автматика. 1. Описание принципа действия выбранной конструкции следящей системы автоматического регулирования сар 5
 Скачать 0.81 Mb. Скачать 0.81 Mb.
|

7.7. Построение кривой переходного процесса исходной системыКривую переходного процесса строят по формуле:  . .Характеристика представлена на рисунке 7.7.1: 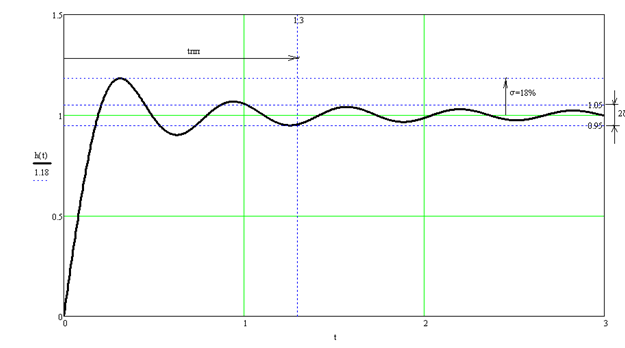 Рисунок 7.7.1 - Кривая переходного процесса исходной САР Определение качественных показателей по кривой переходного процесса: Время переходного процесса – время от момента подачи воздействия на систему до окончания момента переходного процесса. Переходный процесс считается закончившимся, если отклонение регулируемого параметра от заданного значения не больше 3-5 %. В данном случае время переходного процесса будет равно:  . .Перерегулирование – относительная величина максимального отклонения регулируемой величины от установившегося значения:  . .Статическая ошибка:  . .а) Время переходного процесса  б) Перерегулирование  ; ;в) Количество колебаний n = 2. Анализ переходного процесса исходной САР показывает, что время переходного процесса составляет 1,3 с, что превышает заданные 0,8 с, при этом система сделает 2 колебания, что является хорошей характеристикой. Перерегулирование в исходной системе составляет 18%, что является приемлемой величиной, так как исходя из задания перерегулирование в системе не должно превышать 20%. Система не удовлетворяет требованию параметра времени переходного процесса, следовательно, необходима корректировка качества исходной САР. 8. Корректировка качества исходной работы САР. Построение желаемой ЛАЧХ и ЛФЧХ.Корректировку качества работы САР будем производить с помощью ЛАЧХ разомкнутой системы. Для построения желаемой ЛАЧХ разомкнутой системы (ЖЛАЧХ) найдем несколько характерных точек, через которые она должна проходить. Рабочая точка. Рабочая частота – это максимальная частота входного синусоидального сигнала, при котором динамическая ошибка системы ещё не должна быть больше заданной. Рабочая частота:  где max – максимальная частота вращения объекта; max – его максимальное угловое ускорение. Амплитуда этого входного сигнала определяется по формуле:  По заданию допустимая ошибка в установившемся режиме:  Чтобы система обеспечивала заданную точность, необходимо соблюдение условия:  , ,т.е. ЖЛАЧХ должна проходить через (или) над точкой с координатами  Следовательно, Следовательно, Координаты рабочей точки Ар(1,2; 23,47). Анализируя положение рабочей точки, находим, что исходная система не удовлетворяет требованиям по качеству работы САР, так как она располагается выше исходной ЛАЧХ. Построение желаемой ЛАЧХ и ЛФЧХ На частоте среза ЖЛАЧХ пересекает горизонтальную ось. Чтобы система была устойчивой, необходимо, чтобы это пересечение осуществлялось участком ЛАЧХ с наклоном –20дБ/дек. Частоту среза найдем, исходя из заданного времени переходного процесса tp=0,8 c:  где  – коэффициент, находимый из номограммы Солодовникова (рис.8.1.1) по допустимому перерегулированию – коэффициент, находимый из номограммы Солодовникова (рис.8.1.1) по допустимому перерегулированию  ( ( – необходимый запас по фазе). – необходимый запас по фазе).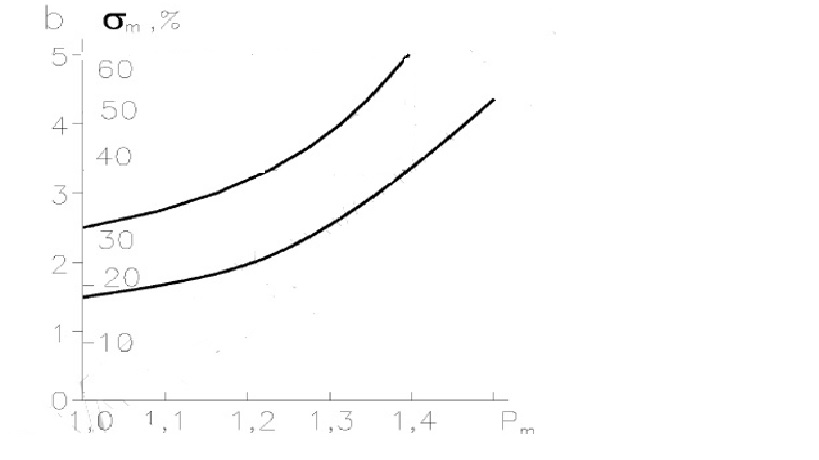 Рисунок 8.1.1- Номограмма Солодовникова Номограмма Солодовникова (рисунок 8.1.1) и пример определения по ней коэффициента b при  По номограмме  . .Окончательно  Частоты начала и конца среднечастотного участка ЖЛАЧХ определим по уравнениям:   Значение коэффициента  найдём по формуле: найдём по формуле: Примем  При построении ЛАЧХ (ЛФЧХ) необходимо следовать нескольким правилам: наклон в среднечастотной области должен составлять –20дБ/дек частоты границ среднечастотной области и частоты среза должны соответствовать соотношения  в низкочастотной области наклон ЖЛАЧХ должен составлять–20дБ/дек. в высокочастотной области ЖЛАЧХ должна быть параллельна исходной ЛАЧХ. должны быть обеспечены запасы устойчивости по амплитуде и по фазе. перерегулирование в желаемой системе не должно превышать 20%. система должна приходить в равновесие после снятия нагрузки в течении времени 0,8 с, совершив не более 3-ёх колебаний. Проводим через ωс прямую наклоном – 20дБ/дек до пересечения с асимптотами ω2 и ω3. Для улучшения качественных параметров примем ω3=2000 Гц. Высокочастотный участок ЖЛАЧХ проводят параллельно высокочастотному участку ЛАЧХ исходной САР. Сопряжение высоко- и среднечастотного участков ЖЛАЧХ осуществим при помощи участка с наклоном –60дБ /дек. Сопряжение низко- и среднечастотного участков ЖЛАЧХ осуществим при помощи участка с наклоном –40дБ /дек. Точка пересечения ω1 низкочастотного участка с сопрягающим участком определяется путём математических преобразований ω1 = 1,3 Гц. Постоянные времени скорректированной САР:    По ЖЛАЧХ определим передаточную функцию скорректированной разомкнутой САР:   (8.1) (8.1)Передаточная функция скорректированной САР, замкнутой единичной обратной связью имеет вид:  (8.2) (8.2) . .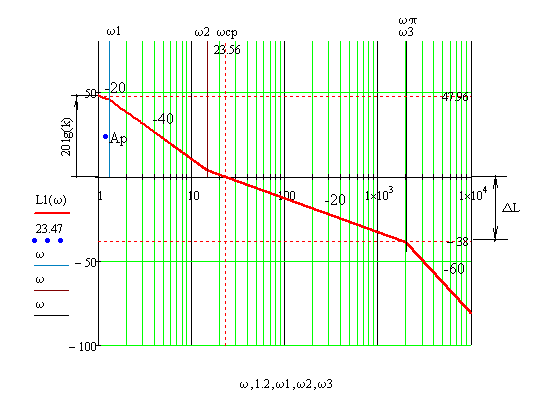 Рисунок 8.1.2 – Желаемая ЛАЧХ 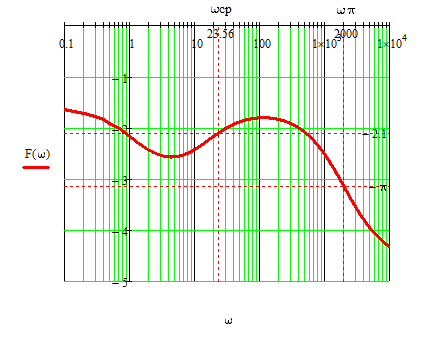 Рисунок 8.1.3 – Желаемая ЛФЧХ Запас по фазе равен: ∆Φ=  Запас по амплитуде равен ∆L=38 дБ/дек; Как видно из графика, что на частоте ωп=2000, на которой ЛФЧХ пересекает прямую –π находится, ордината ЛАЧХ отрицательна, следственно САР устойчива. |