конспект теормех. теоретическая механика
 Скачать 3.7 Mb. Скачать 3.7 Mb.
|

|
ЧАСТНЫЕ СЛУЧАИ ДВИЖЕНИЯ ТОЧКИ Равномерное движение. Это движение, при котором скорость точки постоянна по величине, V=const. Траектория точки при этом может быть криволинейной. Касательное ускорение Прямолинейное движение (не обязательно равномерное). Для прямолинейной траектории радиус кривизны Равномерное движение – движение с постоянным по величине и знаку касательным ускорением, ПРОСТЕЙШИЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА Существует пять видов движения твердого тела: поступательное движение; вращение вокруг неподвижной оси; плоское движение; вращение вокруг неподвижной точки; свободное движение. Первые два называются простейшими движениями твердого тела. ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА И ЕГО СВОЙСТВА. Поступательное движение – движение, при котором любая прямая, проведенная в нем, остается параллельна самой себе. Примеры: движение кузова автомобиля на прямолинейной дороге (в этом случае траектории всех точек кузова – это параллельные прямые); круговое поступательное движение: П  Рис.1.28 римером поступательного движения может служить движение спарника (рис.) – стержня шарнирно закрепленного на двух кривошипах. Если длины кривошипов равны О1А=О2В, то спарник АВ совершает поступательное круговое движение, т.е. все его точки движутся по окружностям одинаковых радиусов, но со сдвинутыми центрами. Вообще траекториями точек тела при поступательном движении могут быть любые кривые. Теорема: при поступательном движении тела траектории всех его точек равны, т.е. при наложении совпадают, а скорости и ускорения векторно равны: 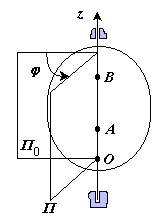 Рис.1.29 , Из теоремы видно, что все точки тела при поступательном движении движутся одинаково. Таким образом, при поступательном движении можно говорить о скорости, ускорении и траектории такого движения, приписывая их к любой точки тела. ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ. УГЛОВАЯ СКОРОСТЬ И УГЛОВОЕ УСКОРЕНИЕ. При таком вращении точки тела, лежащие на оси, остаются неподвижными, а любая точка М, отстающая от оси на расстоянии ОМ=h, будет совершать движение по окружности радиуса h с центром на оси. Плоскости таких окружностей перпендикулярны оси. Для того, чтобы задать вращательное движение достаточно для любой точки М тела, не лежащей на оси задать угол Угловая скорость определяет изменение угла φ во времени. Угловая скорость определяется формулой: Таким образом, мгновенная угловая скорость – есть производная угловой координаты по времени ([]=рад/с=с-1). В технике часто для измерения угловых скоростей многооборотных вращений (турбин, валов и т.д.) применяют внесистемную единицу измерения угловых скоростей [n]=об/мин Угловое ускорение характеризует изменение угловой скорости во времени: Таким образом, угловое ускорение в данный момент есть производная от угловой скорости по времени. Учитывая определение , получим В кинематике часто используют векторные представления угловой скорости и углового ускорения, т.е. считают, что У  Рис.1.30 гловые скорость и ускорение характеристики вращательного движения твердого тела как целого. В тоже время каждая его точка в отдельности обладает линейными скоростью и ускорением. Поскольку траектория точки М во вращательном движении известно - это дуга окружности радиуса ОМ=h, для то определения скорости и ускорений удобно использовать естественная способ задания движения, принимая в качестве криволинейной координаты длину дуги окружности ММ Таким образом, величина скорости во вращательном движении есть произведение расстояния h на угловую скорость тела. Вектор Касательное ускорение по величине будет: Касательное ускорение равно произведению расстояния h на угловое ускорение тела. В первом случае вектор Таким образом, нормальное ускорение по величине не есть произведение расстояния h на квадрат угловой скорости. Полное ускорение: Таким образом, что, зная Замечание: поскольку Все векторы ускорений точек на радиусе OM параллельны Частные случаи вращательного движения. 1) Равномерное вращение – вращение с постоянной угловой скоростью. При равномерном вращении угол поворота 2)Равнопеременное вращение – вращение с постоянным угловым ускорением. Так же как и в случае равнопеременного движения точки здесь выделяют равноускоренное вращение (E>0) и равнозамедленное (E<0) Пример: Дано: Найти: Решение: Случай равноускоренного вращения. ФОРМУЛЫ РИВАЛЬСА (ВЕКТОРНЫЕ ФОРМУЛЫ СКОРОСТИ И УСКОРЕНИЯ ТОЧЕК ВРАЩАЮЩЕГОСЯ ТЕЛА). Будем определять вектор По определению векторного приведения величина его здесь будет 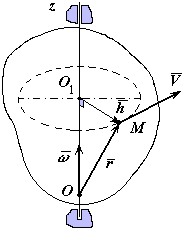 Рис.1.31 , В результате приходим к равенству: Можно доказать, что первое векторное произведение здесь представляет касательное ускорение точки, а второе нормальное ускорение. СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ Сложное или составное движение – это движение точки по отношению к двум системам отсчета, одна из них, связанная с неподвижным толом “B” называется абсолютной, а другая – подвижная система “A” движется относительно неподвижной “B”. Точка М перемещается внутри или по поверхности тела А, которое еще называется переносной средой (поскольку оно не всегда обязательно твердое). В свою очередь тело А перемещается относительно условно неподвижного тела В. Пример: движение куска руды относительно конвейера, который перемещается вдоль выработки. Движение точки М относительно подвижного тела А называется относительным, траектория, скорость Движение точки М вместе с телом А относительно неподвижного тела В, называется переносным движением. Точнее, переносное это движение той точки переносной среды А, относительно неподвижного тела В с которым в данный момент совпадает точка М. Траектория, скорость Движение точки М по отношению к неподвижному телу В или к неподвижной системе отсчета называется абсолютным движением. Именно абсолютное движение видит наблюдатель связанный неподвижным телом В. Траектория, скорость Пример: движение ползуна вдоль вращающегося кривошипа.  Рис.1.32 Движение ползуна вдоль кривошипа относительное. Фрагментами относительных траекторий будут фрагменты кривых вдоль кривошипа до соответствующих положений ползуна. Переносным движением будет вращательное движение точки К кривошипа, через которые в данный момент проходит ползун. Поэтому фрагментами переносных траекторий будут фрагменты окружностей соответствующего радиуса. Составным или абсолютным движением будет движение ползуна относительно неподвижного основания, его траекторию получим, соединяя различные положения ползуна Р. В данном случае абсолютная траектория это некоторая разворачивающаяся спираль. |