СУЛА. Закон регулирования на работу системы стабилизации (движение крена). В реальных системах переключение рулей отстает на время
 Скачать 1.09 Mb. Скачать 1.09 Mb.
|

Автономные системы наведения.Автономная система управления представляет собой комплекс приборов, которые обеспечивают движение ракеты по заранее заданной (программной) траектории без использования какой-либо энергии, идущей от цели или с командного пункта. Эти приборы позволяют не только удерживать центр тяжести ракеты на программной траектории, но и стабилизировать положение ракеты в полете относительно продольной, поперечной и вертикальной осей. Программа полета такой ракеты рассчитывается заранее и включает в себя следующие параметры: курс, направление оси ракеты относительно горизонта, скорость, высоту, дальность полета и некоторые другие. Эти параметры задаются автономной системе управления перед стартом. После старта ракеты автономная система не позволяет вводить какие-либо изменения в программу полета. В полете автономная система управления непрерывно измеряет отклонение ракеты от траектории, заданной программным устройством, и корректирует направление полета, чтобы как можно точнее вывести ракету в район цели. Аппаратура для автономного наведения может представлять собой весьма сложную динамическую систему, состоящую из большого числа разнообразных по принципу действия приборов. В некоторых случаях контроль координат центра масс летательного аппарата может быть заменен контролем его угловых координат. Тогда для измерения фактических значений угловых координат используются гироскопические приборы, например, свободные гироскопы, а требуемые значения угловых координат задаются программным механизмом. Достоинством автономных систем управления считается то, что они конструктивно, как правило, проще систем телеуправления и самонаведения. Автономная система управления обладает практически абсолютной помехозащищенностью, так как такая система управления расположена целиком на ракете и ее работа не зависит от внешних воздействий. Основной недостаток — невозможность наведения ракеты на быстродвижущиеся и маневрирующие цели. Кроме того, автономные системы обладают меньшей точностью по сравнению с системой самонаведения. Автономное управление вследствие его информационной автономности непригодно для наведения на цели, расположение или параметры движения которых известны до пуска аппарата недостаточно точно или могут после пуска существенно измениться. Автономное управление может быть программным или самонастраивающимся. При программном управлении летательный аппарат должен двигаться по программной (номинальной) траектории, т. е. траектории, выбранной до пуска аппарата и зафиксированной соответствующим программным механизмом, установленным на его борту. При этом задача управления сводится к измерению отклонений аппарата от номинальной траектории и ликвидации этих отклонений. Однако программное управление в общем случае не является оптимальным. Типичная функциональная схема системы автономного программного управления изображена на рис. 1.10. Автопилот, состоящий из усилителя-преобразователя УП, исполнительного механизма (рулевых машин) ИМ и датчиков обратных связей Д 1 и Д 2, вырабатывает требуемые отклонения рулевых органов на основе поступающих на входы усилителя-преобразователя данных u1 , u2 , u3 и u4 , где: 1 u — совокупность данных, поступающих от программного механизма и задающих требуемый закон движения аппарата. u2 — совокупность данных, определяющих фактический закон движения центра масс (координаты, скорость, ускорение) аппарата. Устройство, вырабатывающее эти данные, называется координатором. u3 — совокупность данных о поворотах корпуса аппарата вокруг его центра масс (углах поворота и их производных). Эти данные вырабатываются датчиками Д 1 угловых поворотов корпуса аппарата—свободными и прецессионными гироскопами. u4 —совокупность данных о движении рулевых органов (например, об углах поворота рулей и производных этих углов), вырабатываемых датчиками Д2. В зависимости от типа координатора автономные системы управления делятся на инерциальные, астронавигационные, радиотехнические и другие. В инерциальных системах данные о законе движения центра масс аппарата получают путем измерения и интегрирования ускорения W , осуществляемого акселерометрами (измерителями ускорений) и интеграторами ускорений. Астронавигационные системы основаны на определении положения центра масс аппарата с помощью пеленгации излучения небесных тел, осуществляемой специальными приборами-секстантами, установленными на борту аппарата. Координаторы радиотехнических автономных систем весьма разнообразны и обычно основаны на применении радиовысотомеров и допплеровских измерителей путевой скорости или на приеме на борту управляемого аппарата радиоизлучения различных ориентиров, расположенных вне КП и цели (пункта назначения). При этом ориентирами могут служить в принципе любые источники достаточно интенсивного радиоизлучения, положение и параметры движения которых в фиксированной системе координат (например, в географической, геоцентрической или гелиоцентрической) известны априори с достаточной точностью и могут поэтому вводиться в автопилот непосредственно, т. е. без применения дополнительных измерителей. В частности, может использоваться радиоизлучение Солнца и некоторых 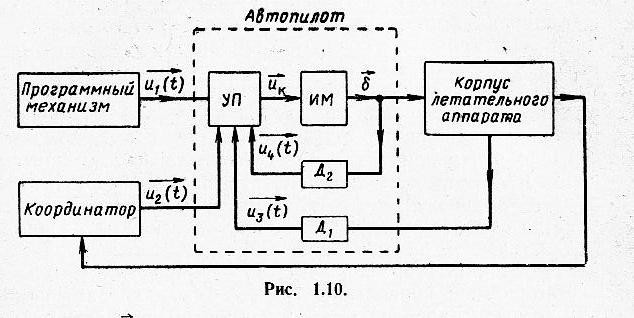 «радиозвезд» или излучение радиопередающих устройств, установленных на ИСЗ или на Земле. При этом, если радиопередающие устройства устанавливаются специально для управления (навигации), а не для решения других задач, то система управления, оставаясь автономной в информационном отношении, теряет свою аппаратурную автономность. Для повышения точности автономных систем часто применяется комбинирование (комплексирование) различных типов координаторов. Например, в астроинерциальных системах инерциальные координаторы комплексируются с астронавигационными, а в радиоинерциальных — с радиотехническими. «радиозвезд» или излучение радиопередающих устройств, установленных на ИСЗ или на Земле. При этом, если радиопередающие устройства устанавливаются специально для управления (навигации), а не для решения других задач, то система управления, оставаясь автономной в информационном отношении, теряет свою аппаратурную автономность. Для повышения точности автономных систем часто применяется комбинирование (комплексирование) различных типов координаторов. Например, в астроинерциальных системах инерциальные координаторы комплексируются с астронавигационными, а в радиоинерциальных — с радиотехническими.Системы самонаведения.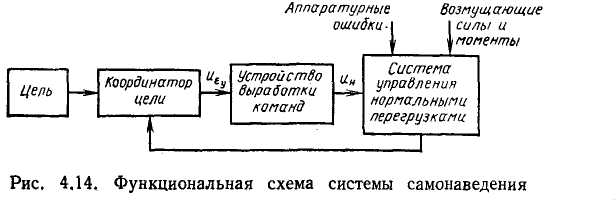 Основной информацией, используемой при реализации самонаведения, служат данные о параметрах относительного движения ракеты и цели. Рассмотрим рис. 4.1, на котором изображены соотношения параметров для общей схемы наведения. Основной информацией, используемой при реализации самонаведения, служат данные о параметрах относительного движения ракеты и цели. Рассмотрим рис. 4.1, на котором изображены соотношения параметров для общей схемы наведения.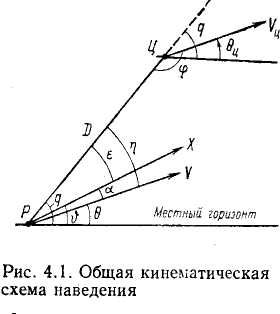 В первом, достаточно грубом приближении будем предварительно считать, что перехват происходит в плоскости векторов скорости перехватчика V и цели V ц. РЦ — линия визирования цели; — угол упреждения — угол между вектором скорости перехватчика и линией визирования; — угол пеленга — угол между продольной осью ракеты и линией визирования; — угол тангажа; — угол атаки; q — угол наклона линии визирования к местному горизонту; D — расстояние между перехватчиком и целью (относительная дальность до цели).  На рис. 4.2 представлена упрощенная схема системы самонаведения. Нетрудно видеть, что закон управления ракетой в общем виде может быть записан как p = f(V, , , , D, q ...). (4.3) Здесь р — угол отклонения руля. Рассмотрение рис. 4.1 и 4.2 позволяет укрупненно выделить три группы систем самонаведения:  В системах первой группы в процессе сближения меняется по определенному закону угол В системах первой группы в процессе сближения меняется по определенному закону уголпеленга цели в связанных осях ракеты. В простейшем случае угол пеленга е сводится системой управления к нулю. Такой метод называется прямым наведением. В системах второй группы меняется по определенному закону угол упреждения = varia. В частном случае угол упреждения поддерживается нулевым (метод погони) или равным некоторой постоянной величине (наведение с постоянным углом упреждения). В системах третьей группы при управлении движением ракеты обеспечивается определенное положение линии визирования цели относительно некоторого направления, фиксированного в пространстве. В частном случае q = const. Это метод параллельного сближения. Следует отметить, что для случаев, когда связи накладываются на закон изменения углов или q, траектории (по крайней мере, идеальные) можно рассчитывать, не прибегая к уравнениям динамики объекта, так как даже одни кинематические соотношения составляют замкнутую систему. Динамические же уравнения объекта в этом случае характеризуют лишь маневренные свойства ракеты. Для случая, когда связи накладываются на угол пеленга е, необходимо учитывать и кинематические и динамические уравнения, так как необходимо контролировать угол атаки , а следовательно, вводить в рассмотрение и уравнения движения ракеты. Понятие о системах управления самонаводящихся ракет. Информация об относительном положении цели при самонаведении получается на борту ракеты с помощью устройства, называемого координатором цели. Поскольку положение цели относительно ракеты в системах самонаведения может быть определено лишь в системе координат, связанной с координатором, на его выходе будет иметь место сигнал ошибки, преобразуемый затем в сигнал наведения и поступающий в систему управления нормальными перегрузками (рис. 4.14). В зависимости от месторасположения первичного источника энергии самонаведение подразделяется на три типа: активное, полуактивное и пассивное. Каждый из указанных типов самонаведения обладает присущими только ему достоинствами и недостатками. Так, например, достоинством активного и пассивного самонаведения является полная автономность после захвата цели координатором, в то время как полуактивное самонаведение ограничивает маневр носителя, который в процессе наведения ракеты должен выдерживать траекторию наведения, отвечающую условию обеспечения облучения цели. Пассивное самонаведение обладает существенно меньшей дальностью действия, чем активное, но превосходит последнее с точки зрения скрытности процесса, более высокой надежности, меньших габаритных размеров и массы системы. Системы теленаведенияСистемы теленаведения являются следящими. Они обеспечивают движение ТС по определенному курсу, задаваемому токонесущими проводами, радио или световым лучом. Если при телеуправлении модуляция сигнала осуществляется на пункте управления, то при теленаведеиии несущее колебание оказывается модулированным лишь в месте приема.При использовании проводных каналов обеспечивается направленное движение ТС вдоль проводов. Такие системы часто называют индукционными системами,автоматического вождения автомобиля. При задании курса неподвижным радио.или световым лучом осуществляется прямолинейное движение. Изменение направления движения при телеиаведении происходит в результате смещения луча.Автоматическая система теленаведения по радиоканалу с амплитудной равносигнальной зоной работает следующим образом.При помощи переключателя с определенной частотой происходит переключение передающих антенн, расположенных на ПУ. Благодаря этому в пространстве создается равносигнальное направление OA. Если ТС находится в равносигнальной направлении, сигнал, принимаемый антенной, находящейся на борту, не модулирован. Если ТС смещено относительно линии OA, сигнал модулирован по амплитуде. Глубина амплитудной модуляции сигнала характеризует угол смещения ТС относительно равносигнального направления. Для определения направления смещения используется синхронное с переключением антенн изменение частоты радиопередатчика. Сигнал, принятый антенной и усиленный приемником, поступает на усилитель-преобразователь, вырабатывающий управляющее напряжение, величина которого зависит от угла смещения ТС относительно равносигнального направления, а полярность— от направления смещения. Это напряжение воздействует на управляющее устройство (электрический двигатель, пневматическую или гидравлическую систему) рулевого привода, выводящее ТС на равносигнальное направление. При этом амплитудная модуляция отсутствует и управляющее напряжение не вырабатывается. В данной системе траектория движения ТС задается при помощи равносигнального направления, а бортовая аппаратура обеспечивает отслеживание этого направления. Возможны и другие методы задания курса движения ТС. Находят также применение дистанционные системы, обеспечивающие одновременное управление курсом и скоростью движения ТС. Возможно, например, использование токонесущего провода (обеспечивающего движение ТС по трассе), по которому одновременно передаются с помощью того или иного вида модуляции команды на изменение скорости движения автомобиля.Комбинированные системы наведения.Выбор системы наведения определяется тактическими соображениями боевого применении снаряда, техническими возможностями каждой системы наведения (главным образом, дальностью действия и точностью наведения) и техническими характеристиками пусковых устройств). Часто для того чтобы удовлетворить сложным тактико- техническим требованиям, применяют комбинированные системы наведения. В комбинированных системах различные системы наведении используются последовательно или параллельно во времени. В первом случае на разных этапах движения летательного аппарата применяют различные системы наведения. Так, например, для зенитного управляемого снаряда возможно следующее комбинирование систем наведения: 1.автономное наведение на начальном участке траектории; 2.наведение по командам или по лучу на среднем участке; 3.самонаведение на конечном участке. Во втором случае различные системы наведения используют одновременно. Примером может служить астроинерциальная система, представляющая собой комбинацию инерциальной и астронавигационной систем. Такая система считается практически наилучшим вариантом автономной системы. Задачи автоматической стабилизации на траектории. (внизу нормальные формулы к этому вопросу)Автоматическое управление траекторным движением самолета на маршруте обеспечивает лишь эпизодическое участие или практически полное невмешательство пилота в процесс управления. Это возможно в том случае, когда решена задача автоматического управления угловым управления высотой служат для освобождения пилота от ручной стабилизации и управления самолетом на траектории в вертикальной плоскости. Пример Простейшая САУН реализует следующий закон управления рулем высоты: положением самолета. Благоприятное влияние автоматики на процесс управления dСАУН =k в w z wz +kJ DJ +kН (H - H0 ) , (10.1) полетом самолета проявляется в улучшении качества где САУН d в автоматическое отклонение руля высоты от переходных процессов возвращения самолета к исходной траектории после непроизвольного отклонения под действием внешних возмущений. Так осуществляется автоматическая стабилизация траекторного движения на маршруте. Основной траекторный параметр продольного движения самолета на маршруте - высота полета. При больших дальностях полета оптимальным эшелоном крейсерского полета является максимальный эшелон в пределах ограничений полетной массы. Для управления высотой и продольным траекторным движением используются: Система автоматического управления высотой ( САУН ) обеспечивает стабилизацию и управление балансировочного положения; DJ - приращение опорного (т.е. имевшего место в момент включения режима) угла тангажа J 0 ; H , H0 -соответственно текущее и опорное (в момент включения режима) значения барометрической высоты; kН - передаточный коэффициент по барометрической высоте, определяющий угол отклонения руля высоты при возникновении рассогласования между значениями текущей и опорной барометрической высоты в 1м. Закон управления (10.1) можно также представить как закон управления автопилота угла тангажа, обеспечивающий формирование заданного угла тангажа пропорционально приращению барометрической высоты: dСАУН =k w +k (DJ - DJ ) , J продольным траекторным движением самолета в wz z J зад (реагирует на рассогласования между значениями текущей и заданной барометрической высоты). DJ =J - J 0 , DJ зад =kH (H0 - H) , (10.2) Система автоматического управления где DJ , DJ зад соответственно приращение текущего и вертикальной скоростью (рассогласования между текущим значением угла тангажа и его заданным значением, определяемым заданным значением вертикальной скорости). Система автоматического управления высотой через контур нормальной перегрузки (рассогласования между значениями текущего и заданного приращений нормальной перегрузки). Система автоматического управления нормальным ускорением (рассогласования между значениями текущего и заданного приращений нормальной перегрузки) Основными траекторными параметрами бокового движения самолета являются линейное боковое и угловое отклонения от линии заданного пути. Поэтому различают системы автоматического управления боковым линейным и угловым отклонениями. Для автоматической стабилизации боковых отклонений на траектории используются: Система автоматического управления курсом с учетом угла сноса (рассогласования между текущим и заданным значениями курса с учетом угла сноса). Система автоматического управления отклонением от заданногоазимута Система автоматического управления путевым углом Система автоматического управления линейным боковым отклонением самолета отЛЗП Принцип действия. Самолет как объект управления неустойчив в продольном траекторном движении по высоте при действии внешних возмущений. Для стабилизации самолета по высоте пилот, наблюдая за изменением высоты по высотомеру, воздействует на колонку штурвала и отклоняет руль высоты таким образом, чтобы самолет удерживал требуемое значение высоты или изменял его соответствующим образом. Системы автоматического заданного значений угла тангажа; H - передаточный k J коэффициент по углу тангажа, определяющий на сколько градусов должен измениться угол тангажа при возникновении рассогласования между значениями текущей и опорной барометрической высоты в 1 м. Сервоприводы систем автоматического управления включаются по параллельной схеме в прямые обратимые системы управления, либо по последовательной схеме в бустерные или электродистанционные системы управления. Совместное управление рулем высоты со стороны пилота и САУН исключается. При воздействии пилота на колонку штурвала САУН выключается и освобождает механическую проводку управления рулем высоты. Сервоприводы бывают как электромеханического, так и электрогидравлического принципа действия. При наборе высоты и снижении пилоту приходится выдерживать определенную вертикальную скорость. Он наблюдает за ее изменении по вариометру и воздействует на колонку штурвала, чтобы самолет удерживал требуемое значение вертикальной скорости или изменял ее соответствующим образом. Системы автоматического управления вертикальной скоростью служат для автоматизации маневров самолета в вертикальной плоскости. Задачи автоматической стабилизации скорости полёта.Для самолетов ГА различают следующие основные режимы полета: максимальной крейсерской скорости, максимальной дальности, экономический крейсерский режим. Выполнение этих режимов связано с управлением скоростью полета самолета. Режим максимальной крейсерской скорости, определяемый с учетом ограничений по скоростям  нормальной эксплуатации, применяется, когда отсутствуют ограничения по расходу топлива, а максимальная коммерческая нагрузка не ограничена взлетной массой или массой заправляемого топлива. Тогда крейсерские скорости близки к максимальным при нормальной эксплуатации. нормальной эксплуатации, применяется, когда отсутствуют ограничения по расходу топлива, а максимальная коммерческая нагрузка не ограничена взлетной массой или массой заправляемого топлива. Тогда крейсерские скорости близки к максимальным при нормальной эксплуатации.Режим максимальной дальности используется в тех случаях, когда максимальная коммерческая нагрузка ограничена взлетной массой или заправляемым топливом, а также при полете на неоптимальных эшелонах. Этому режиму соответствуют числа М, при которых километровый расход топлива едва превышает (на 1%) минимальный. Тогда скорости тангажа ДУС, датчик угла тангажа - гировертикаль ГВ, датчик рассогласования между значениями текущей и опорной скорости - корректор скорости КС, вычислитель ВСАУV и сервопривод руля высоты СП dв . Простейшая САУV реализует следующий закон управления рулем высоты: обеспечивается максимальная коммерческая нагрузка, а dСАУV =k в w z wz +kJ DJ +kV (V0 - V) , (10.49) также достаточная устойчивость по скорости. Наивыгоднейшие числа М этого режима зависят от где САУV d в автоматическое отклонение руля высоты от полетной массы и высоты эшелона. Экономический режим балансировочного положения. DJ - приращение опорного применяется, когда нет ограничений по максимальной угла тангажа DJ =J - J 0 ; V ; V0 соответственно текущее коммерческой нагрузке. Этому режиму также соответствуют определенные оптимальные числа М. К факторам, влияющим на режимы крейсерского полета, относятся высота эшелона, температура наружного воздуха, направление и скорость ветра. Благоприятное влияние автоматики на процесс управления полетом проявляется в улучшении качества переходных процессов возвращения самолета к требуемой скорости или требуемому числу М после непроизвольного отклонения под действием внешних возмущений. Так осуществляется автоматическая стабилизация скорости и числа М при наборе высоты, крейсерском полете и снижении. и опорное (в момент включения режима) значения скорости; kV - передаточный коэффициент по скорости, определяющий угол отклонения руля высоты при возникновении рассогласования между значениями текущей и опорной скорости в 1 км/ч. Другими словами, отклонение руля высоты прямо пропорционально угловой скорости тангажа, приращению опорного угла тангажа и приращению скорости. Закон управления (10.49) можно также представить как закон управления автопилота угла тангажа, обеспечивающий формирование заданного угла тангажа пропорционально приращению скорости: Существуют два основных способа управления скоростью и dСАУV =k w +k (DJ - DJ ) , числом М: воздействием на руль высоты и на тягу в wz z J зад двигателей. В первом случае тангенциальное ускорение DJ =J - J 0 , DJ зад =kV (V - V ) , (10.50) k J создается вследствие изменения аэродинамической силы J 0 лобового сопротивления, а во втором случае - изменением где V - передаточный коэффициент по скорости к углу тяги. Первый способ применяется обычно на маршруте. При этом путем изменения тяги двигателей обеспечивается требуемый режим изменения высоты: если тяга больше необходимой для горизонтального полета, набор высоты, меньше — снижение. Принцип действия. Самолет как объект управления, как правило, обладает статической устойчивостью в продольном траекторном движении по скорости при действии внешних возмущений. Однако возвращение самолета к исходному режиму по скорости может сопровождаться значительными статическими ошибками и существенной колебательностью. Кроме того, условиями эксплуатации самолета скорость ограничивается по максимуму и минимуму. Поэтому при полете на режимах, близких к граничным, скорость должна строго контролироваться. При ручном пилотировании задачи стабилизации и контроля за скоростью решает пилот. Он наблюдает за изменением скорости по указателю и, воздействуя на колонку штурвала, отклоняет руль высоты таким образом, чтобы самолет удерживал требуемую скорость или изменял ее соответствующим образом. Системы автоматического управления скоростью (( САУV )) служат для освобождения пилота от решения этой задачи. Пример Принцип действия, устройство и работа САУV во многом аналогичны принципу действия, устройству и работе САУН . В состав САУV (рис. 10.24) входят датчик угловой тангажа. САУV работает в двух режимах: согласования и стабилизации скорости. В режиме согласования в корректоре скорости происходит непрерывное обнуление сигнала текущей скорости с помощью электромеханической следящей системы. Это происходит, когда система работает в автопилотном режиме стабилизации угла тангажа. Таким образом обеспечиваются запоминание текущей скорости и подготовка к безударному включению САУV для стабилизации скорости. Включение режима стабилизации скорости приводит к отключению следящей системы корректора. Тогда на его выходе формируется сигнал разности uDV , между опорным значением скорости, которую имел самолет в момент включения режима стабилизации, и значением текущей скорости. Оптимальное управление самолетом связано с минимизацией удельного километрового расхода топлива, который зависит от условий полета. С изменением температуры воздуха меняется удельный расход топлива и число М вследствие изменения скорости звука, хотя скорость может выдерживаться постоянной. Известно, что удельный расход и скорость звука меняются топлива и режим работы двигателей остаются неизменными при изменении температуры. Воздушная скорость при этом является переменной. Для автоматизации решения этой задачи предусмотрен соответствующий режим работы САУ. Стабилизация скорости полета с помощью автомата тяги при использовании в законе управления сигналов по скорости и тангажуВНИЗУ ПОСЛЕ №2 ВОПРОСА Связанное регулирование скорости и высоты полета. Раздельное исследование характеристик контуров стабилизации угла тангажа, высоты, скорости полета ЛА возможно лишь при весьма серьезных допущениях. В общем случае взаимное влияние указанных контуров столь существенно, что целесообразно анализ и синтез управления продоль- ным движением проводить применительно к продольному каналу в целом. Полную систему уравнений для системы стабилизации скорости и высоты полета удобно принять в форме [8.2] (8.39) в оба канала (уравнения четвертое и пятое системы (8.39)). С помощью таких перекрестных связей можно добиться автономности контуров стабилизации высоты и скорости.  Условия автономности можно записать так: (8.40) Условия автономности можно записать так: (8.40)(8.41) 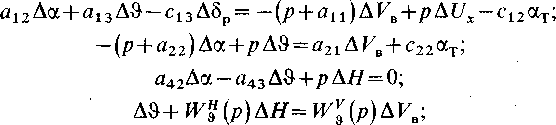 (8.42) 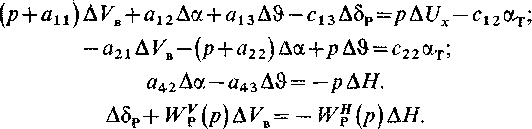 (8.43) Условиям автономности (8.40) и (8.41) соответствуют условия равенства нулю частных определителей систем (8.42), (8.43): Окончательные выражения для 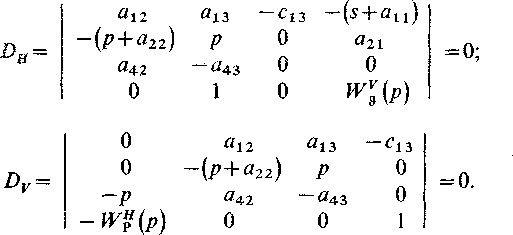  (8.44) (8.44)(8.45) Таким образом, для обеспечения автономности контуров стабилизации высоты и скорости из (8.44) и (8.45) следует сформировать перекрестные управляющие сигналы: позиционный сигнал, пропорциональный Cистема кинематических уравнений движения самолета имеет вид: dH y V dt 0 sin θξ Г ; Автоматизация управления продольным движением ЛА на второй фазе посадки. H yDГ sin ξ ; 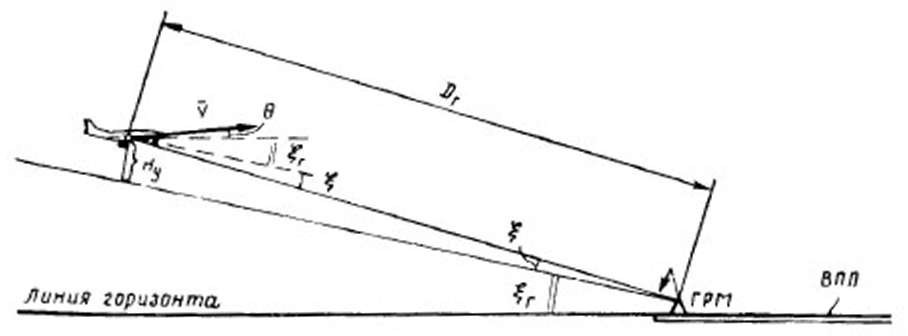 t t DГDГ0V0cos θξГ ξdt. 0 Где Hу —условная высота самолета над глиссадойРис.3. Кинематика продольного движения (отсчитывается по перпендикуляру к глиссаде); DГ0 —самолета на второй фазепосадки. начальное значение расстояния до ГРМ. Принимая во внимание малость углов θ , ξГ и ξ и производя замену θθ0 ΔθξГ Δθ Δα , после исключения промежуточных переменных, получим t t dξξΔθΔα , 0 где t dt DГ0 . 0 V0 Рассмотрим два варианта закона управления продольным движением: статический: Δϑkξ ξ астатический: dΔϑ k dt ξ ξk dξ ξ dt . В исследуемую систему уравнений необходимо также включить уравнение равновесия сил по оси у, которые представим в виде: |