автматика. 1. Описание принципа действия выбранной конструкции следящей системы автоматического регулирования сар 5
 Скачать 0.81 Mb. Скачать 0.81 Mb.
|

2.3. Выбор датчика рассогласованияДля определения ошибки, возникающей при работе САР, используют сравнивающий элемент. Подавая сигнал к входу, преобразовывая его в удобную форму, он сравнивает его с входным воздействием, определяя ошибку работы САР. Для выбора подходящей пары вращающихся трансформаторов определим наибольшую статическую ошибку измерительного элемента .   Выберем в качестве измерителя рассогласования пару вращающихся трансформаторов типа СКВТ ВТДП-П КФ3.031.048, для которых погрешность составляет 1’(1-ый класс), напряжение питания – Uп=40 В, коэффициент трансформации – Кт=0,530.[1] Наибольшая статическая ошибка -  . Суммарная ошибка - . Суммарная ошибка -  . Минимальное значение передаточного числа редуктора между редукторами канала грубого и точного отсчета составляет - . Минимальное значение передаточного числа редуктора между редукторами канала грубого и точного отсчета составляет -  . Принимаем . Принимаем  , тогда статическая ошибка измерительного элемента точного отсчета, приведенная к валу нагрузки следящего привода составит , тогда статическая ошибка измерительного элемента точного отсчета, приведенная к валу нагрузки следящего привода составит  3. Определение статических и динамических математических моделей элементов следящей системы3.1 Расчет исполнительного двигателя с редукторомОпределим передаточную функцию двигателя МИ-22, выбранного ранее. Рассчитаем следующие коэффициенты: Коэффициент противо-ЭДС:  Коэффициент момента:  Полный момент инерции нагрузки:  Механическая постоянная времени:  Коэффициент передачи двигателя по скорости:  Передаточная функция двигателя:  Для редуктора передаточная функция обратно пропорциональна оптимальному передаточному отношению для двигателя:  3.2 Расчет сравнивающего устройстваПара вращающихся трансформаторов, выбранная ранее, типа СКВТ ВТДП-П КФ3.031.048, для которых погрешность составляет 1’(1-ый класс), напряжение питания – Uп=40 В, коэффициент трансформации – Кт=0,530. Передаточная функция для данного типа устройств следующая:  3.3 Расчет усилителя мощностиДля реализации данных условий был выбран тиристорный усилитель с широкоимпульсным управлением с предварительным коэффициентом усиления  и постоянной времени Т=0,0032 с и постоянной времени Т=0,0032 сУсилитель представляет собой апериодическое звено первого порядка с передаточной функцией:  4. Структурная схема САР и ее статический расчетОбщая передаточная функция для исходной САР будет являться произведением передаточных функций составляющих звеньев:    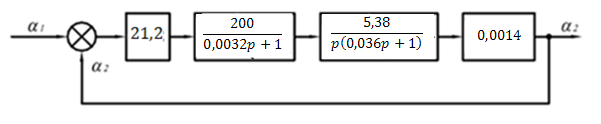 Рисунок 4.1. – Структурная схема исходной САР 5.Определение передаточной функции исходной САРОбщая передаточная функция разомкнутой исходной САР будет являться произведением передаточных функций составляющих звеньев:   Так как соединение в замкнутой САР встречно-параллельное, то ее передаточная функция найдется из разомкнутой как:   Чтобы перейти из операторной формы записи в частотную надо вместо  в уравнения для разомкнутой (5.1) и замкнутой (5.2) систем подставить в уравнения для разомкнутой (5.1) и замкнутой (5.2) систем подставить  . Тогда частотные передаточные функции будут иметь вид: . Тогда частотные передаточные функции будут иметь вид:   Проведем проверку, образуют ли усилитель мощности и двигатель колебательное звено. Запишем передаточную функцию исходной САР (5.1) в виде:   t1=0,000115 – коэффициент при p2 ; t2=0,0252 – коэффициент при p.  Так как условие  не выполняется, то звено не является колебательным. не выполняется, то звено не является колебательным. |