Основы мехатроники
 Скачать 0.78 Mb. Скачать 0.78 Mb.
|

|
ТЕХНОЛОГИЯ, ОБОРУДОВАН» И АВТОМАТИЗАЦИЯ  ■^ии«риИ«1 ■^ии«риИ«1 ^Л ' <У1 мишии Iрои Iильных Ю. В. ПОДУРАЕВ ОСНОВЫ МЕХАТРОНИКИ  ^  Учебное пособие Учебное пособиеЮ.В. Подураев Основы мехатроники Редактор М.К. Ермолова ЛР №020968 от 09.03.95 Сдано в набор Подписано в печать Формат 60x90/16 Бумага 80 гр/м2 Гарнитура "Тйпез" Объем 6,4 уч.- изд. л. Тираж 300 экз. Заказ № 1236 Издательство "Станкин" 101472, Москва, Вадковкий пер., 3^ ПДЦ № 53-227 от 09.02.96г. Ю.В.ПОДУРАЕВ ОСНОВЫ МЕХАТРОНИКИ Рекомендовано Учебно-методическим объединением по образованию в области автоматизированного машиностроения в качестве учебного пособия для студентов высших учебных заведений, обучающихся по направлениям "Автоматизация и управление" и "Технология, оборудование и автоматизация машиностроительных производств" и специальности "Мехатроника" Москва 2000 \
РАЗДЕЛ 2. ЭЛЕМЕНТЫ МЕХАТРОННЫХ СИСТЕМ
РАЗДЕЛ 3. СОСТОЯНИЕ И ТЕНДЕНЦИИ РАЗВИТИЯ МЕХАТРОНИКИ В МИРЕ.
РАЗДЕЛ 4. СОЦИАЛЬНО-ЭКОНОМИЧЕСКИЕ ПРОБЛЕМЫ МЕХАТРОНИКИ. 4.1. Социальные проблемы внедрения мехатронных систем. 4.2.Экономические проблемы внедрения мехатронных систем. 4.3 .Организационные проблемы предприятия при выпуске мехатронных изделий. 4.4.Производственный менеджмент при проектировании и выпуске мехатронных изделий. 4.5. Вопросы истории мехатроники. ОГЛАВЛЕНИЕ Предисловие 4 ГЛАВА 1. Предпосылки развития мехатроники и области применения мехатронных систем.... 6 ГЛАВА 2. Кошхешшя построения мехатронных систем .\ 13
ГЛАВАЗ. Мехатронные модули движения 26 3.1. Моторы-редукторы 26
ГЛАВА 4. Современные мехатронные системы 48
4.5. Транспортные мехатронные средства 60 ГЛАВА 5. Проблематика и современные методы управления мехатронными модулями и системами. 62 5.1. Особенности постановки задач управления мехатронными системами 62 5.2 .Принципы построения систем интеллектуального управления в мехатронике 69
нейронных сетей 91 Заключение... 97 Список литературы 98 Приложение 101 Примерные темы рефератов по курсу "Основы мехатроники" 101 Указатель английских терминов ЮЗ 102 АО"ЛАПИК", 1998. 37. Прикладные нечеткие системы. Пер. с яп. / Под ред. Т.Тэрано. - М.: Мир, 1993.
"ТАРИС", 1998. 43. Розанов Ю.К., Флоренцев С.Н. Силовая электроника в электроприводе. // Приводная техника, №5,1997. 44. Соломенцев Ю.М., Сосонкин В.Л. Управление гибкими производственными системами. - М.: Машиностроение, 1988. 45. Справочник по промышленной робототехнике. Пер. с англ./ Под ред. ШНофа. - М.: Машиностроение, 1989.
49. Харцбергер С. и др. Мехатронные линейные приводные узлы станков с параллельной кинематикой. // Приводная техника, №5,1998.
// ШЕЕ/А8МЕ Тгапзаспопз оп Меспа»гошс8, уо1.1,12,19%. 54. шзпшпешапоп СаЫо^ие. Капопа1 Ш5(пш1еп($, 118А, 1998. 55.1$егтап К. Моа"ешп§ апё Оеыёп МешоёоЬ^у &г МесЬа1гошс5 8у51етз. // ШЕЕ/А8МЕ Тгапзаспопз оп Меспал-ошсз, уо1.1, Ч, 1996. 56. Куига N.. ОЬо Н. МесЬап-ошсз - Ап ЬошпМ Регереспуе. // ШЕЕ/А8МЕ Тгашасиопз оп Меспа1готс8, уо1.1, Ч, 1996. облегчения работы студентов с иностранными источниками в приложении дается англоязычная специальная терминология. Чтение курса лекций автор сопровождает демонстрацией видеоматериалов по современным мехатронным модулям и системам. Автор попытался осмыслить пройденный исследователями за последние годы путь, систематизировать ключевые идеи и разработки, при этом осознанно отказавшись от изложения многочисленных подробностей и математических аспектов. Мехатроника находится только в стадии становления, поэтому даже ее концептуальные положения являются на сегодняшний день дискуссионными. Однако важно отметить, что на современном этапе мехатроника развивается в первую очередь благодаря техническим достижениям инженеров-практиков, что в свою очередь стимулирует формирование ее фундаментальных научно-теоретических основ. Автор выражает благодарность профБ.СКулешову и доц.Ю.В.Илюхину за советы и рекомендации при обсуждении материалов книги, рецензентам пособия, а также всем коллегам, оказавшим помощь при подготовке рукописи к изданию. Все замечания и предложения по представленному пособию будут с благодарностью приняты и учтены. Просьба направлять свои пожелания по адресу: 101472 Москва, Вадковский пер., 1, издательство «СТАНКИН». Автор 100 СПИСОК ЛИТЕРАТУРЫ 1. Башарин А.В., Новиков В.А., Соколовский ГГ. Управление электроприводами. -Л.: Энергоиздат, 1982. 2. Беленький Ю.М., Гравве В.В., Шебанов А.В. Бесконтактные моментные двигатели серии ДБМ. // Приводная техника, №10,1998. 3. Богачев ЮЛ. Мехатроника - достижения и проблемы. // Приводная техника, №4,1998. 4. Богачев Ю.П., Петриченко В.Н. Мехатронные модули движения - приводы машин нового поколения. // Приводная техника, №1,1997.
Ю.Ермолов И.Л., Подураев Ю.В. Синтез движений технологических роботов с упругими сочленениями и звеньями. Сборник научных трудов конференции "Автоматизированные технологические и мехатронные системы в машиностроении". Уфа, УГАТУ, 1997. 11. Захаров В.Н., Ульянов СВ. Нечеткие модели интеллектуальных промышленных регуляторов и систем управления. // Известия РАН. Техническая кибернетика, №5,1992; №4,1993.
14. Ильинский Н.Ф. Электропривод вчера, сегодня, завтра. // Приводная техника, №6,1997. 15. Илюхин Ю.В., Подураев Ю.В. Проектирование исполнительных систем роботов. - М.: МПИ, 1989. 16. Капица СП., Курдюмов СП., Малинецкий Г.Г. Синергетика и прогнозы будущего.- М.: Наука, 1997. п. Кенио Т., Нагамори С. Двигатели постоянного тока с постоянными магнитами. Пер. с яп. - М.: Энергоатомиздат, 1989. 18. Коренев Г.В. Целенаправленная механика управляемых манипуляторов. - М.: Наука, 1979. * - возможность комплексирования функциональных модулей в сложные мехатронные системы и комплексы под конкретные задачи заказчика. В рамках Государственных научно-технических программ в нашей стране выполнен целый ряд фундаментальных научных исследований, успешных инженерных и производственных разработок по интеграции перечисленных направлений, которые заложили научно-технический потенциал для развития современных мехатронных систем. Созданы серии комплектных электромеханических приводов, встраиваемых в узлы машин. В автоматизированном машиностроении наиболее ярко эта тенденция проявилась в 70-80-х годах при создании промышленных и специальных роботов, станков с числовым программным управлением, обрабатывающих центров, гибких производственных модулей и систем. Объемы мирового производства мехатронных устройств ежегодно увеличиваются, охватывая все новые сферы. Сегодня мехатронные модули и системы находят широкое применение в следующих областях:
- автомобилестроение (например, антиблокировочные системы тормозов, системы стабилизации движения автомобиля и автоматической парковки);
Безусловно, этот список может быть расширен. В целом по данным ведущего периодического журнала по мехатронике [52] в 19% году мировой рынок мехатронных систем составил около 100 миллиардов долларов США, из которых примерно 1/10 приходится на долю робототехники. 98 7 программное обеспечение. В его состав входят следующие специальные программные модули:
человеко-машинный интерфейс и специальный язык программирования движений Виртуального Робота в Виртуальной Среде;
На этапе обучения оператор, наблюдая на дисплее рабочей станции за перемещениями Виртуального Робота в Виртуальной Среде, управляет его движением в возникающих ситуациях. При этом компьютер моделирует работу всех сенсоров информационной системы, что позволяет автоматически формировать так называемые "правила инстинктивного поведения робота". Предпосылкой в этих правилах является набор сенсорных сигналов, а заключением - решения о движении, принятые оператором. Таким образом, в результате многократных опытов, происходит обучение управляющей нейронной сети правильным действиям в возникающих ситуациях. Процесс обучения заканчивается, когда Виртуальный Робот в состоянии без помощи оператора выполнить заданные движения без столкновения с препятствиями. Далее нейроконтроллер, обученный в Виртуальной Среде, устанавливается в систему управления реального робота РКАКК, к ее входам подключаются реальные сенсоры, а выходы НС соединяются с приводами колес. Лабораторные опыты показали, что НС эффективно выполняет управляющие функции в реальной среде. Рассмотренный подход перспективен для трубопроводных мобильных роботов (см.п.4.1) при выполнении ими функциональных движений в автономном режиме. Решению этой задачи посвящен научно-исследовательский проект, выполняемый совместно Де Монтфортским университетом, НПО "ТАРИС" и МГТУ "СТАНКИН" в рамках проекта, поддержанного Королевским Обществом по развитию естественных наук Великобритании (ТЬе Коуа! Зосаегу, ЦК). 96 Историю мехатроники принято отсчитывать с 1969 года, когда японская фирма Уазка\уа Шестпс ввела новый термин "Мехатроника" как комбинацию слов ''Механика" и "Электроника". В 1972 году фирма зарегистрировала этот термин как товарный знак. Первоначально мехатронными системами считались только регулируемые электроприводы. Затем сюда стали относить автоматические двери, торговые автоматы, мобильные средства и фотокамеры с автофокусировкой. В 80-х годах класс мехатронных систем пополнился станками с числовым программным управлением, промышленными роботами и новыми видами бытовых машин (посудомоечных, стиральных и т.п.). В последнее десятилетие очень большое внимание уделяется созданию мехатронных модулей для современных автомобилей, нового поколения технологического оборудования (станков с параллельной кинематикой, роботов с интеллектуальным управлением), микромашин, новейшей компьютерной и офисной техники. В качестве основного классификационного признака в мехатронике представляется целесообразным принять уровень интеграции составляющих элементов. В соответствии с этим признаком можно разделять мехатронные системы по уровням или по поколениям, если рассматривать их появление на рынке наукоемкой продукции исторически. Мехатронные модули первого уровня представляют собой объединение только двух исходных элементов. Типичным примером модуля первого поколения может служить "мотор-редуктор" , где механический редуктор и управляемый двигатель выпускаются как единый функциональный элемент. Мехатронные системы на основе этих модулей нашли широкое применение при создании различных средств комплексной автоматизации производства (конвейеров, транспортеров, поворотных столов, вспомогательных манипуляторов). Мехатронные модули второго уровня появились в 80-х годах в связи с развитием новых электронных технологий, которые позволили создать миниатюрные датчики и электронные блоки для обработки их сигналов. Объединение приводных модулей с указанными элементами привела к появлению мехатронных модулей движения, состав которых полностью соответствует введенному выше определению, когда достигнута интеграция трех устройств различной физической природы: механических, электротехнических и электронных. На базе мехатронных модулей данного класса созданы управляемые энергетические машины (турбины и генераторы), станки и промышленные роботы с числовым программным управлением. Развитие третьего поколения мехатронных систем обусловлено появлением на рынке сравнительно недорогих микропроцессоров и контроллеров на их базе и направлено на интеллектуализацию всех 9
- технические и методические проблемы с постановкой и проведением экспериментальных исследований на реальных объектах для идентификации параметров математической модели с необходимой точностью. 5.6.2. Применение нейронных сетей для управления мехатронными системами Нейронная сеть (НС) как универсальное средство решения задач планирования и управления движением может быть использована на всех иерархических уровнях мехатронной системы (см. рис.5.4). Нейроконтроллеры позволяют управлять движением машины на базе накопленных знаний. Известен целый ряд разработок регуляторов исполнительного уровня на базе НС для управления движением мехатронных модулей. В таких нейро-контроллерах (рис.5.15) на вход поступает информация о переменных состояния системы (механического устройства, двигателей, силовых преобразователей), действующих обобщенных силах и моментах, а также векторы задающих и возмущающих воздействий. У(1). гХО- «(О, Нейроконтроллер исполнительного уровня У(1) - вектор состояний системы С(1) - вектор управляющих воздействий Р(х) - вектор возмущающих воздействий Рис. 5.15. Схема нейроконтроллера. выходит первый выпуск журнала ШЕЕ/А8МЕ Тгашсйопз оп МесЬап-ошсв, который издается Институтом инженеров по электротехнике и электронике совместно с Американским обществом инженеров-механиков. В 1996-98 годах появляется целый ряд статей по мехатронике в отечественных журналах ( "Приводная техника", СТИН и других),а также в научно-технических сборниках. Направление "Мехатронные технологии" выделено Министерством науки и технологий РФ на 1999-2000 годы как критическое в рамках Федеральной программы "Технологии, машины и производства будущего". Ежегодно в мире проводится несколько специализированных научно-технических конференций в области мехатроники. По мере расширения области применения мехатронных систем и расширения международных научно-технических связей, становится все более значимым активный обмен новых производственными и информационными технологиями между их создателями и пользователями, между различными группами потребителей и разработчиков (научно-исследовательскими центрами, предприятиями различных форм собственности, университетами). Указанные формы кооперации реализуются в рамках международного трансфера технологий. В МГТУ «СТАНКИН» функционирует Центр Трансфера Технологий, который ведет ряд международных проектов в рамках Европейской научно-информационной сети АМЕТМАЗ-МоЕ и программы ШСО -СОРЕКМСШ с партнерами из Греции, Великобритании, Венгрии, Болгарии и других стран. Развитие мехатроники как междисциплинарной научно-технической области помимо очевидных технико-технологических сложностей ставит и целый ряд новых организационно-экономических проблем. Современные предприятия, приступающие к разработке и выпуску мехатронных изделий, должны решить в этом плане следующие основные задачи: структурная интеграция подразделений механического, электронного и информационного профилей (которые, как правило функционировали автономно и разобщенно) в единые проектные и производственные коллективы; подготовка "мехатронно-ориентированных" инженеров и менеджеров, способных к системной интеграции и руководству работой узкопрофильных специалистов различной квалификации; - интеграция информационных технологий из различных научно-технических областей (механика, электроника, компьютерное управление) в единый инструментарий для компьютерной поддержки мехатронных задач; стандартизация и унификация всех используемых элементов и процессов при проектировании и производстве мехатронных систем. 94 11 синапсы дендриты с 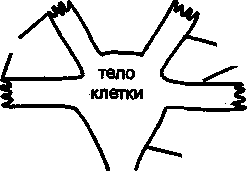 игналов входит в нейрон через его окончания (синапсы), которых может быть до 1000 на одном дендрите (ответвлении). Через дендрита информация поступает в тело клетки, где происходит ее обработка и оценка. Результат этой логической оценки (1 или 0) по аксону (стволу клетки) передается далее вниз, где информация расходится по корням нейронных структур следующего уровня. Каждый нейрон имеет связь приблизительно с 104 других нейронов. Нервные импульсы передаются как потоки химически активных заряженных веществ (ионов). игналов входит в нейрон через его окончания (синапсы), которых может быть до 1000 на одном дендрите (ответвлении). Через дендрита информация поступает в тело клетки, где происходит ее обработка и оценка. Результат этой логической оценки (1 или 0) по аксону (стволу клетки) передается далее вниз, где информация расходится по корням нейронных структур следующего уровня. Каждый нейрон имеет связь приблизительно с 104 других нейронов. Нервные импульсы передаются как потоки химически активных заряженных веществ (ионов).аксон (ствол) Рис. 5.12. Биологический нейрон. Математическая модель единичного нейрона строится на основе следующей схемы (рис.5.13). Входные сигналы поступают на сумматор, где определяется их взвешенная сумма ( с учетом весовых коэффициентов): с У м м А т о р и=к1-х1+щ-х2+-+-м>н-хн. о д ы Рис. 5.13. Математическая модель нейрона. Выходной сигнал нейрона формируется на выходе нелинейного блока. При реализации нелинейного блока { обычно используются пороговые и экспоненциальные функции. |
