Вопросы к экзамену. 537354_Вопросы к экзамену. Вопросы второго уровня вопрос 3. Изобразите развернутую структурнофункциональную схему машиныавтомата (на примере промышленного робота)
 Скачать 3.55 Mb. Скачать 3.55 Mb.
|

Вопрос №63. Изобразите структурную кинематическую схему промышленного робота, работающего в цилиндрической системе координат.Системы координат бывают двух видов: прямоугольные и криволинейные. Цилиндическая систма координат является разновидностью кривоинейной систем координат Цилиндрическая система координат, характеризуется перемещением объекта в основной координатной плоскости в направлениях r и φ, а также по нормали к ней z; Для промышленного робота манипулятора представлена:  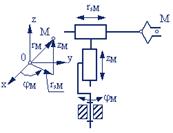 Вопрос;64. Покажите условное изображение трехходового двухпозиционного пневматического распределителя с "пилотным" управлением, пружинным доминированием и ручным дублированием, поясните принцип действия такого распределителя. Управление сложными объектами с пневматическими приводами базируется преимущественно на электрических и электронных системах, имеющих широкие возможности сбора, обработки информационных и формирования управляющих электрических сигналов, и высокое быстродействие. Независимо от элементной базы управляющих систем (релейно-контактная или микропроцессорная техника), в силовой части привода применяют пневматические распределители с электромагнитным управлением. Работа подобных пневмораспределителей основывается на свойстве находящихся под напряжением электромагнитных катушек втягивать расположенный в них якорь. Запорно-регулирующий элемент в таких аппаратах располагают непосредственно на торцах якоря, который помещается в гильзу, ввинченную в корпус. Снаружи гильза охватывается приводной электромагнитной катушкой (рис. 19). Пилотное управление распределителей - это двухкаскадное усиление мощности сигнала (1-й каскад «электрический - пневматический управляющий», 2-й каскад «пневматический управляющий - пневматический силовой»). Для работы пилотного управления на распределитель нужно подавать некоторое минимальное давление (давление управления), которое должно быть достаточным для перемещения затвора против силы действия пружины. В распределителе с пилотным управлением не зависимо от диаметра условного прохода (например, для больших рабочих расходов) для Рис. 19 3/2-пневмораспределитель с электромагнитным управлением и ручным дублированием 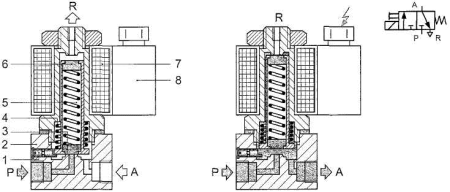 Если электромагнитная катушка 7 обесточена, якорь 5 прижат пружиной 4 к седлу клапана 3, перекрывая канал Р, по которому подводится сжатый воздух; выходной канал А соединен с атмосферой через пазы на наружной поверхности якоря. Напряжение на катушку 7 подается через присоединительный элемент — коннектор 8, при этом якорь 5, преодолевая усилие пружины 4, поднимается до седла клапана 6, закрывая канал R выхода воздуха в атмосферу и открывая канал, соединенный с отверстием для подведения сжатого воздуха. Сжатый воздух подается в линию потребителя (канал А). Пневмораспределители с электромагнитным приводом имеют, как правило, ручное дублирование, используемое обычно при пусконаладочных работах или при поиске отказа (если распределитель срабатывает от элемента ручного управления, это свидетельствует о том, что не работает катушка). Включают пневмораспределитель нажатием или проворотом специального устройства (рис, 19, поз.1) механически поднимающего якорь с седла клапана. После проверки работоспособности распределителя элемент ручного управления необходимо выставить в положение не препятствующее свободному перемещению якоря. Вопрос №65. Изобразите принципиальную пневматическую схему привода пневматического цилиндра одностороннего действия с 3/2 распределителем.Для управления цилиндром одностороннего действия применена схема прямого управления, где используется 3/2 распределитель 1Y с односторонним электромагнитным управлением и пружинным возвратом электрокнопка S1 (рисунок 3.1). Когда кнопка нажата, ток течет по обмотке 1Y1 электромагнита 3/2 распределителя. Электромагнит срабатывает, распределитель переключается в открытую позицию, и воздух поступает в полость цилиндра, а шток при этом выдвигается. Отпускание кнопки приводит к разрыву цепи. Напряжение на обмотке электромагнита пропадает, распределитель пружиной возвращается в исходную позицию, шток цилиндра под воздействием пружины втягивается. Не прямое управление цилиндром 1А представлено на рисунке 3.2. Если кнопка нажата, ток течет по обмотке реле. Контакт К1 реле замыкается, и распределитель 1Y переключается в другое положение. Шток цилиндра выдвигается. Если кнопку отпустить, ток перестанет течь по обмотке реле. Реле выключится, и распределитель 1Y вернется в исходное положение. Шток цилиндра 1А втянется. 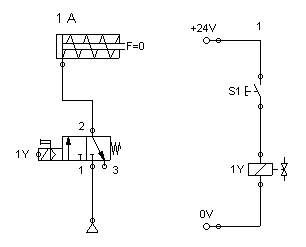 Рисунок 3.1 - Принципиальные схемы пневматическая, электрическая для прямого управления цилиндром одностороннего действия 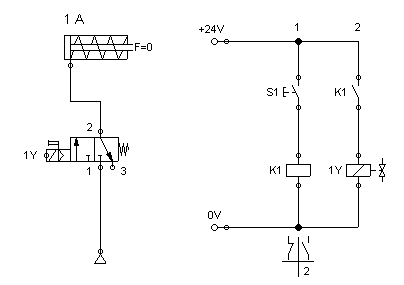 Рисунок 3.2 - Принципиальные схемы: пневматическая, электрическая для непрямого управления цилиндром одностороннего действия |