В. Г. Шуваев Замкнутые системы управления электроприводом
 Скачать 1.57 Mb. Скачать 1.57 Mb.
|

|
ВВЕДЕНИЕ Для приведения в движение большинства рабочих машин необходима механическая энергия. Источником механической энергии чаще всего является электропривод, осуществляющий преобразование электрической энергии в механическую [1,3,4]. Современный электропривод определяет собой уровень энерговооруженности труда и, благодаря своим преимуществам по сравнению со всеми другими видами приводов, является основным и главным средством автоматизации рабочих машин и производственных процессов. Электропривод (ЭП) это – электромеханическая система, состоящая из электромеханического преобразователя (ЭМП), преобразователя электрической энергии (ПЭ), преобразователя механической энергии (ПМ), информационных преобразователей (ИП) и управляющего устройства (УУ), предназначенная для приведения в движение исполнительных органов рабочей машины (ИО РМ) и управления этим движением [1]. В отдельных случаях в этой системе могут отсутствовать ПЭ и ПМ преобразователи. Структура электропривода приведена на рис.1.1. 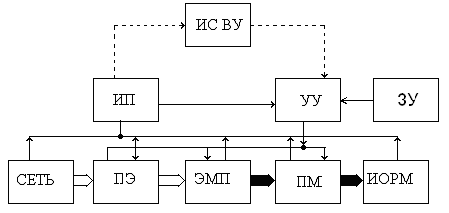 Рис.1.1. Структура электропривода Преобразователь электрической энергии (ПЭ) преобразует род тока, напряжение, частоту и изменяет показатели качества электрической энергии он предназначен для создания управляющего воздействия на ЭМП. Электромеханический преобразователь (ЭМП) является основной частью ЭП, он предназначен для преобразования электрической энергии в механическую, чаще всего это электродвигатель. Преобразователь механической энергии (ПМ) предназначен для передачи механической энергии от электродвигательного устройства электропривода к (ИОРМ) и согласования вида и скоростей их движения. Управляющее устройство (УУ) на основе информации получаемой по каналам связи от ИП и задающего устройства (ЗУ) управляет ПЭ, ЭМП, ПМ. Параметрами электропривода являются: скорость, угол поворота выходного вала, ток двигателя, момент на валу, диапазон регулирования, жесткость механической характеристики, электромеханическая и электромагнитная постоянные времени. Наибольший интерес представляют регулируемые ЭП, которые позволяют в широком диапазоне скоростей управлять ИО РМ при высоком качестве статических и динамических характеристик привода. Для управления электродвигателем в них применяются, чаще всего, управляемые тиристорные и транзисторные преобразователи. Использование различных обратных связей (ОС) позволяет сформировать необходимые статические и динамические характеристики и обеспечить защиту ЭП от перегрузок. Настоящее учебное пособие потребуется студентам специальности 220301 «Автоматизация технологических процессов и производств» при выполнении как курсового, так и дипломного проекта по дисциплине «Автоматизированный электропривод». В нём рассматриваются основные вопросы построения замкнутой системы управления ЭП постоянного тока, даны рекомендации по выбору элементов системы управления и ОС, построению статических и динамических характеристик ЭП, настройке на заданные параметры работы. Все необходимые справочные материалы приведены в приложениях составленных на основе справочной литературы и каталожных данных на использованное оборудование. Дополнительные сведения, которые могут понадобиться для выполнения курсового проекта, можно найти в рекомендованной литературе. Задание на курсовое проектирование Курсовой проект имеет целью закрепление теоретических знаний по курсу «Автоматизированный электропривод» и развитие навыков расчета замкнутых систем электропривода. В курсовом проекте следует выполнить расчеты, связанные с применением комплектного регулируемого ЭП, в состав которого входят: приводной электродвигатель, регулируемый силовой преобразователь с аппаратурой управления, а также элементы цепей обратных связей. Необходимо уметь правильно выбрать элементы ЭП (электродвигатель , тахогенератор, управляемый выпрямитель, согласующий трансформатор, уравнительные реакторы) и определить соответствие его статических и динамических свойств заданным техническим требованиям. Курсовой проект должен содержать пояснительную записку и чертежи упрощенной принципиальной схемы ЭП и расчетных структурных схем системы управления ЭП. Пояснительная записка выполняется на листах формата А4 и содержит расчетную часть курсового проекта с кратким описанием проделанной работы. Чертежи схем выполняются на листах стандартного формата в соответствии с ГОСТ. Режим работы ЭП стабилизация скорости. Требования к ЭП приведены в табл. 1.1. Данные механизма приведены в табл. 1.2–1.4, требования к редуктору в табл. 1.5. Таблица 1.1 Требования к электроприводу
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||