автматика. 1. Описание принципа действия выбранной конструкции следящей системы автоматического регулирования сар 5
 Скачать 0.81 Mb. Скачать 0.81 Mb.
|

9. Определение области устойчивости расчетной САР по коэффициенту усиленияВ качестве метода нахождения границ устойчивости будем использовать метод Д-разбиения. Для замкнутой системы (8.2) передаточная функция:  Характеристическое уравнение замкнутой скорректированной системы.  Приравняем Д(р) к нулю, и выразим kУ:  Запишем выражение для коэффициента усиления в комплексном виде:  В общем виде получим следующее выражение: Выразив вещественную и мнимую части, строим зависимость вида:  Изменяя частоту от нуля до бесконечности, получим кривую на комплексной плоскости. Полученную кривую отобразим симметрично относительно действительной оси. Полученные две ветви образуют кривую D-разбиения. Двигаясь вдоль кривой D-разбиения из точки, симметричной точке, соответствующей бесконечной частоте, нанесем штриховку слева от кривой. Области, в которых штриховка обращена внутрь, являются потенциальными областями устойчивости. Для проверки устойчивости в любой из этих областей необходимо проверить устойчивость для любого значения коэффициента усиления, принадлежащего отрезку вещественной оси, заключенному внутри области. Нанесём штриховку с левой стороны, двигаясь по кривой от - до +. 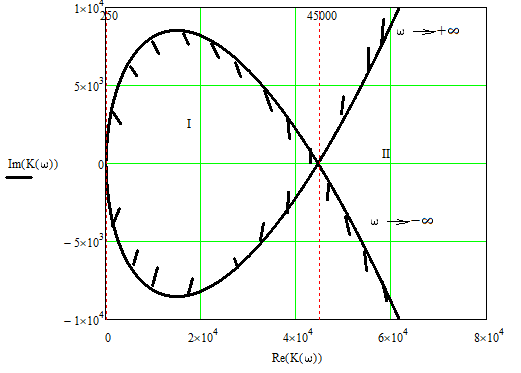 Рисунок 9.1.1 – Д-разбиение Предполагаемой областью устойчивости является область, где штриховка обращена внутрь, следовательно, областью устойчивости является область I. Построение кривой D-разбиения показывает, что максимальный коэффициент усиления, при котором система устойчива:  Расчёт последовательных и встречно-параллельных корректирующих звеньев аналитическим методом и по ЛАЧХ Для выбора способа коррекции системы изобразим ЛАЧХ исходной системы и ЖЛАЧХ в одних координатах. 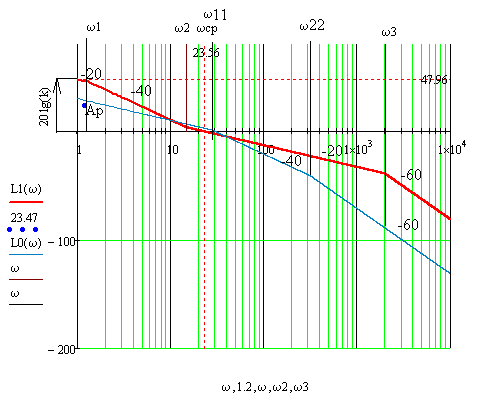 Рисунок 10.1.1 – ЖЛАЧХ и исходная ЛАЧХ в одних координатах Увеличим коэффициент передачи исходной САР до совпадения низкочастотных участков желаемой ЛАЧХ и исходной. Это означает, что увеличиваем его до значения 250. 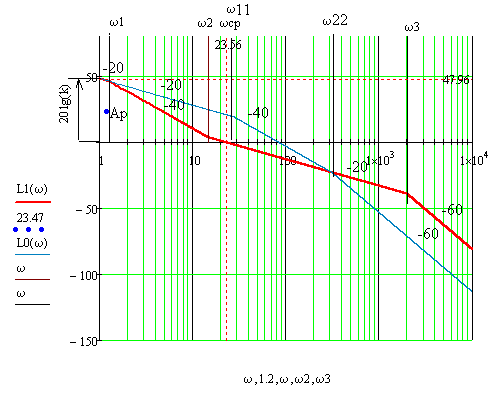 Рисунок 10.1.2 – Совмещение низкочастотных участков Первое корректирующее звено включим в местную обратную ОС с Двигателем для увеличения его постоянной времени с 0,036 до 0,769. Это приведёт к тому, что перегиб с –20дБ/дек до –40дБ/дек будет происходить на частоте  = 1.3 Гц, а не на частоте 27.77 Гц. = 1.3 Гц, а не на частоте 27.77 Гц.Передаточная функция двигателя (3.6): Передаточная функция двигателя:  Обозначим через Z(p) передаточную функцию ОС. Тогда:  Приравняем  к требуемой функции к требуемой функции и выразим Z(p): и выразим Z(p):   Для реализации этого звена необходимо учесть, что у двигателя выходной величиной является угол поворота вала, а входной – электрическое напряжение. Поэтому на выходной вал необходимо установить тахогенератор постоянного тока. Напряжение на его обмотках будет пропорционально угловой скорости, т.е. его передаточная функция:  . .Выберем тахогенератор с крутизной характеристики кТГ =0,1  Последовательно тахогенератору необходимо включить дифференцирующее звено на операционном усилителе, на вход которого включен конденсатор. Это будет соответствовать звену ОС с передаточной функцией:  . .Найдём параметр  этого звена. Передаточная функция всей ОС: Z(p) = -0,136p2, тахогенератора: этого звена. Передаточная функция всей ОС: Z(p) = -0,136p2, тахогенератора:  . Поэтому Т = 0,136/0,1 = 1,36 с-1. . Поэтому Т = 0,136/0,1 = 1,36 с-1.Схема корректирующего звена показана ниже: 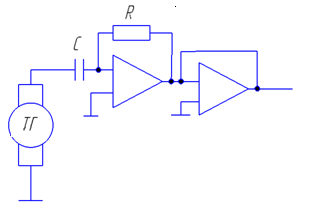 Рисунок 10.1.3 – Схема корректирующего звена В качестве активных элементов для синтеза корректирующего устройства (КУ) используем операционные усилители (ОУ), обладающие большим входным сопротивлением (десятки МОм) и низким входным (доли Ома), ОУ дают возможность путем включения во входной цепи и цепи ОС пассивных RC – элементов получить различные передаточные функции. При высоком коэффициенте усиления (ky) и глубокой отрицательной ОС, охватывающей усилитель, передаточная функция будет зависеть только от параметров элементов ОС и входной цепи. Постоянная времени цепи: Т=RC Полагая R=100кОм, найдем С:  График ЛАЧХ тогда будет выглядеть следующим образом: 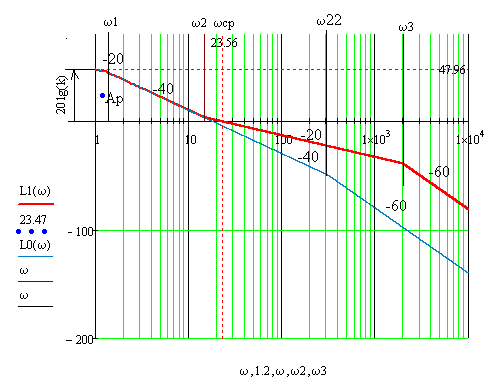 Рисунок 10.1.4 – ЛАЧХ системы после введения первого корректирующего звена Для корректировки усилителя воспользуемся местной ОС для уменьшения ее постоянной времени с 0,0032 до 0,0005. Это приведет к тому, что перегиб среднечастотного участка ЛАЧХ будет происходить на частоте  , а не на частоте 312,5 Гц. , а не на частоте 312,5 Гц.В качестве звена примем пропорциональное звено с неизвестным пока коэффициентом усиления koc. Для его расчета запишем передаточную функцию звена, охваченной местной ОС.  Таким образом новое значение параметра  будет равно: будет равно: Приравняв его к требуемому найдем koc:  Тогда новый коэффициент усиления с ОС будет равен:  Новая передаточная функция скорректированного усилителя:  График ЛАЧХ будет выглядеть следующим образом: 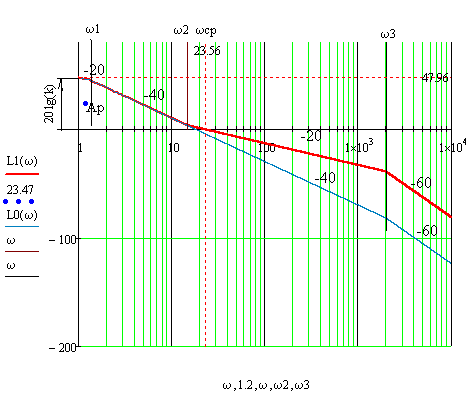 Рисунок 10.1.5 – ЛАЧХ системы после введения второго корректирующего звена Реализуем ОС усилителя с помощью звена на основе операционного усилителя представленного на рисунке 10.1.6 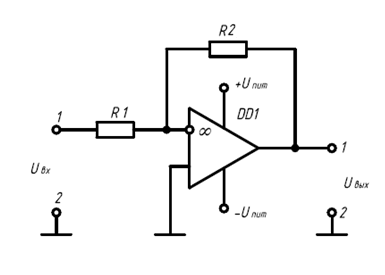 Рисунок 10.1.6 – принципиальная схема звена ОС усилителя Коэффициент усиления звена:  Зададим значение  , ,Тогда  Остальную коррекцию выполним с помощью последовательного корректирующего звена. С учетом произведенной коррекции разомкнутая система будет иметь следующую передаточную функцию:  Передаточная функция желаемой ЛАЧХ (8.1):  Корректирующее звено будем определять по формуле:   . . 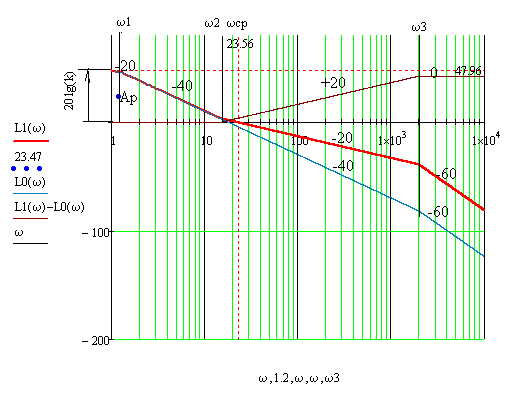 Рисунок 10.8 – Кривая последовательного корректирующего звена Такое корректирующее звено можно реализовать с помощью типовой интегро-дифференцирующей RC-цепи (представленной на рисунке 10.1.7) с передаточной функцией вида:  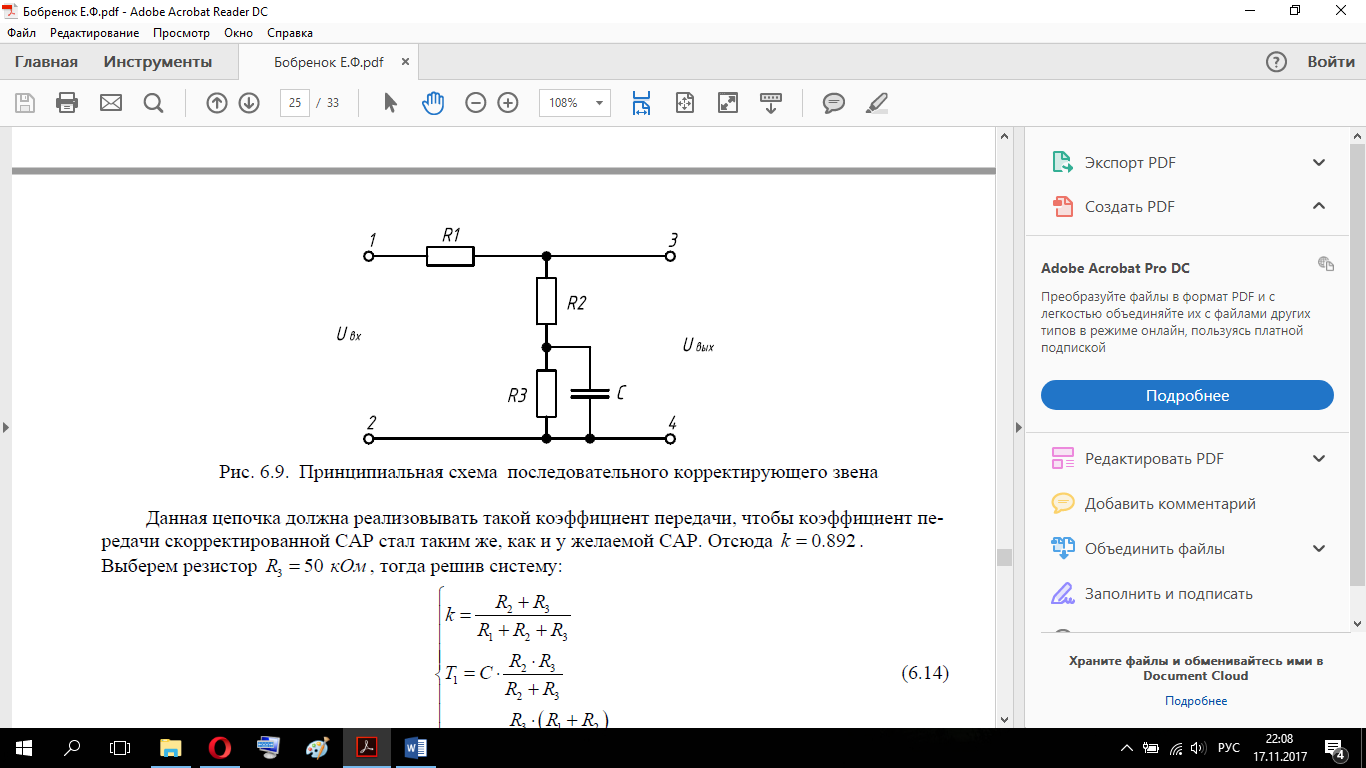 Рисунок 10.1.7 – Корректирующее звено Данная цепочка должна реализовать такой коэффициент передачи, чтобы коэффициент передачи скорректированной САР стал таким же, как и у желаемой. Отсюда к=40.38. Выберем резистор R3=1 кОм, R2=1,5кОм. Решим систему уравнений:  Получим R1=31 кОм, С=278 мкФ Структурная схема скорректированной САР выглядит следующим образом: 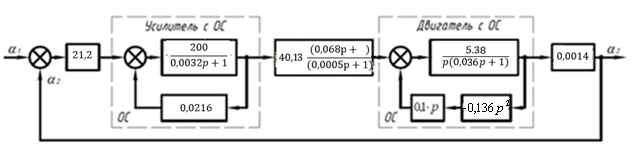 Рисунок 10.1.9 – Структурная схема скорректированной САР |