автматика. 1. Описание принципа действия выбранной конструкции следящей системы автоматического регулирования сар 5
 Скачать 0.81 Mb. Скачать 0.81 Mb.
|

1. Описание принципа действия выбранной конструкции следящей системы автоматического регулирования САРФункциональная схема исходной САР представлена на рисунке 1.1.  Рисунок 1.1 – Функциональная схема исходной САР Система, показанная на рисунке 1.2, предназначена для управления на расстоянии различными механизмами и применяется тогда, когда для поворота исполнительной оси требуется значительная мощность, либо когда требования к точности воспроизведения угла весьма высоки. На схеме (рисунок 1.2) φ1 и φ2-углы поворота командного и исполнительного вала, ошибка рассогласования φ=φ1-φ2, РМ-рабочий механизм, Р-редуктор, М-электродвигатель. При повороте командного вала (задающий) (СКВТ-1) на входе усилителя появляется напряжение (U), пропорциональное углу рассогласования. От разности угловых положений задающего и исполнительного валов зависит управляющий сигнал, подаваемый на усилитель. Усилитель управляет работой исполнительного электродвигателя (М), выходной вал которого через редуктор (Р) связан с рабочим механизмом (РМ) и валом СКВТ-2 (исполнительный). Электродвигатель (М), через редуктор (Р) перемещает рабочий механизм (РМ) и одновременно исполнительный вал СКВТ-2 в направлении уменьшения ошибки рассогласования (φ=φ1-φ2). В момент, когда рабочий механизм (РМ) достигнет согласованного положения (φ1=φ2) напряжение управления (U2) становится равным нулю и двигатель останавливается. Основная задача этой системы - согласование вращения двух валов, механически между собой не связанных. Поэтому в качестве системы автоматического регулирования выберем систему поворота спутниковой антенны. 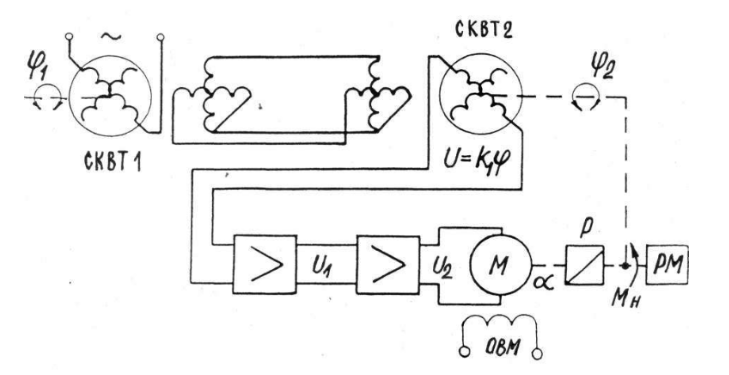 Рисунок 1.2 – схема САР 2. Выбор основных функциональных элементов системы 2.1. Выбор исполнительного двигателя с редукторомИсполнительным двигателем (ИД) называется устройство, предназначенное для перемещения объект регулирования (ОР) в соответствии с заданным законом регулирования. (ИД) работает в сложных динамических режимах слежения за сигналом рассогласования. Отсюда вытекают специфические требования к этим устройствам: обеспечение необходимых выходных усилий во всех режимах работы и способность выдерживать кратковременные перегрузки, возникающие в приводе; обеспечение высоких скоростей и ускорений по перемещению ОР. Плавное регулирование в широких пределах и обеспечение независимости частоты вращения от изменения нагрузки, отсутствие «самохода», малая инерционность и способность работать в определённых температурных диапазонах без перегрева. Кроме перечисленных к ИД предъявляют общетехнические требования: малые масса и размеры, высокая надёжность при механических и климатических воздействиях. Для выбора ИД определим мощность, необходимую для перемещения нагрузки с требуемой скоростью и ускорением:  где  – момент инерции нагрузки; – момент инерции нагрузки;  – момент статической нагрузки; – момент статической нагрузки;  – максимальная частота вращения объекта. – максимальная частота вращения объекта.Выберем двигатель с ближайшей большей мощностью к найденной требуемой. Выбираем двигатель постоянного тока. Выбираем двигатель МИ – 22 с номинальной мощностью 0,37 кВт. По данным, взятым из [1] определяем технические характеристики двигателя
Определим оптимальное передаточное отношение:  Проверим подходит ли выбранный двигатель по скорости:   Так как  , то выбранный двигатель по скорости подходит. , то выбранный двигатель по скорости подходит.Найдем значение требуемого момента вращения двигателя и сравним со значением двигателя:  Проверка выбранного двигателя на перегрузку:   Отношение показывает, что выбранный двигатель удовлетворяет требованию по мощности. Приведенный к валу двигателя статический момент нагрузки:   Сравнение показывает, что 0,64  , следовательно двигатель выбран правильно. , следовательно двигатель выбран правильно.Делаем вывод, что двигатель МИ – 22 выбран правильно, так как он удовлетворяет условию обеспечения требуемых скорости и ускорения. С целью обеспечения необходимой частоты вращения и выходного момента на валу для выходного звена в САР включают редуктор. 2.2 Выбор усилителя мощности В контуре регулирования усилитель относится к изменяемой части, так как его выбирают на основе уже известных характеристик чувствительных и исполнительных элементов из условия обеспечения заданной точности системы. Поскольку общий коэффициент усиления разомкнутой системы обычно невелик, то для получения заданной добротности коэффициент передачи усилителя по напряжению должен быть высоким. Кроме того, для обеспечения требуемой мощности управления (ИД) усилитель должен обладать высоким коэффициентом усиления по мощности. Помимо простого усиления сигнала рассогласования усилитель современных САР дополнительно решает следующие задачи: формирование сигнала управления путём сложения сигнала рассогласования с корректирующими сигналами или путём непосредственного преобразования (интегрирования или дифференцирования) сигнала рассогласования. Преобразования рода тока сигнала; ослабление и подавление помех, поступающих на вход усилителя; ограничение сигналов на входе для защиты элементов усилителя, а на выходе – для ограничения максимальной скорости движения ОР. Усилительные устройства САР должны отвечать техническим требованиям по линейности статических характеристик, входному сопротивлению, зоне нечувствительности, стабильности нуля, линейности суммирования входных сигналов и безынерционности. Выбор усилителя и его структуры зависит от назначения и условия работы проектируемой САР, типа источника входного сигнала и (ИД), качественных показателей и эксплуатационных требований. Но определяющим фактором при выборе усилителя является тип (ИД), его мощность и режим работы. Так как выбранный ранее двигатель МИ –22 имеет мощность менее 1кВт, то для реализации данных условий выбираем тиристорный усилитель с широкоимпульсным управлением с предварительным коэффициентом усиления  . .Постоянная времени тиристорного преобразователя:  где f – промышленная частота 50 Гц  |
 10-4 кгм2
10-4 кгм2