«Електромеханічне обладнання механізму повороту платформи ЕКГ-8І в умовах ПрАТ «ІнГЗК». дп. Реферат 6 Вступ Розділ Характеристики електромеханічного обладнання екскаватору екг8І 7
 Скачать 2.2 Mb. Скачать 2.2 Mb.
|

3.4 Математичне моделювання двохдвигунного | ||||||||||||
 |  |
| а) запуск | б) збільшення навантаження |
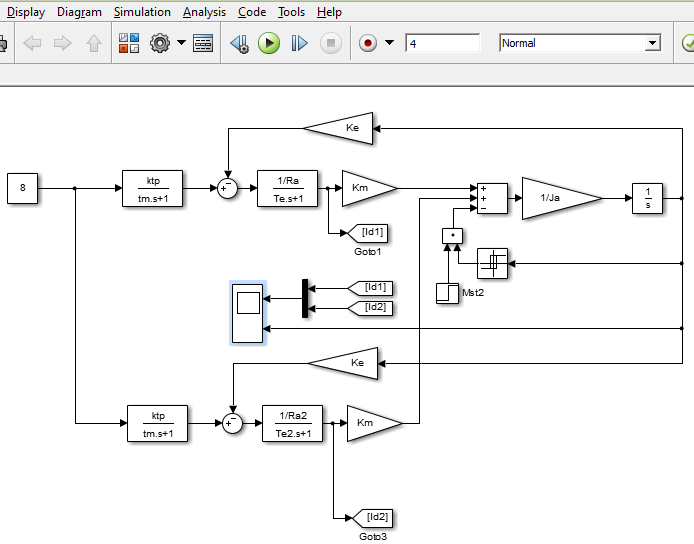
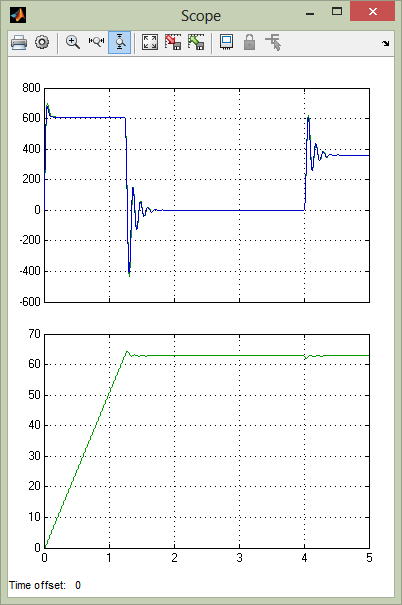
| Рисунок 3.4.2 – Перехідні та усталені режими двохдвигунного електроприводу повороту екскаватора ЕКГ-8И | |
Графіки рис.3.4.2. наочно демонструють цю нерівномірність розподілу струмових та механічних навантажень. А різниця між усталеними значеннями струмів окремих двигунів складає 11.8%. Для вирівнювання навантажень електродвигунів слід використовувати замкнені системи керування електроприводом повороту.
3.4.2 Математичне моделювання двохдвигунного електроприводу повороту екскаватора ЕКГ-8И у замкненій системі керування
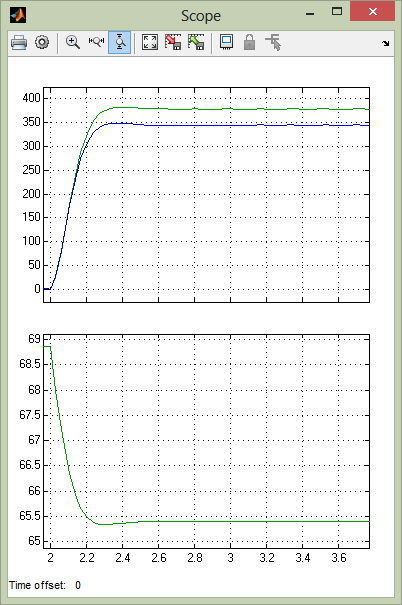
Для уникнення таких ситуацій та вирівнювання струмових навантажень окремих електродвигунів було застосовано схему з індивідуальним живленням якірних кіл окремих двигунів. Структурна схема замкненої системи керування двохдвигунного приводу повороту екскаватора зображено на рис.3.4.3.
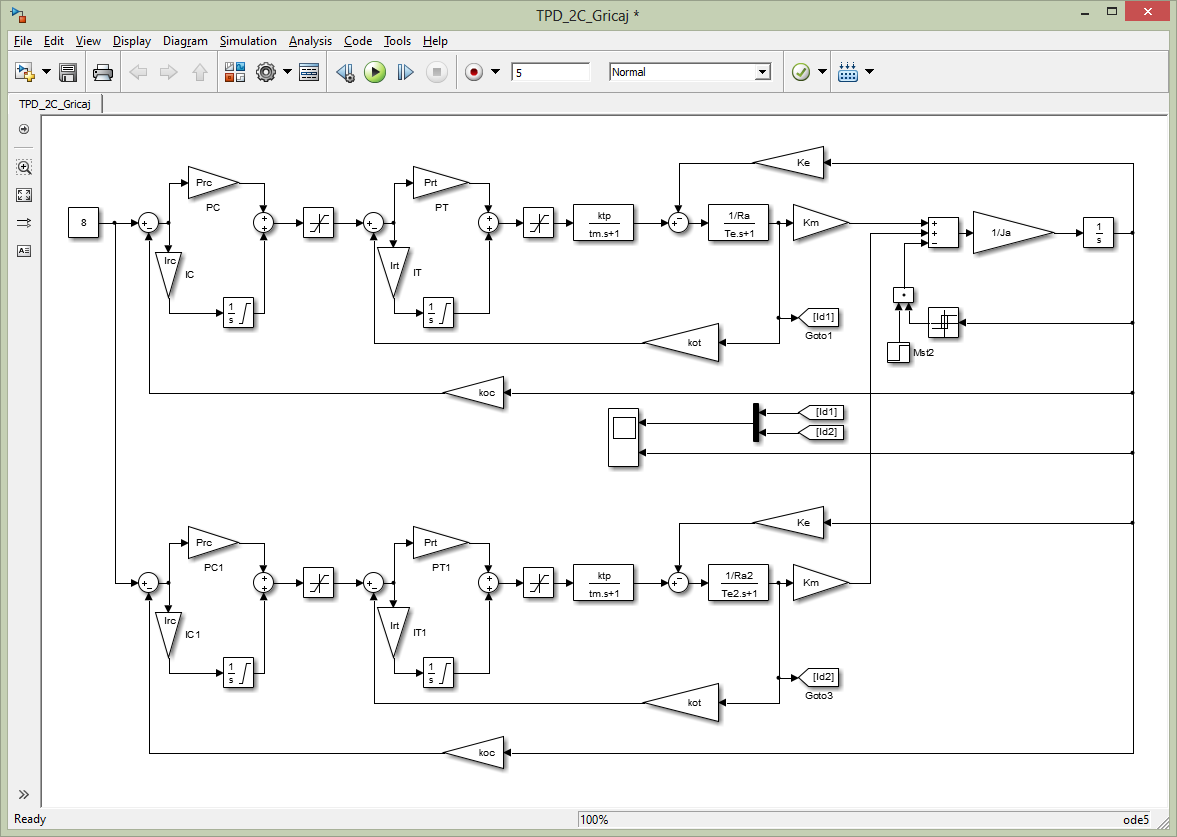
Рис. 3.4.3 – Структурна схема замкненої системи керування двохдвигунного електроприводу повороту екскаватора ЕКГ-8І
У такій моделі налаштування регуляторів системи автоматичного керування окремих електродвигунів співпадає. Якірні опори цих двигунів декілька відрізняються так, як це було прийнято в розд.3.5.1.
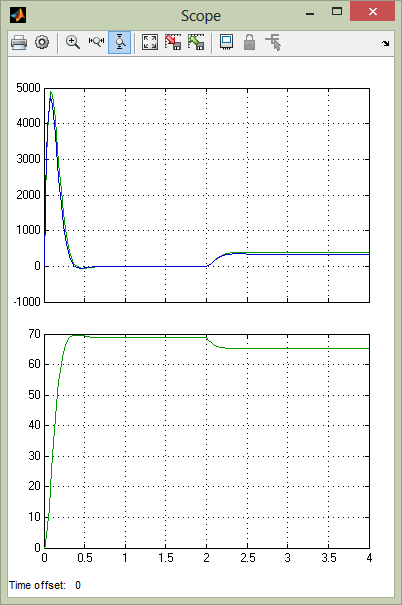
Отримані графіки процесів запуску приводу та збільшення навантаження приведено на рис.3.4.4. Як ви бачите з рис.3.4.4, використання такої звичайної двохконтурної системи підпорядкованого керування забезпечує нам досить точне вирівнювання струмових та механічних навантажень окремих двигунів у двохдвигунному електроприводі. Але при цьому також погіршуються динамічні характеристики електроприводу і збільшується коливальність перехідних процесів та час регулювання зрівнюючи з теоретичними параметрами системи, оптимізованої за симетричним оптимумом.
 | 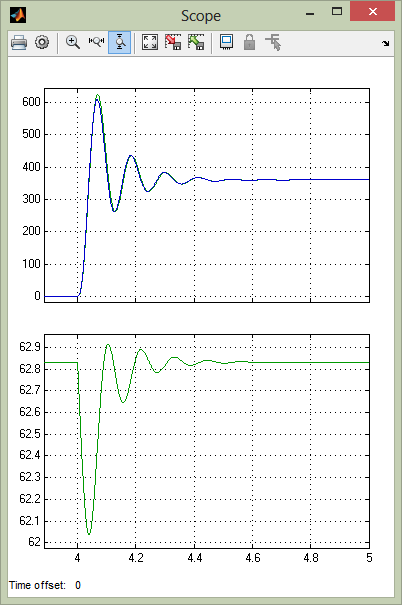 |
| а) запуск електроприводу | б) збільшення навантаження |
| Рисунок 3.4.4 – Перехідні та усталені режими двохдвигунного електроприводу повороту екскаватора ЕКГ-8И у замкненій системі керування | |
3.5 Інженерні методики налаштування ПІД-регулятора
За інших рівних умов пропорційно-інтегрально-диференціальні або ПІД (PID - Proportional-Integral-Derivative) регулятори дозволяють підняти точність управління в 5-100 разів у порівнянні з позиційним регулятором.
В задачах автоматизованої системи управління застосовують ПІД та двопозиційне регулювання. Останнє, у свою чергу, включає або відключає виконавчий пристрій, якщо виміряний параметр не відповідає заданому. Воно призводить до коливання коливання технологічного параметра, яке не залежить від самого регулятора та визначається параметрами системи.
Сигнал управління ПІД регулятора забезпечує стан виконавчого пристрою, коли при розрахунку різниці між заданим і виміряним значенням, між швидкістю зміни параметрів та інтегралу відхилення заданої від виміряної величини, остання дорівнює заданій. Цей стан стабілізується і точність підтримки параметра зростає у пару, а то й десятки разів.
Сигнал управління для такого регулятора – це сума трьох компонентів:

 - постійна часу інтегрування;
- постійна часу інтегрування; - постійна часу диференціювання;
- постійна часу диференціювання; - відносний діапазон;
- відносний діапазон;Сигнал управління, який виробляє регулятор, визначається тим, наскільки велике неузгодженість (пропорційна компонента), наскільки довго зберігається неузгодженість (інтегральна компонента) і, нарешті, як швидко змінюється неузгодженість (диференціальна компонента).
Добре обрані параметри ПІД регулятора, які підходять властивостям системи, та точність його налаштування, прямо впливають на якість управління. Далі розглянуто методики налаштувань ПІД регуляторів.
Налаштування на основі аналізу перехідної характеристики
На першому етапі налаштування ПІД регулятора налаштовується його пропорційна компонента. Перед цим встановимо максимальну постійну інтегрування та мінімальну постійну диференціювання. Таким чином ми їх відключаємо. Далі встановлюємо необхідно уставку та мінімальну зону пропорційності. Тепер цей регулятор двопозиційний. Його перехідна характеристика:
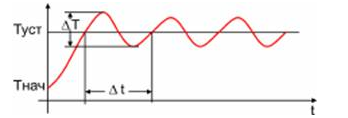
Рис. 3.1
де – Tнач – початкова температура в системі, Tуст – задана температура (уставка);
ΔT – розмах коливань температури; Δt -період коливань температури
Далі, зону пропорційності задаємо рівною розмаху коливань температури. Це буде першим значенням, яке є наближенням для зони пропорційності. Після аналізу перехідної характеристики, коригуємо значення зони пропорційності. На наступному рисунку 3.2 показані можливі варіанти перехідних характеристик.
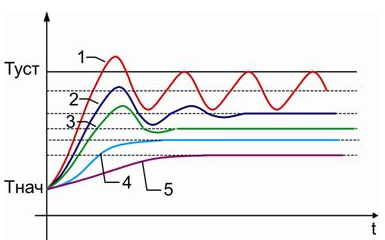
Рис. 3.2
Перехідна характеристика першого типу:
Зону пропорційності слід значно збільшити, адже вона, як і налаштування регулятора, далека від оптимальних значень.
Перехідна характеристика другого типу:
Тут спостерігаються коливання, затухання яких складає 5-6 періодів. При використанні диференційного компоненту ПІД регулятора, значення зони пропорційності є оптимальним. Якщо ж не буде використовуватися, то необхідні значення зони пропорційності збільшувати до значень, як у перехідних характеристиках типу 3 або 4.
Перехідна характеристика третього типу.
Видно невеликий викид та коливання, які швидко затухають (1-2 періоди). Такою характеристикою забезпечена гарна швидкодія та вихід на задану температуру. Він є оптимальним, якщо в системі допускаються перегріви при переході температур. Їх можна позбутися шляхом збільшення значення зони пропорційності до значення характеристики типу 4.
Перехідна характеристика четвертого типу.
Температура набуває сталого значення без різких викидів та коливань. Так, швидкодія трохи менша, але цей тип також можна вважати оптимальним.
Перехідна характеристика п’ятого типу.
Точність, як статична, так і динамічна мала. Підхід до сталого значення задовільнений. Все це говорить про те, що значення зони пропорційності завелике. Проте, є ще деякі нюанси, на які слід звернути увагу: у жодної з характеристик вище стале значення температури не сходиться із заданим значенням; тривалість перехідних процесів залежить від зони пропорційності (чим більше значення зони пропорційності, тим більше тривалість пп). Також, інтегральною компонентою чисто пропорційного регулятора забирається залишкова неузгодженість.
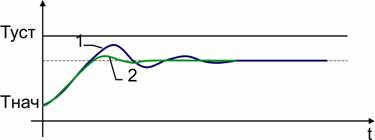
Рис. 3.3
Другий етап, а саме встановлення диференціальної компоненти (td), присутній тільки у випадку, якщо використовується ПІД регулятор з усіма функціями. Якщо використовується пропорційно-інтегральний регулятор, то другий етап пропускається і починається третій етап – налаштування інтегральної компоненти.
Коли налаштовується зона пропорційності, необхідно зауважити, що її задане значення відповідає встановленому, і в ньому присутні коливання, що затухають (рисунок 2, крива 2, рисунок 3, крива 1). Значення постійної часу диференціювання задається так, щоб відтворилася друга крива перехідної характеристики на третьому рисунку. Перше наближення в даному випадку – рівна постійна часу диференціювання.
Затухаючі коливання усуває диференціальна компонента, і робить перехідну характеристику схожу на криву 3 (рисунок 2). При цьому зона пропорційності менша, ніж у третьому типі. Отже, при наявності диференціальної компоненти статична та динамічна точність регулювання вище, ніж просто П-регулятора.
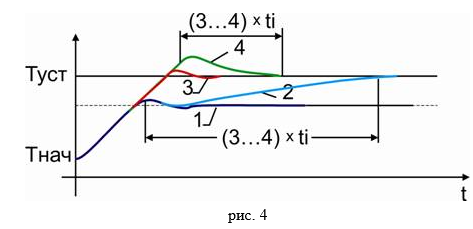
Третій етап – налаштування інтегральної компоненти ПІД-регулятора. Він відбувається після налаштування однієї, або двох компонент (пропорційної та диференційної). Після цього отримується перехідна характеристика, вказана на рисунку 4, крива 1. Залишкову неузгодженість між сталою температурою та вказаною прибирає інтегральна компонента. Тому, інтегрування починається, зазвичай, з рівної їй величини.
Перехідна характеристика другого типу.
Вихід на задану величину досить тривалий та величина постійного часу інтегрування досить велика.
Перехідна характеристика четвертого типу.
Постійна часу інтегрування невелика (при зменшені виникають коливання) та тривалий вихід на задану величину,
І, виходить, що перехідна характеристика саме третього типу є оптимальною.
Метод Зіглера-Нікольса
Одразу слід зауважити, що цей метад не є самим оптимальним, і спрацьовує він не завжди. Проте, він простий та підходить для базової установки регуляторів у майже, всі системи.
1. Коефіцієнти, Kp, Ki, Kd = 0, при цьому як відносний діапазон Pb, так і постійні часу ti та td – максимальні;
2. При поступовому збільшенні, або зменшенні значення Kp намагаємося отримати стійкі коливання з-за перерегулювання. Далі, змінюємо значення Kp, поки коливання не перестане загасати (стабілізується).
3. Поточне значення Kp запам’ятовуємо (Ku) та міряємо період коливань системи tu.
4. Згідно отриманих значень Ku і tu розраховуємо параметри пропорційно-інтегрально-диференційного регулятора:
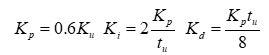
5. Враховуємо період дискретизації для дискретних регуляторів - T (домножити на Ki, розділити Kd на T).
Пряме і зворотне дію регуляторів
Більшість регуляторів «прямої дії». Тобто, збільшення сигналу управління призводить до збільшення змінної процесу. Наприклад, це випадок в насосній системі, де тиск це змінна процесу; збільшення швидкості мотора призводить до збільшення тиску.
Але в деяких системах збільшення сигналу управління призводить до зменшення змінної процесу. Наприклад, температура рідини обдуваемого вентилятором теплообмінника - змінна процесу; при збільшенні швидкості вентилятора температура рідини зменшується! В даному випадку, необхідно використовувати регулятор «зворотної дії».