СУЛА. Закон регулирования на работу системы стабилизации (движение крена). В реальных системах переключение рулей отстает на время
 Скачать 1.09 Mb. Скачать 1.09 Mb.
|

Δα dΔϑ c ΔUdt 21 x c22 α Г . t dξ ξ Δϑ Δα0 dt 0 t Итак, для статического варианта закона управления имеем систему уравнений: При условии стабилизации воздушной скорости слагаемое c21 ΔUx в правой части этого уравнения не должно присутствовать. Однако если учесть, что в силу инерции самолета переходные процессы по параметру ΔV протекают всегда значительно медленнее, чем процессы по ΔV B , в исследуемом случае целесообразно принять ΔV 0 что предполагает стабилизацию путевой скорости. Δϑ kξ ξ0 Исключая промежуточные переменные, получаем следующее уравнение относительно ξ : d2 ξ dξ t 0t dt 2 a22 t0t 2 dt a22 kξ 1 ξc21 ΔU x c22 α Г . Соответственно для астатического варианта закона управления получаем уравнение: d3 ξ d2 ξ dξ dΔUx dα Г t0t dt3 a22 t0t3 dt2a22 kξ2 dt a22 kξξc21 dt c22 dt . Сравнивая два последних уравнения, нетрудно заметить, что обеспечение устойчивости системы с астатическим законом управления сложнее, чем системы, использующей статический закон, несмотря на то, что в последнем принято k 0 . Учитывая также, что в силу физической природы возмущений ΔU x и α Г их средние величины в процессе планирования по глиссаде остаются, как правило, небольшими, при использовании статического закона нельзя ожидать появления существенной статической ошибки, тем более, что последняя уменьшается с увеличением k ξ . По этим причинам можно отдать предпочтение статическому закону управления продольным движением. Классификация СУ ЛА. Системы автоматического управления классифицируются по различным признакам. По виду передаваемых сигналов выделяют системы непрерывные, с гармонической модуляцией, импульсные, релейные и цифровые. По способу математического описания, принятого при исследовании, выделяют линейные и нелинейные системы. Обе группы могут быть представлены непрерывными, дискретными и дискретно-непрерывными системами. По виду контролируемых изменений своих свойств различают неприспосабливающиеся и приспосабливающиеся (адаптивные) системы. В последнем классе можно выделить самонастраивающиеся системы с самонастройкой параметров или воздействий и самоорганизующиеся системы с контролируемыми изменениями структуры. В зависимости от принадлежности источника энергии, при помощи которого создаётся управляющее воздействие, системы могут быть прямого и непрямого действия. В системах прямого действия используется энергия управляемого объекта. К ним относятся простейшие системы стабилизации (уровня расхода, давления и т.п.), в которых воспринимающий элемент через рычажную систему непосредственно действует на исполнительный орган (заслонку, клапан и т.д.). В системах непрямого действия управляющее воздействие создаётся за счёт энергии дополнительного источника. СУ делятся так же по способу управления на системы с ручным, полуавтоматическим (директорным) и автоматическим управлением. [2] Автоматическое управление на многих этапах полета является основным способом управления на современных пилотируемых ЛА. Автоматическое управление «в малом», когда САУ парирует сравнительно небольшие возмущения и отклоняет органы управления в пределах 10-20% максимально допустимых отклонений, осуществляется почти на всех этапах полета. Автоматическое управление распространяется на область управления движением центра директорным прибором команды о необходимых воздействиях на органы управления. Индикаторы команд директорного управления совмещаются с указателями положения самолёта относительно горизонта и заданной траектории, а также с указателем скольжения в командно- пилотажных приборах. Директорное управление существенно упрощает процесс пилотирования по приборам и применяется главным образом при взлёте, заходе на посадку и уходе на второй круг. Команда управления формируется как разность текущего и заданного значений выбранного для директорного управления параметра короткопериодического движения самолёта, например, углов крена и тангажа (или нормальной перегрузки). Выдаваемое значение параметра директорного управления является суммой сигнала отклонения от траектории и сигнала скорости его изменения. Конструктивно принцип директорного управления реализуется в директорных системах траекторного управления, включающих вычислитель команд управления, контрольно-пилотажный и навигационно-плановый приборы. Чаще всего директорная система входит в состав бортовой системы автоматического управления При ручном или (как его ещё называют) штурвальном управлении отклонение лётчиком органов управления может выполняться непосредственно (так называемое обратимое ручное управление), когда лётчик, прикладывая усилия к рычагу управления, уравновешивает полностью или частично аэродинамический шарнирный момент отклоняемого органа управления. В этом случае перемещение рычага управления требует от лётчика непрерывной затраты энергии. Другой вид ручного управления — необратимое. Он связан с использованием для отклонения органов управления каких-либо вспомогательных устройств и источников энергии, например гидравлическая или электрическая системы.[6] Комлексы СУ ЛАК комплексам СУЛА относятся системы: Стабилизации ЛА Управления скоростью полета Наведения Система стабилизации — это группа устройств, расположенных на летательном аппарате и обеспечивающих сохранение требуемого углового положения или установившегося углового движения летательного аппарата. Иногда эту группу устройств называют автоматом стабилизации.Обычно беспилотный летательный аппарат стабилизируется относительно всех трех его координатных осей. В некоторых системах управления полётом принципиально можно обойтись без стабилизации крена, однако с целью повышения точности управления и улучшения условий пуска беспилотные летательные аппараты и в таких случаях, как правило, снабжаются системой стабилизации угла крена или угловой скорости крена. Заметим, что при полёте в достаточно плотных слоях атмосферы стабилизация беспилотного летательного аппарата относительно осей Ot/i и Ozx в некоторых случаях может осуществляться без применения автоматических устройств — аэродинамическими средствами путем придания летательному аппарату свойств статической устойчивости. Так как при вращении летательного аппарата вокруг продольной оси Oxi аэродинамические силы практически не изменяются, то стабилизация крена не может быть получена с по- мощью аэродинамики. Для этой цели могут служить лишь автоматические системы стабилизации угла или угловой скорости крена. Так как на летательный аппарат беспрерывно действуют возмущающие силы и моменты, автоматические системы стабилизации, очевидно, должны быть системами замкнутого типа. В таких си- стемах стабилизация осуществляется путем создания управляющих моментов, направленных на уничтожение возникшей ошибки (рассогласования) е. Требования, предъявляемые динамическим свойствам рулевого привода. От промышленных приводов, т. е. силовых приводов, применяющихся в других областях техники, рулевые приводы управляемых ракет отличаются значительно большим быстродействием и особенностями конструкции, приспособленной к особым условиям их работы. В первую очередь здесь следует отметить жесткие требования к. весу и габаритам привода и к расходу энергии на управление летательным аппаратом. Кроме того, конструктор рулевого привода должен обеспечить достаточную величину тормозного момента для преодоления момента нагрузки и мощность, необходимую для достаточно быстрого отклонения органов управления при наличии нагрузки [12]. Все эти характеристики (вес, габариты, затраты энергии, тормозной момент, мощность) зависят от требуемого быстродействия привода и от нагрузки. Следует также отметить, что ру- , левые приводы управляемых ракет должны действовать с высокой степенью надежности в условиях высоких перегрузок, интенсивных вибраций с большим диапазоном частот, высоких уровней электрических шумов, в широких температурных пределах и т. д. Перечисленные конструктивные и эксплуатационные требования настолько существенно влияют на выбор типа и характеристик рулевого привода, что при проектировании системы стабилизации рулевой привод приходится рассматривать как заданный элемент этой системы, как часть летательного аппарата. Хотя основные характеристики привода выбираются без учета тех свойств, которыми должна обладать система стабилизации, он все же является одним из элементов этой системы. Поэтому характеристики рулевого привода должны 'быть согласованы с характеристиками других элементов системы стабилизации и с характеристиками этой системы в целом. Со стороны системы стабилизации, например, предъявляются требования, чтобы рулевой привод имел малую колебательность, а его полоса пропускания заметно превышала полосу пропускания системы стабилизации. При выполнении этих условий рулевой привод не будет давать больших амплитудных и фазовых искажений в полосе частот, пропускаемых системой стабилизации. Динамические характеристики рулевого привода как элемента системы стабилизации могут быть улучшены выбором соответству-юшей обратной связи привода, добавлением внутренних обратных связей и введением в цепь обратной связи корректирующих зве Основные задачи, решаемые системой стабилизации кренаЗадачи, решаемые системой стабилизации крена, определяются способом создания аэродинамической нормальной силы, типом системы наведения и способом преобразования сигналов наведения в отклонения органов управления. У летательного аппарата обычной самолетной схемы, например, самолета или самолета-снаряда, когда крылья расположены в одной плоскости, аэродинамическая нормальная сила создается путем поворота аппарата относительно поперечной и продольной осей (Oz1 и Ox1), т. е. изменением углов атаки и крена. При этом величина аэродинамической нормальной силы определяется углом атаки, а ее направление — углом крена. Такой способ управления полетом летательного аппарата получил название полярного управления (т. е. управления в полярной системе координат). При полярном управлении вращение летательного аппарата относительно нормальной оси Оу1 может быть свободным, при этом будут отсутствовать органы управления рысканием. Очевидно, что основной задачей системы управления креном у летательного аппарата с полярным управлением является изменение угла крена в соответствии с заданной программой полета или сигналами наведения. Основной задачей системы стабилизации крена при автономном наведении и теленаведении осесимметричных летательных аппаратов является сохранение угла крена неизменным и равным нулю. Эту задачу иногда называют жесткой стабилизацией крена. В случае формирования сигналов наведения на борту летательного аппарата, т. е. при самонаведении и командном наведении в координатах летательного аппарата, стабилизация угла крена не требуется. При вращении летательного аппарата вокруг продольной оси поворачивается и система координат, в которой производится измерение координат цели и вырабатываются сигналы наведения. При этом не нарушается правильная координация между сигналами наведения и каналами автопилота. Однако угловая скорость крена у обычно приводит к появлению перекрестных связей между каналами тангажа, рыскания и крена, которые могут существенно повлиять на процесс самонаведения. Одной из причин этих связей могут являться некоторые особенности аппаратуры управления. Для того чтобы возможно больше ослабить влияние перекрестных связей на процесс самонаведения осесимметричиых летательных аппаратов, на систему стабилизации крена обычно возлагают задачу ограничения угловой скорости крена. При пуске управляемых снарядов классов «воздух— земля» и «воздух—воздух» в ряде случаев требуется стабилизация движения крена с целью предотвращения аварии. (2.1)  Здесь Здесь(2.2) Структурная схема системы стабилизации угловой скорости крена в достаточно общем виде представлена на рис. 1.1. На (2.1.4) 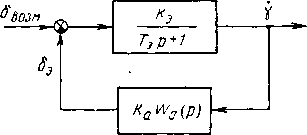 Рис. 1.1 Структурная схема системы стабилизации угловой скорости крена Реакция системы стабилизации на возмущающий момент описывается соответствующей передаточной функцией замкнутой системы (2.1.5) постоянной времени летательного аппарата в раз. Следовательно, эффект обратной связи по угловой скорости крена эквивалентен повышению аэродинамического демпфирования или снижению инерционности летательного аппарата. В результате переходный процесс затухает значительно быстрее. Увеличивая передаточный коэффициент автомата стабилизации Ка, можно повысить быстродействие системы стабилизации. (2.1.8) или Этот же результат имеет место для любого автомата стабилизации, не содержащего интегрирующих звеньев, так как при указанном условии Wа(0)= 1. поддерживать нулевую угловую скорость Чтобы уменьшить ошибку, надо выбирать возможно большее значение передаточного коэффициента разомкнутой Техническими условиями на проектирование системы стабилизации обычно задается наибольшая допустимая установившаяся ошибка γусттах при реально возможном в данной системе Мхв. Из этого условия по формуле (2.1.9) определяется необходимое значение К0, а затем и Ка. Рассмотрим возможные способы реализации обратной связи по угловой скорости крена. Все они различаются главным образом: способом получения информации; способом преобразования информации в отклонения органов управления. Информация об угловой скорости крена, вообще говоря, может обеспечиваться: дифференцирующим гироскопом; свободным гироскопом с дифференцирующим устройством; интегрирующим гироскопом. Методы стабилизации угловой скорости крена: Стабилизация с помощью роллеронов Простейшую систему стабилизации угловой скорости крена, использующую в качестве источника информации дифференцирующий гироскоп, представляет летательный аппарат с роллеронами. Роллерон — это отклоняющаяся наподобие элерона аэродинамическая поверхность, на которой установлен достаточно массивный ротор (с моментом инерции Iр), вращающийся под действием воздушного потока с некоторой угловой скоростью Ω. Благодаря тому, что ротор вместе с аэродинамической поверхностью может поворачиваться относительно ее оси вращения, он обладает свойством дифференцирующего гироскопа, предназначенного для измерения угловой скорости крена. Основными достоинствами такой системы стабилизации являются, очевидно, ее простота, малый вес и надежность. Однако возможности ее применения сильно ограничены. Передаточный коэффициент роллерона определяется его конструкцией и диапазон возможных значений этого коэффициента невелик. Поэтому задача проектирования системы стабилизации угловой скорости крена посредством роллеронов состоит в рациональном выборе конструкции роллерона и таких аэродинамических характеристик летательного аппарата, как и поскольку эта задача решается чисто аэродинамическими средствами, удачное решение, по-видимому, возможно лишь при полете в достаточно плотных слоях атмосферы сравнительно небольших управляемых ракет, у которых возмущающие моменты крена невелики. э Система стабилизации с дифференцирующим гироскопом. Угловая скорость крена измеряется дифференцирующим гироскопом, сигнал которого канале крена была значительна выше частоты среза в каналах управления тангажом и рысканием. Целесообразным запасом частот считается одна декада. Так, например, если частота среза каналов тангажа и рыскания составляет 2 1/сек, то для канала крена она должна быть 20 1/сек. Большая частота среза обеспечивает в то же время высокое быстродействие системы стабилизации угловой скорости крена. Астатические системы стабилизации. Введение интегрирующего звена в автомат стабилизации. Интегрирующие звенья, очевидно, могут вводить: рулевой привод, без обратной связи или с изодромной обратной связью (при достаточно большом тормозном моменте); интегрирующий фильтр; интегрирующий гироскоп, являющийся измерителем угловой скорости. Методы стабилизации угла крена.Стабилизация углов и угловых скоростей является одной из задач управления угловым положением ЛА, решение которой может выполняться как вручную, так и автоматически. Самолет как объект управления статичен в быстром боковом короткопериодическом движении, при действии внешнего момента крена или бокового ветра. Ручное управление углом крена пилот осуществляет, воздействуя на колонку штурвала и наблюдая при этом за изменением угла крена по указателю авиагоризонта. Удерживая элероны в отклоненном положении, пилот стабилизирует крен или изменяет его соответствующим образом. Для освобождения пилота от этой задачи служит автопилот угла крена. Автопилот угла крена – средство автоматического управления, обеспечивающее управление и стабилизацию быстрого бокового короткопериодического движения самолета на всех этапах полета путем отклонения элеронов при возникновении рассогласования между значениями текущего и заданного углов крена. Автопилот угла крена работает в трех режимах: согласования, стабилизации и управления углом крена. В режиме стабилизации угла крена рулевая машина включается в управление элеронами. Размыкается электромеханическая следящая система согласования и на вход сервопривода поступает сигнал, пропорциональный отклонению самолета 0 от того угла крена 0 , который он имел в момент включения режима стабилизации. Если значение 0 невелико и не превышает 5-6°, то автопилот приводит самолет к горизонтальному полету и начинает стабилизировать угол курса. В противном случае стабилизируется угол крена. Автопилоты крена различаются по виду обратной связи. Автопилот крена с жесткой обратной связью. Закон управления имеет вид: э( p) (з ) p используется для того, чтобы при помощи рулевого привода отклонять органы управления креном. В рассматриваемой системе стабилизации нельзя полностью избавиться от установившейся ошибки где: и скорости; - передаточные числа по углу и угловой э и з – соответственно приращения медленного вращения летательного аппарата с угловой скоростью . Для того чтобы ослабить перекрестные связи между каналами крена, тангажа и рыскания, обусловленные этой угловой скоростью, рекомендуется, чтобы частота среза в текущего и заданного значений угла крена; [4] з 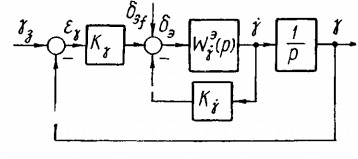 эf( p) эf( p) p3 a э 1 K T p2 a p a 2 1 0 По отношению к возмущениям приложенным ко входу объекта, система имеет астатизм первого порядка. Коэффициент астатизма по скорости возмущения равен: эf 1 K Рисунок 11. И Автопилот крена с изодромной обратной связью. |