Основные требования, предъявляемые к системам стабилизации и управления нормальными перегрузками
Для того чтобы в общих чертах сформулировать основные требования, предъявляемые к системам стабилизации, выполняющим одновременно функцию управления нормальными перегрузками, необходимо отметить некоторые динамические особенности летательных аппаратов.
Для большинства современных летательных аппаратов характерным является слабое затухание быстрого возмущенного движения, что вызывается относительно небольшой площадью оперения и большими высотами полета. Коэффициент относительного демпфирования колебательного звена в передаточных функциях летательных аппаратов, характеризующих движения рыскания и тангажа, редко превышает 0,1-г-0,15. Это обстоятельство затрудняет обеспечение условий
устойчивости и точности системы наведения, если управление нормальными перегрузками осуществляется по разомкнутой схеме.
" Весьма неблагоприятно на процессы наведения может влиять непостоянство динамических характеристик летательных аппаратов, существенно зависящих от высоты и скорости полета.
Нередко на работе системы наведения заметно сказывается нелинейность аэродинамических характеристик.
Все это не позволяет в большинстве случаев управлять нормальными перегрузками по разомкнутой схеме.
Поэтому одна из основных задач системы стабилизации заключается в исправлении динамических характеристик летательных аппаратов.
Исходя из этой задачи рассмотрим, каким требованиям должна удовлетворять система стабилизации.
Прежде всего, свободное движение системы стабилизации должно быть хорошо задем'пфированным. Это
необходимо для
того, чтобы облегчить выполнение условий устойчивости
контура наведения, в
который как составной элемент
входит система стабилизации. Степень демпфирования свободных колебаний системы стабилизации должна выбираться такой, чтобы при резко изменяющихся сигналах наведения (близких к ступенчатым) величина перерегулирования
угла атаки не была бы
слишком большой. Обычно
требуют, чтобы выполнялось неравенство а<30%. Это
необходимо для ограничения выбросов нормальной перегрузки и в
некоторых случаях для того, чтобы избежать влияния нелинейности аэродинамических
характеристик, проявляющейся при больших
углах атаки.
Для повышения точности наведения необходимо, чтобы динамические характеристики системы стабилизации слабо зависели высоты и скорости полета летательного аппарата. В первую очередь требуется возможно меньшее изменение передаточного коэффициента замкнутого контура стабилизации по нормальной перегрузке. Это связано с тем, что неконтролируемые его изменения могут потребовать уменьшения передаточного коэффициента разомкнутого контура наведения для обеспечения необходимых запасов устойчивости, что в свою очередь может оказать влияние на точность наведения.
Таким образом, для исправления динамических характеристик летательного аппарата система стабилизации должна удовлетворять следующим требованиям.
Свободные колебания системы стабилизации должны быть хорошо задемпфированы. Степень демпфирования определяется или заданием допустимого
перерегулирования
по
углу атаки при
ступенчатом управляющем воздействии, или соответствующими запасами устойчивости по амплитуде и
фазе.
Динамические характеристики системы стабилизации долж ны слабо зависеть от режима полета; <в особенности это относится к передаточному коэффициенту*по перегрузке. Необходимая степень стабильности характеристик может быть определена при анализе процессов наведения.
Кроме задачи, связанной с исправлением динамических характеристик летательного аппарата, система стабилизации должна решать ряд других задач. Отметим
некоторые из
них.
Система стабилизации должна иметь ширину полосы пропускаемых частот не меньше некоторой заданной. Необходимая ширина полосы пропускания зависит от условий работы системы наведения (от характера полезнйх и возмущающих сигналов), а также от тех требований, которые предъявляются к этой системе.
Система стабилизации должна достаточно эффективно подавлять действие внешних возмущений, приложенных к летательному
аппарату, а также действие внутренних возмущений со стороны аппаратуры самой системы стабилизации. В
некоторых системах наведения, особенно программных, эти возмущения могут существенно влиять на точность наведения. Поэтому компенсация влияния возмущений может быть в
некоторых случаях важной задачей системы
стабилизации.
Наконец, дополнительной задачей системы стабилизации может быть ограничение максимальных перегрузок на некотором заданном уровне, обычно зависящем от прочности элементов конструкции летательного аппарата и бортовой аппаратуры управления.
Так как система стабилизации является одним из элементов,
входящих в замкнутый контур наведения, то естественно, что перечисленные выше требования, которым должна удовлетворять система стабилизации, существенно зависят от требований, предъявляемых к системе наведения.
Требования к системам наведения и стабилизации
нередко противоречат друг
другу. Поэтому при проектировании систем стабилизации
нередко приходится искать компромиссные решения. В
этом случае из всех
требований,
которые предъявляются к системе стабилизации, учитывают в первую очередь те, от удовлетворения
которых в наибольшей степени зависят в данных условиях наиболее важные характеристики
автоматической системы управления полетом.
Система стабилизации летательного аппарата является типичной системой автоматического регулирования, выполняющей простые функции управления. Эти функции заключаются в том, чтобы поддерживать значения некоторых координат
летательного аппарата равными или постоянными, или изменяющимися по определенной программе, или, наконец, произвольно изменяющимися по времени и задаваемыми системой наведения. Во всех перечис-» ленных случаях принцип действия замкнутых систем стабилизации остается одним и тем же, изменяется лишь характер входных управляющих воздействий. Однако от характера этих воздействий в значительной степени могут зависеть требования, предъявляемые к системе стабилизации. Поэтому целесообразно рассмотреть некоторые особенности управляющих воздействий для случаев наведения по программе и наведения на цель.
14.
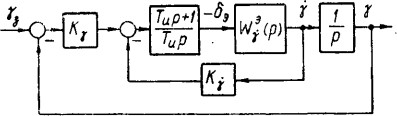
Стабилизация скорости полета с помощью автомата тяги при использовании в законе управления сигналов по скорости и тангажу.На этапах захода на посадку и посадки важное значение приобретает задача стабилизации скорости. Уменьшение скорости полета под действием внешних возмущений ухудшает устойчивость и управляемость самолета, тем самым усложняет пилотирование и может вывести самолет на критические углы атаки. Поэтому на этапах захода на посадку и посадки стабилизация и управление скоростью полета осуществляются непосредственным воздействием на тягу двигателей. Это объясняется большей точностью и большим быстродействием контура управления скоростью путем изменения тяги по сравнению с контуром управления скоростью путем отклонения руля высоты.
Автомат тяги (АТ) - средство автоматического управления, обеспечивающее стабилизацию и управление продольным движением самолета на этапах захода на посадку и посадки путем изменения тяги двигателей при возникновении рассогласования между значениями текущей и заданной скорости.
Простейший АТ реализует следующий закон управления рычагами управления двигателей (РУД):

 -
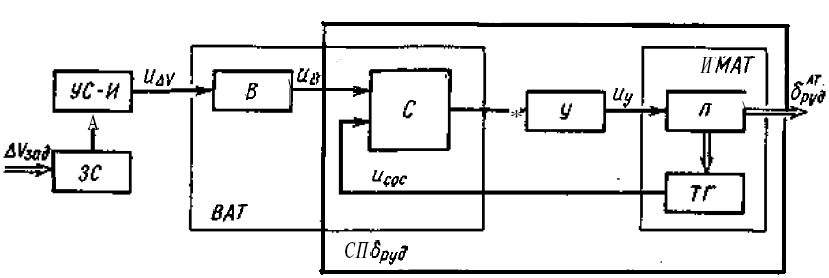
- передаточный коэффициент по скорости, определяющий, на сколько градусов в секунду должна измениться скорость перемещения РУД при возникновении рассогласования между значениями текущей и заданной скорости в 1 км/ч. скорость перемещения РУД пропорциональна рассогласованию между текущей и заданной скоростью полета. Как видно из закона управления сервопривод АТ имеет скоростную обратную связь. Исполнительный механизм сервопривода включается по параллельной схеме в прямую систему управления двигателями. В состав АТ входят задатчик скорости
ЗС, датчик рассогласования между значениями текущей и заданной скорости-указатель скорости с индексом
УС-И, вычислитель
В и сервопривод рычагов управления двигателями с исполнительным механизмом автомата тяги
ИМАТ. Вычислитель и сумматор сервопривода объединены в электронный блок вычислителя автомата тяги
ВАТ. Указатель скорости
УС-И отличается от обычного электромеханического
указателя скорости тем, что наряду со стрелкой, показывающей значение текущей приборной скорости, в нем имеется индекс заданной приборной скорости, управляемый пилотом с помощью задатчика скорости
ЗС. Стрелка указателя
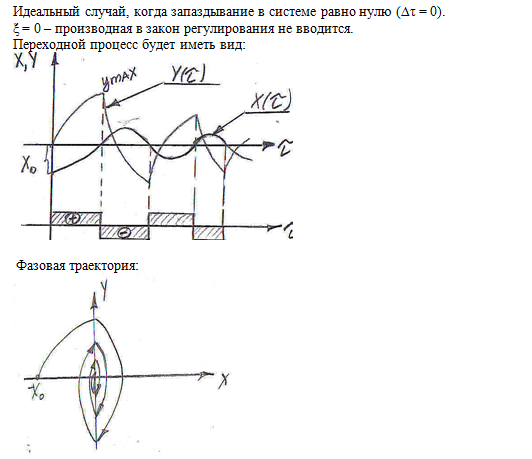
УС-И связана с ротором бесконтактного синусно-косинусного трансформатора (БСКТ). Индекс указателя связан с ротором синусно-косинусного трансформатора (СКТ). Статорные обмотки СКТ и БСКТ соединены между собой. Роторная обмотка СКТ запитана напряжением переменного тока, а с роторной обмотки БСКТ снимается сигнал переменного тока, фаза которого пропорциональна рассогласованию между положением индекса и стрелки. Этот сигнал меняется либо вследствие изменения положения стрелки и как следствие согласованного вращения ротора БСКТ, либо вследствие отработки двигателем следящей системы индекса с одновременной отработкой ротора СКТ. Появление рассогласования по скорости начинает парироваться АТ перемещения РУД. Поначалу будем предполагать, что стабилизация скорости с помощью АТ происходит во время предпосадочного маневра, когда САУН стабилизирует высоту и угол наклона траектории воздействием на руль высоты. Тогда изменения углов атаки и тангажа парируются САУН. В результате изменения тяги двигателей будет изменяться скорость самолета и рассогласование ДУ станет равным нулю. Однако вследствие инерционности двигателей и самолета производная

будет присутствовать. Поэтому самолёт проскочит опорное значение скорости. Это вызовет изменение знака
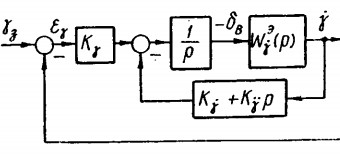
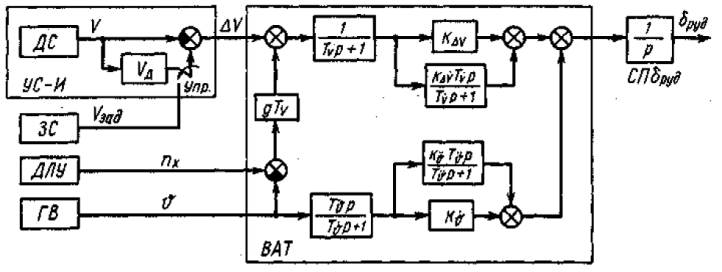
и отработку РУД в обратную сторону. Для демпфирования колебаний самолета по скорости изменяют закон управления АТ

При полете по наклонной траектории, целесообразно в закон управления АТ включить составляющую, пропорциональную

. Однако, как известно, пока на борту ВС отсутствуют датчики такого сигнала. Поэтому используют сигнал

, пропускаемый через изодромный фильтр. С учетом интегрирующего сервопривода этот сигнал необходимо еще раз продифференцировать. Тогда закон управления АТ принимает следующий вид:

 Скачать 1.09 Mb.
Скачать 1.09 Mb.