В. Г. Шуваев Замкнутые системы управления электроприводом
 Скачать 1.57 Mb. Скачать 1.57 Mb.
|

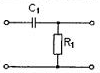
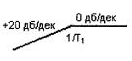
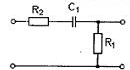
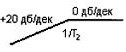
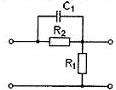
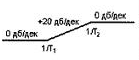
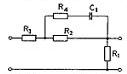
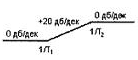
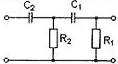
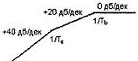
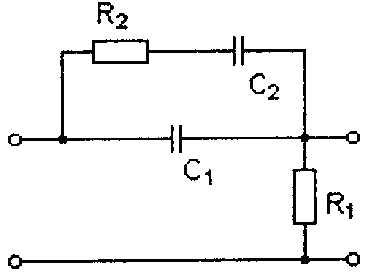
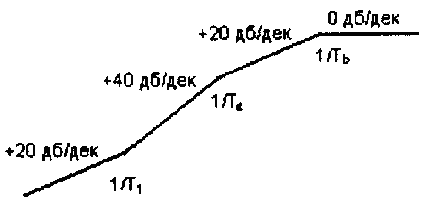
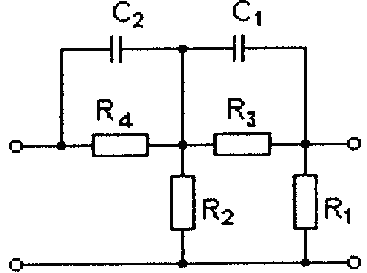
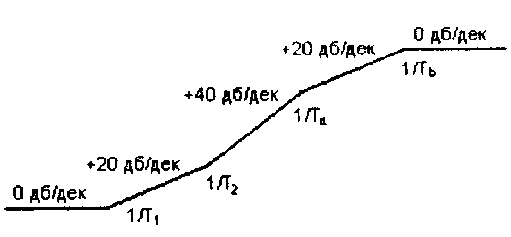
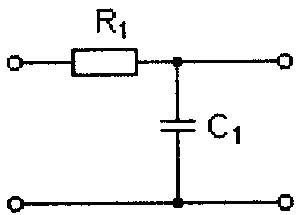
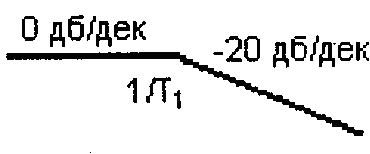
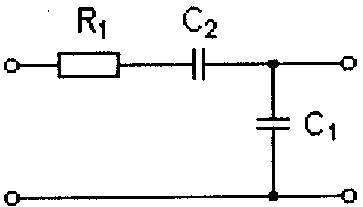
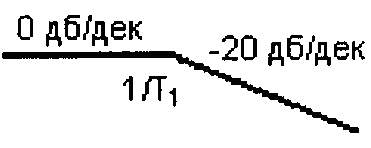
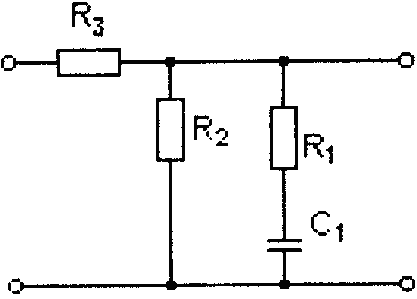
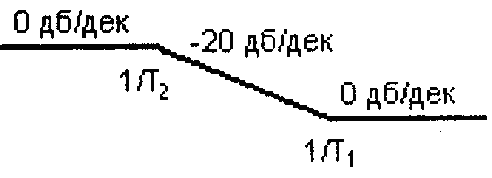
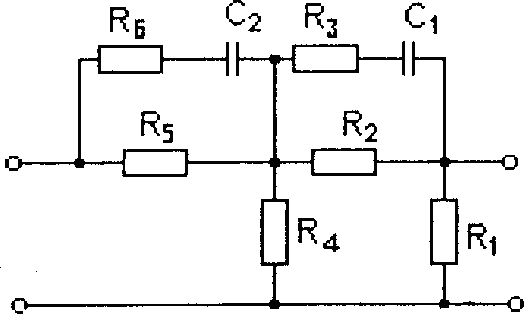
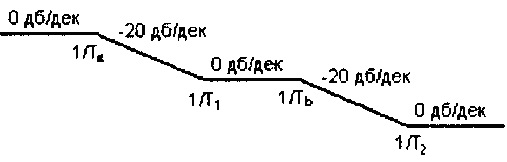
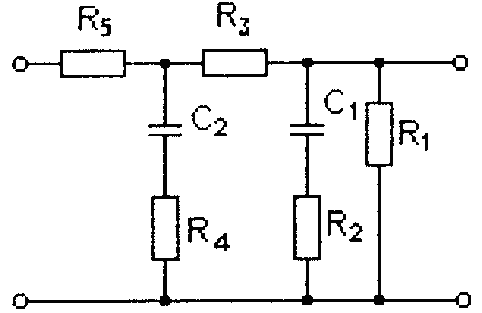
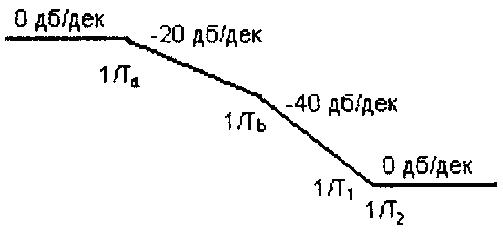
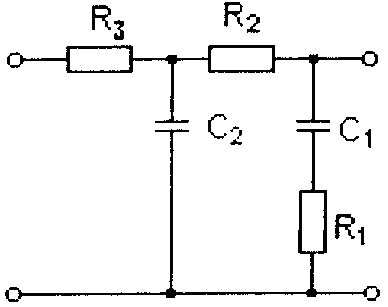
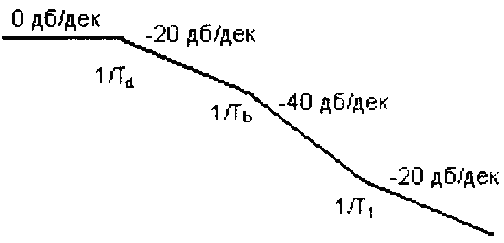
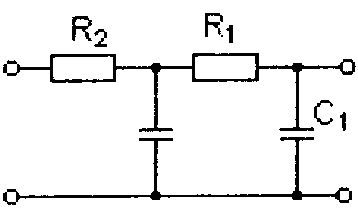
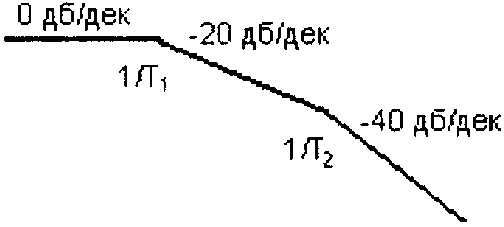
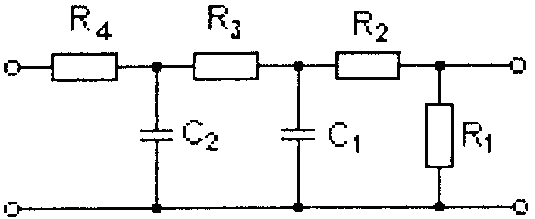
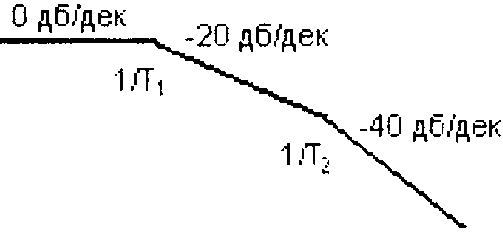
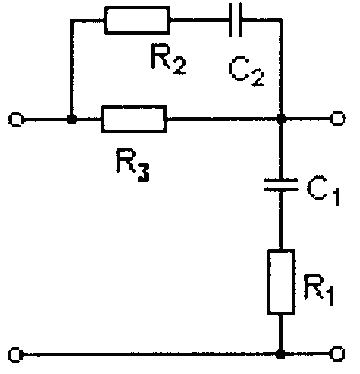
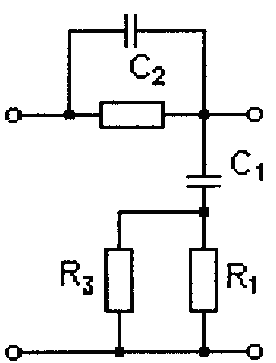
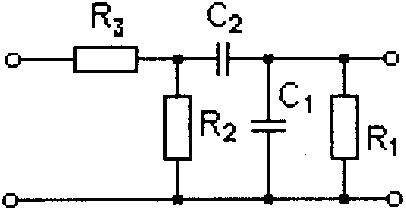
Приложение 6Таблица П 6 Таблица пассивных корректирующих элементов
Продолжение таблицы П 6
Продолжение таблицы П 6
Окончание таблицы П 6
* Рассчитывается сопротивление якорной цепи исключительно двигателя, но не элементов системы «преобразователь-двигатель». 1٭ См. 3.2.2. «Составление передаточной функции тиристорного преобразователя»;(3.9); 3.2.3. «Составление передаточной функции цепи ОС по скорости». |