характеристики. 13. Перечислите способы повышения мощности двигателя. 14. Напишите в развернутом виде формулу эффективной мощности. Лекция 8: КИНЕМАТИКА И ДИНАМИКА ШАТУННО-КРИВОШИПНОГО МЕХАНИЗМА ПОРШНЕВОГО ДВИГАТЕЛЯ. 1. Кинематические характеристики движения. 2. Динамика кривошипно-шатунного механизма 3. Влияние конструктивных соотношений кривошипно-шатунного механизма на параметры двигателя 1. Кинематические характеристики движения. В автомобильных двигателях в основном используются следующие типы кривошипно-шатунного механизма (рис. 8.1): центральный (аксиальный), смещенный (дезаксиальный). Комбинируя данные схемы, можно сформировать кривошипно-шатунный механизм (КШМ) как линейного, так и многорядного многоцилиндрового двигателя. При этом смещенный механизм возможен в двух вариантах. В первом случае ось цилиндра смещена относительно оси коленчатого вала, а во втором — ось поршневого пальца смещена относительно оси цилиндра. 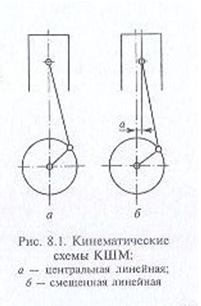 Рис. 8.1 Кинематические схемы КШМ: а – центральная линия; б – смещенная линия При работе двигателя основные элементы КШМ совершают различные виды перемещений. Поршень движется возвратно-поступательно. Шатун совершает сложное плоскопараллельное движение в плоскости его качания. Кривошип коленчатого вала совершает вращательное движение относительно его оси. Расчетная кинематическая схема КШМ представлена на рис. 8.2. Основными геометрическими параметрами, определяющими законы движения элементов центрального КШМ, являются: r — радиус кривошипа коленчатого вала; lш — длина шатуна. Параметр λ = r/lш является критерием кинематического подобия центрального механизма. При этом для КШМ различных размеров, но с одинаковыми λ законы движения аналогичных элементов подобны. В автотракторных ДВС применяют КШМ с λ = 0,24...0,31. В смещенных КШМ имеется еще один геометрический параметр, влияющий на его кинематику, — смещение оси цилиндра (пальца) относительно оси коленчатого вала а. При этом относительное смещение k = а/r является дополнительным к λ критерием кинематического подобия смещенных КШМ. Таким образом, подобные смещенные КШМ имеют одинаковые λ и k, где k изменяется от 0,02 до 0,1. 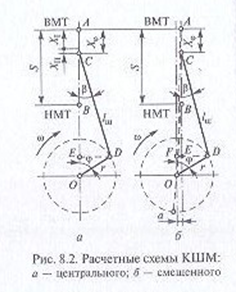 Рис. 8.2 Расчетные схемы КШМ: а – центральная; б – смещенная. При кинематическом анализе КШМ приняты следующие допущения: угловая скорость (частота вращения) коленчатого вала ω постоянна; элементы КШМ абсолютно жесткие; зазоры в подвижных сочленениях КШМ отсутствуют. Кинематику КШМ можно полностью описать, если известны законы изменения во времени следующих параметров: перемещения поршня X. Начало отсчета (X = 0) соответствует положению поршня в ВМТ; положительное направление отсчета принято при его движении от ВМТ к НМТ при вращении кривошипа по ходу часовой стрелки; угла поворота кривошипа φ (начало отсчета — положение кривошипа при нахождении поршня в ВМТ); угла отклонения шатуна β от оси цилиндра (β = 0 при φ = 0). Кинематика кривошипа. Вращательное движение кривошипа коленчатого вала определено, если известны зависимости угла поворота φ, угловой скорости ω и ускорения ε от времени t. Для постоянной частоты вращения коленчатого вала φ = ωt и ω = πn/30. Кинематика поршня. Кинематика возвратно-поступательно движущегося поршня описывается зависимостями его перемещения Хφ, скорости υφ и ускорения jφ в функции угла поворота кривошипа φ. Перемещение поршня при повороте кривошипа на угол φ определяется как сумма его смещений от поворота кривошипа на угол φ(XI) и отклонения шатуна на угол β(ХII): X = r + lш - r cosφ - lш соs β или окончательно с учетом λ = r/lш X = r[(1-соsφ) + (1/λ)(1-соsβ)]. С достаточной для практических расчетов точностью можно упростить эту зависимость: X = r[(1 - соsφ) + (λ/4)(1 - соs2φ)] = ХI+ХII. Скорость поршня определяется как первая производная от перемещения поршня по времени: и приближенно Максимального значения скорость достигает при φ + β = 90°, когда ось шатуна перпендикулярна радиусу кривошипа. Для современных двигателей λ составляет 1,62... 1,64. Ускорение поршня определяется производной от скорости поршня по времени: и приближенно В современных двигателях j = 5000... 20000 м/с2. Для дезаксиального КШМ приближенные значения υ и j имеют вид: С учетом того, что для современных двигателей произведение kλ = 0,01...0,05 и его влияние на кинематику механизма невелико, на практике им обычно пренебрегают. Кинематика шатуна. Сложное плоскопараллельное движение шатуна складывается из движения его верхней головки с кинематическими параметрами поршня и его нижней кривошипной головки с параметрами конца кривошипа. Кроме того, шатун совершает вращательное (колебательное) движение относительно точки сочленения с поршнем. 2. Динамика кривошипно-шатунного механизма При работе двигателя в КШМ действуют следующие основные силовые факторы: силы давления газов, силы инерции движущихся масс механизма, силы трения и момент полезного сопротивления. При динамическом анализе КШМ силами трения обычно пренебрегают. 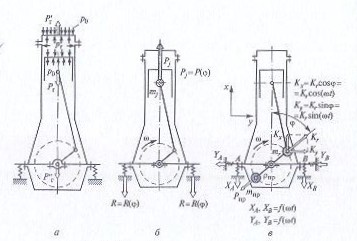 Рис. 8.3. Воздействие на элементы КШМ: а — газовых сил; б — силы инерции Рj; в — центробежной силы инерции Кr Силы давления газов. Сила давления газов возникает в результате реализации в цилиндрах рабочего цикла. Эта сила действует на поршень, и ее значение определяется как произведение перепада давления на его площадь: Рг = (рг - р0)Fп (здесь рг — давление в цилиндре двигателя над поршнем; р0 — давление в картере; Fп — площадь поршня). Для оценки динамической нагруженности элементов КШМ важное значение имеет зависимость силы Рг от времени Сила давления газов, действующая на поршень, нагружает подвижные элементы КШМ, передается на коренные опоры картера и уравновешивается внутри двигателя за счет упругой деформации несущих элементов блок-картера силой Силы инерции движущихся масс. КШМ представляет собой систему с распределенными параметрами, элементы которой движутся неравномерно, что приводит к возникновению инерционных нагрузок. Детальный анализ динамики такой системы принципиально возможен, однако сопряжен с большим объемом вычислений. Поэтому в инженерной практике для анализа динамики двигателя используют модели с сосредоточенными параметрами, созданные на основе метода замещающих масс. При этом для любого момента времени должна выполняться динамическая эквивалентность модели и рассматриваемой реальной системы, что обеспечивается равенством их кинетических энергий. Обычно используют модель из двух масс, связанных между собой абсолютно жестким безынерционным элементом (рис. 8.4). 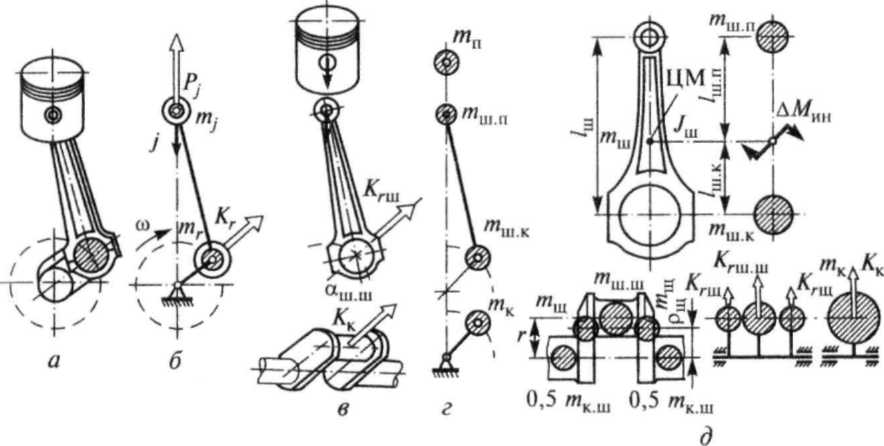 Рис. 8.4. Формирование двухмассовой динамической модели КШМ Первая замещающая масса mj сосредоточена в точке сопряжения поршня с шатуном и совершает возвратно-поступательное движение с кинематическими параметрами поршня, вторая mr располагается в точке сопряжения шатуна с кривошипом и вращается равномерно с угловой скоростью ω. Детали поршневой группы совершают прямолинейное возвратно-поступательное движение вдоль оси цилиндра. Так как центр масс поршневой группы практически совпадает с осью поршневого пальца, то для определения силы инерции Рjп достаточно знать массу поршневой группы mп, которую можно сосредоточить в данной точке, и ускорение центра масс j, которое равно ускорению поршня: Рjп = - mп j. Кривошип коленчатого вала совершает равномерное вращательное движение. Конструктивно он состоит из совокупности двух половин коренной шейки, двух щек и шатунной шейки. При равномерном вращении на каждый из указанных элементов кривошипа действует центробежная сила, пропорциональная его массе и центростремительному ускорению. В эквивалентной модели кривошип заменяют массой mк, отстоящей от оси вращения на расстоянии r. Значение массы mк определяют из условия равенства создаваемой ею центробежной силы сумме центробежных сил масс элементов кривошипа: Kк = Krш.ш + 2Krщ или mкrω2 = mш.шrω2 + 2mщρщω2, откуда получим mк = mш.ш + 2mщρщω2/r. Элементы шатунной группы совершают сложное плоскопараллельное движение. В двухмассовой модели КШМ массу шатунной группы mш разделяют на две замещающие массы: mш.п, сосредоточенную на оси поршневого пальца, и mш.к, отнесенную к оси шатунной шейки коленчатого вала. При этом необходимо выполнить следующие условия: 1) сумма масс, сосредоточенных в замещающих точках модели шатуна, должна быть равна массе замещаемого звена КШМ: mш.п + mш.к = mш 2) положение центра масс элемента реального КШМ и замещающего его в модели должно быть неизменным. Тогда mш.п = mш lш.к/lш и mш.к = mш lш.п/lш. Выполнение этих двух условий обеспечивает статическую эквивалентность замещающей системы реальному КШМ; 3) условие динамической эквивалентности замещающей модели обеспечивается при равенстве суммы моментов инерции масс, расположенных в характерных точках модели. Данное условие для двухмассовых моделей шатунов существующих двигателей обычно не выполняется, в расчетах им пренебрегают из-за его малых численных значений. Окончательно объединив массы всех звеньев КШМ в замещающих точках динамической модели КШМ, получим: массу, сосредоточенную на оси пальца и совершающую возвратно-поступательное движение вдоль оси цилиндра, mj = mп + mш.п; массу, расположенную на оси шатунной шейки и совершающую вращательное движение вокруг оси коленчатого вала, mr = mк + mш.к. Для V-образных ДВС с двумя шатунами, расположенными на одной шатунной шейке коленчатого вала, mr = mк + 2mш.к. В соответствии с принятой моделью КШМ первая замещающая масса mj, движущаяся неравномерно с кинематическими параметрами поршня, вызывает силу инерции Рj = - mj j, а вторая масса mr, вращающаяся равномерно с угловой скоростью кривошипа, создает центробежную силу инерции Кr= Кrш + Кк = - mrrω2. Сила инерции Рj уравновешивается реакциями опор, на которые установлен двигатель. Будучи переменной по значению и направлению, она, если не предусмотреть специальных мероприятий, может быть причиной внешней неуравновешенности двигателя (см. рис. 8.3, б). При анализе динамики и особенно уравновешенности двигателя с учетом полученной ранее зависимости ускорения у от угла поворота кривошипа φ силу Рj представляют в виде суммы сил инерции первого (РjI ) и второго (РjII) порядка: где С = - mjrω2. Центробежная сила инерции Кr= - mrrω2 от вращающихся масс КШМ представляет собой постоянный по величине вектор, направленный по радиусу кривошипа и вращающийся с постоянной угловой скоростью ω. Сила Кr передается на опоры двигателя, вызывая переменные по величине реакции (см. рис. 8.3, в). Таким образом, сила Кr, как и сила Рj, может являться причиной внешней неуравновешенности ДВС. Суммарные силы и моменты, действующие в механизме. Силы Рг и Рj, имеющие общую точку приложения к системе и единую линию действия, при динамическом анализе КШМ заменяют суммарной силой, являющейся алгебраической суммой: РΣ = Рг + Рj (рис. 8.5, а). 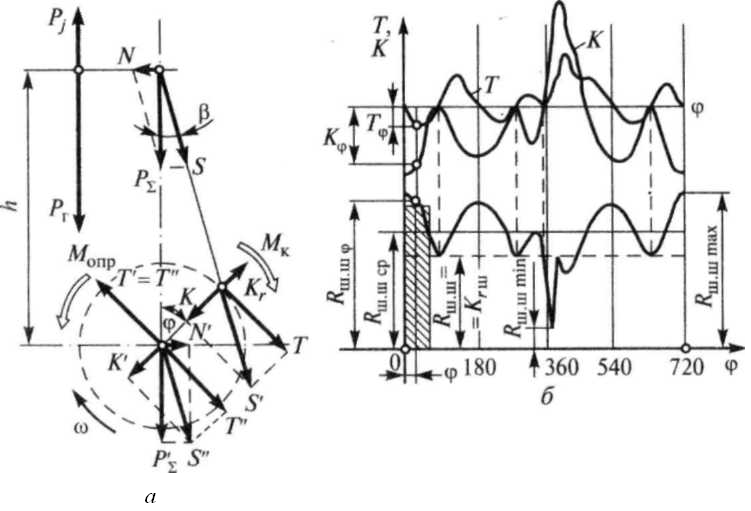 |