Кинематика точки. Кинематика точки
 Скачать 0.65 Mb. Скачать 0.65 Mb.
|

|
Кинематика точки Кинематика, как специальный раздел теоретической механики, возникла позднее статики и динамики, а именно, в начале второй половины XIX в. Появление первых исследований по кинематике связано с изобретением огнестрельного оружия. В первую очередь внимание исследователей привлекали вопросы определения траектории полета снаряда, уточнение понятий о неравномерном и криволинейном движении точки. Леонардо да Винчи (1452—1519) первый экспериментально изучал вопрос о свободном вертикальном падении тяжелого тела. Однако лишь благодаря трудам Г. Галилея (1564—1642) развитие механики тесно связывается с запросами техники того времени. Галилею принадлежит введение понятия об ускорении и доказательство того, что траекторией движения снаряда, брошенного в пустоте под некоторым углом к горизонту, является парабола. Законы, найденные Галилеем, были развиты в исследованиях Э. Торричелли (1608—1647), установившем формулу пропорциональности скорости падения тела корню квадратному из высоты падения. Обобщение понятия ускорения на случай криволинейного движения было получено X. Гюйгенсом (1629—1695), который первым обратил внимание на возможность разложения ускорения при криволинейном движении на касательное и нормальное. Однако строгое доказательство этого было дано Л. Эйлером (1707—1783). Кинематические законы движения планет были установлены И. Кеплером (1571—1630). Эти законы легли в основу закона всемирного тяготения, открытого Ньютоном. Л. Эйлеру принадлежат основополагающие исследования по кинематике точки в случае естественного способа задания движения, по кинематике вращательного движения твердого тела вокруг неподвижной точки. Он создал широко применяемый метод кинематического описания движения твердого тела с помощью трех углов, называемых углами Эйлера. Развитие кинематики системы обязано трудам Ж. Лагранжа (1736-1813). Однако только бурный рост машиностроения в XIX в. повлек за собой расцвет кинематики как науки. По предложению Ж. Ампера в 1851 г. кинематика выделилась в особый раздел теоретической механики. Появляется ряд глубоких исследований по кинематике твердого тела французских ученых М. Шаля (1793—1886), Л. Пуансо, Г. Кориолиса (1792—1843). П. Л. Чебышев (1821—1894) создал в России научную школу по кинематике механизмов. Богатое научное наследие по кинематике механизмов Чебышева разрабатывается советскими учеными, среди которых, в первую очередь, следует отметить Н. И. Мерцалова (1860—1948), И. И. Артоболевского, А. П. Котельникова (1865—1940), Д. С. Зернова, Л. В. Асура (1878—1920), Я. Л. Геронимуса и др. «Отцу русской авиации» Н. Е. Жуковскому (1847—1921) принадлежат первоклассные работы по теоретической механике, в том числе и по кинематике, в которых широко внедрены геометрические методы доказательств различных теорем. Ряд замечательных исследований по кинематике принадлежит профессору Одесского университета В. Н. Лигнину (1846—1900), возглавлявшему на Украине научное направление исследований по кинематике. Кинематика точки. Введение в кинематику. Кинематикой (от греческого «кинема» — движение) называется раздел механики, в котором изучаются геометрические свойства движения тел без учета их инертности (массы) и действующих на них сил. В кинематике изучают зависимости между пространственно-временными характеристиками механического движения. Поэтому кинематику называют также геометрией движения. Основной задачей кинематики является нахождение положения тела в любой момент времени, если известны его положение, скорость и ускорение в начальный момент времени. Обычно кинематику подразделяют на две части — кинематику точки и кинематику твердого тела. Механическое движение - это изменение положения тел (или частей тела) относительно друг друга в пространстве с течением времени. Для определения положения движущегося тела (или точки) в разные моменты времени с телом, по отношению к которому изучается движение, жестко связывают какую-нибудь систему координат, образующую вместе с этим телом систему отсчета. Тело отсчета - тело (или группа тел), принимаемое в данном случае за неподвижное, относительно которого рассматривается движение других тел. Система отсчета - это система координат, связанная с телом отсчета, и выбранный способ измерения времени (рис. 1).  Рис.1 Изображать систему отсчета будем в виде трех координатных осей (не показывая тело, с которым они связаны). Движение тел совершается в пространстве с течением времени. Пространство в механике мы рассматриваем, как трехмерное евклидово пространство. Время является скалярной, непрерывно изменяющейся величиной. В задачах кинематики время t принимают за независимое переменное (аргумент). Все другие переменные величины (расстояния, скорости и т. д.) рассматриваются как изменяющиеся с течением времени, т.е. как функции времени t. В теоретической механике при измерении пространства за основную единицу длины принимают метр (м), а за основную единицу времени — секунду (с). Время предполагается одинаковым в любых системах отсчета (системах координат) и не зависимым от движения этих систем относительно друг друга. Время обозначается буквой и рассматривается как непрерывно изменяющаяся величина, принимаемая в качестве аргумента. При измерении времени в кинематике различают такие понятия, как промежуток времени, момент времени, начальный момент времени. Промежутком времени называется время, протекающее между двумя физическими явлениями. Моментом времени называют границу между двумя смежными промежутками времени. Начальным моментом называется время, с которого начинают отсчет времени. Для решения задач кинематики надо, чтобы изучаемое движение было как-то задано (описано). Кинематически задать движение или закон движения тела (точки) - значит задать положение этого тела (точки) относительно данной системы отсчета в любой момент времени. Основная задача кинематики точки и твердого тела состоит в том, чтобы, зная закон движения точки (тела), установить методы определения всех кинематических величин, характеризующих данное движение. Положение тела можно определить с помощью радиус-вектора или с помощью координат. Радиус-вектор точки М - направленный отрезок прямой, соединяющий начало отсчета О с точкой М (рис. 2). Координата х точки М - это проекция конца радиуса-вектора точки М на ось Ох. Обычно пользуются прямоугольной системой координат Декарта. В этом случае положение точки М на линии, плоскости и в пространстве определяют соответственно одним (х), двумя (х, у) и тремя (х, у, z) числами - координатами (рис. 2.1).  Рис.2 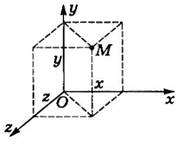 Рис.2.1 Материальная точка - тело, размерами которого в данных условиях можно пренебречь. Этой моделью пользуются в тех случаях, когда линейные размеры рассматриваемых тел много меньше всех прочих расстояний в данной задаче или когда тело движется поступательно. Основной задачей кинематики точки является изучение законов движения точки. Зависимость между произвольными положениями движущейся точки в пространстве и времени определяет закон ее движения. Закон движения точки считают известным, если можно определить положение точки в пространстве в произвольный момент времени. Положение точки рассматривается по отношению к выбранной системе координат. Поступательным называется движение тела, при котором прямая, проходящая через любые две точки тела, перемещается, оставаясь параллельной самой себе. При поступательном движении все точки тела описывают одинаковые траектории и в любой момент времени имеют одинаковые скорости и ускорения. Поэтому для описания такого движения тела достаточно описать движение его одной произвольной точки. В дальнейшем под словом "тело" будем понимать "материальная точка". Линия, которую описывает движущееся тело в определенной системе отсчета, называется траекторией. На практике форму траектории задают с помощью математических формул (у=f(х) — уравнение траектории) или изображают на рисунке. Вид траектории зависит от выбора системы отсчета. Например, траекторией тела, свободно падающего в вагоне, который движется равномерно и прямолинейно, является прямая вертикальная линия в системе отсчета, связанной с вагоном, и парабола в системе отсчета, связанной с Землей. В зависимости от вида траектории различают прямолинейное и криволинейное движение. Путь s - скалярная физическая величина, определяемая длиной траектории, описанной телом за некоторый промежуток времени. Путь всегда положителен: s> 0. Перемещение тела за определенный промежуток времени - направленный отрезок прямой, соединяющий начальное (точка М0) и конечное (точка М) положение тела (см. рис. 2): , где и — радиус-векторы тела в эти моменты времени. Проекция перемещения на ось Ох: ∆rx =∆х = х-х0, где x0 и x - координаты тела в начальный и конечный моменты времени. Модуль перемещения не может быть больше пути: ≤s. Знак равенства относится к случаю прямолинейного движения, если направление движения не изменяется. Зная перемещение и начальное положение тела, можно найти его положение в момент времени t: Способы задания движения точки Для задания движения точки можно применять один из следующих трех способов: 1) векторный, 2) координатный, 3) естественный. 1. Векторный способ задания движения точки. Пусть точка М движется по отношению к некоторой системе отсчета Oxyz. Положение этой точки в любой момент времени можно определить, задав ее радиус-вектор , проведенный из начала координат О в точку М (рис. 3).  Рис.3 При движении точки М вектор будет с течением времени изменяться и по модулю, и по направлению. Следовательно, является переменным вектором (вектором-функцией), зависящим от аргумента t: Равенство определяет закон движения точки в векторной форме, так как оно позволяет в любой момент времени построить соответствующий вектор и найти положение движущейся точки. Геометрическое место концов вектора , т.е. годографэтого вектора, определяет траекторию движущейся точки. 2. Координатный способ задания движения точки. Положение точки можно непосредственно определять ее декартовыми координатами х, у, z (рис.3), которые при движении точки будут с течением времени изменяться. Чтобы знать закон движения точки, т.е. ее положение в пространстве в любой момент времени, надо знать значения координат точки для каждого момента времени, т.е. знать зависимости x=f1(t), y=f2(t), z=f3(t). Уравнения представляют собой уравнения движения точки в прямоугольных декартовых координатах. Они определяют закон движения точки при координатном способе задания движения. Чтобы получить уравнение траектории надо из уравнений движения исключить параметр t. Нетрудно установить зависимость между векторным и координатным способами задания движения. Разложим вектор на составляющие по осям координат: где rx, ry, rz - проекции вектора на оси; – единичные векторы направленные по осям, орты осей. Так как начало вектора находится в начале координат, то проекции вектора будут равны координатам точки M. Поэтому Если движение точки задано в полярных координатах r=r(t), φ = φ(t), где r — полярный радиус, φ — угол между полярной осью и полярным радиусом, то данные уравнения выражают уравнение траектории точки. Исключив параметр t, получим r = r(φ). Пример 1. Движение точки задано уравнениями  Рис.4 Чтобы исключить время, параметр t, найдём из первого уравнения sin2t=x/2, из второго cos2t=y/3. Затем возведём в квадрат и сложим. Так как sin22t+cos22t=1, получим Начальное положение точки M0 (при t=0) определяется координатами x0=0, y0=3 см. Через 1 сек. точка будет в положении M1 с координатами x1=2sin2=2∙0,91=1,82 см, y1=2cos2=3∙(-0,42)= -1,25 см. Примечание. Движение точки может быть задано с помощью и других координат. Например, цилиндрических или сферических. Среди них будут не только линейные размеры, но и углы. При необходимости, с заданием движения цилиндрическими и сферическими координатами можно познакомиться по учебникам. 3. Естественный способ задания движения точки.  Рис.5 Естественным способом задания движения удобно пользоваться в тех случаях, когда траектория движущейся точки известна заранее. Пусть кривая АВ является траекторией точки М при ее движении относительно системы отсчета Oxyz (рис.5) Выберем на этой траектории какую-нибудь неподвижную точку О', которую примем за начало отсчета, и установим на траектории положительное и отрицательное направления отсчета (как на координатной оси). Тогда положение точки М на траектории будет однозначно определяться криволинейной координатой s, которая равна расстоянию от точки О’ до точки М, измеренному вдоль дуги траектории и взятому с соответствующим знаком. При движении точка М перемещается в положения M1, М2,... . следовательно, расстояние s будет с течением времени изменяться. Чтобы знать положение точки М на траектории в любой момент времени, надо знать зависимость s=f(t). Уравнение выражает закон движения точки М вдоль траектории. Функция s= f(t) должна быть однозначной, непрерывной и дифференцируемой. За положительное направление отсчета дуговой координаты s принимают направление движения точки в момент, когда она занимает положение О. Cледует помнить, что уравнение s=f(t) не определяет закон движения точки в пространстве, так как для определения положения точки в пространстве нужно знать еще траекторию точки с начальным положением точки на ней и фиксированное положительное направление. Таким образом, движение точки считается заданным естественным способом, если известна траектория и уравнение (или закон) движения точки по траектории. Важно заметить, что дуговая координата точки s отлична от пройденного точкой по траектории пути σ. При своем движении точка проходит некоторый путь σ, которой является функцией времени t. Однако пройденный путь σ совпадает с расстоянием s лишь тогда,когда функцияs = f(t) монотонно изменяется со временем, т.е. при движении точки в одном направлении. Допустим, что точка М переходит из М1 в М2. Положению точки в М1 соответствует время t1, а положению точки в М2 - время t2. Разложим промежуток времени t2- t1 на весьма малые промежутки времени ∆t1 (i = 1,2, …n) так, чтобы в каждый из них точка совершала движение в одном направлении. Соответствующее приращение дуговой координаты обозначим ∆si. Пройденной точкой путь σ будет положительной величиной:  Если движение точки задано координатным способом, то пройденный путь определяется по формуле  так как где dx=xdt, dy= ydt, dz=zdt. Следовательно, Пример 2. Точка движется по прямой линии, по закону s=2t+3 (см) (рис. 6).  Рис.6 В начале движения, при t=0 s=OM0=s0=3 см. Положение точки M0 называется начальным положением. При t=1 с, s=OM1=5 см. Конечно, за 1 сек. точка прошла расстояние M0M1=2см.Так что s – это не путь пройденный точкой, а расстояние от начала отсчёта до точки. Вектор скорости точки Одной из основных кинематических характеристик движения точки является векторная величина, называемая скоростью точки. Понятие скорости точки в равномерном прямолинейном движении относится к числу элементарных понятий. Скорость - мера механического состояния тела. Она характеризует быстроту изменения положения тела относительно данной системы отсчета и является векторной физической величиной. Единица измерения скорости – м/с. Часто используют и другие единицы, например, км/ч: 1 км/час=1/3,6 м/с. Движение точки называется равномерным, если приращения радиуса-вектора точки за одинаковые промежутки времени равны между собой. Если при этом траекторией точки является прямая, то движение точки называется прямолинейным. Для равномерно-прямолинейного движения ∆r=v∆t, (1) где v– постоянный вектор. Вектор vназывается скоростью прямолинейного и равномерного движения полностью его определяет. Из соотношения (1) видно, что скорость прямолинейного и равномерного движения является физической величиной, определяющей перемещение точки за единицу времени. Из (1) имеем Направление вектора v указано на рис. 6.1.  Рис.6.1 При неравномерном движении эта формула не годится. Введем сначала понятие о средней скорости точки за какой-нибудь промежуток времени. Пусть движущаяся точка находится в момент времени t в положении М, определяемом радиусом-вектором , а в момент t1 приходит в положение M1 определяемое вектором (рис.7). Тогда перемещение точки за промежуток времени ∆t=t1-t определяется вектором который будем называть вектором перемещения точки. Из треугольника ОММ1 видно, что  Рис. 7 Отношение вектора перемещения точки к соответствующему промежутку времени дает векторную величину, называемую средней по модулю и направлению скоростью точки за промежуток времени ∆t: Скоростью точки в данный момент времени t называется векторная величина v, к которой стремится средняя скорость vср при стремлении промежутка времени ∆t к нулю: Итак, вектор скорости точки в данный момент времени равен первой производной от радиуса-вектора точки по времени. Так как предельным направлением секущей ММ1 является касательная, то вектор скорости точки в данный момент времени направлен по касательной к траектории точки в сторону движения. Определение скорости точки при координатном способе задания движения Вектор скорости точки , учитывая, что rx=x, ry=y, rz=z, найдем: Таким образом, проекции скорости точки на координатные оси равны первым производным от соответствующих координат точки по времени. Зная проекции скорости, найдем ее модуль и направление (т.е. углы α, β, γ, которые вектор v образует с координатными осями) по формулам Итак, численная величина скорости точки в данный момент времени равна первой производной от расстояния (криволинейной координаты) s точки по времени. Направлен вектор скорости по касательной к траектории, которая нам наперед известна. Определение скорости точки при естественном способе задания движения Величину скорости можно определить как предел (∆r – длина хорды ММ1): где ∆s – длина дуги ММ1. Первый предел равен единице, второй предел – производная ds/dt. Следовательно, скорость точки есть первая производная по времени от закона движения: Направлен вектор скорости, как было установлено ранее, по касательной к траектории. Если величина скорости в данный момент будет больше нуля, то вектор скорости направляется в положительном направлении Вектор ускорения точки Ускорение — векторная физическая величина, характеризующая быстроту изменения скорости. Оно показывает, на какую величину изменяется скорость тела за единицу времени. В СИ единицей ускорения является метр на секунду в квадрате . Пусть в некоторый момент времени t движущаяся точка находится в положении М и имеет скорость v, а в момент t1 приходит в положение M1 и имеет скорость v1 (рис. 8).  Рис.8 Тогда за промежуток времени ∆t=t1-t скорость точки получает приращение . Для построения вектора отложим от точки М вектор, равный v1, и построим параллелограмм, в котором диагональю будет , a одной из сторон . Тогда, очевидно, вторая сторона и будет изображать вектор . Заметим, что вектор всегда направлен в сторону вогнутости траектории. Отношение приращения вектора скорости к соответствующему промежутку времени ∆t определяет вектор среднего ускорения точки за этот промежуток времени: Вектор среднего ускорения имеет то же направление, что и вектор , т.е. направлен в сторону вогнутости траектории. Ускорением точки в данный момент времениt называется векторная величина , к которой стремится среднее ускорение при стремлении промежутка времени ∆t к нулю: Вектор ускорения точки в данный момент времени равен первой производной от вектора скорости или второй производной от радиуса-вектора точки по времени. Ускорение точки равно нулю лишь тогда, когда скорость точки v постоянна как по величине, так и по направлению: это соответствует только прямолинейному и равномерному движению. Найдем, как располагается вектор по отношению к траектории точки. При прямолинейном движении вектор направлен вдоль прямой, по которой движется точка. При прямолинейном движении с возрастающей по модулю скоростью (рис. 9, а) векторы и сонаправлены ( ) и проекция ускорения на направление движения положительна. При прямолинейном движении с убывающей по модулю скоростью (рис. 9, б) направления векторов и противоположны ( ) и проекция ускорения на направление движения отрицательна.  Рис.9 Если траекторией точки является плоская кривая, то вектор ускорения , так же как и вектор , лежит в плоскости этой кривой и направлен в сторону ее вогнутости. Если траектория не является плоской кривой, то вектор направлен в сторону вогнутости траектории и лежит в плоскости, проходящей через касательную к траектории в точке М и прямую, параллельную касательной в соседней точке M1 (рис. 8). В пределе, когда точка М стремится к М, эта плоскость занимает положение так называемой соприкасающейся плоскости, т.е. плоскости, в которой происходит бесконечно малый поворот касательной к траектории при элементарном перемещении движущейся точки. Следовательно, в общем случае вектор ускорения лежит в соприкасающейся плоскости и направлен в сторону вогнутости кривой. Определение ускорения при координатном способе задания движения Вектор ускорения точки в проекции на оси получаем: Или т.е. проекция ускорения точки на координатные оси равны первым производным от проекций скорости или вторым производным от соответствующих координат точки по времени. Модуль и направление ускорения найдутся из формул где α1, β1, γ1 - углы, образуемые вектором ускорения с координатными осями. Пример 3. Движение точки задано уравнениями x=2t, y=3-4t2. Из первого уравнения t=x/2. Подставив во второе, получим уравнение траектории: y=3-x2 Это уравнение параболы. В начале движения, при t=0, точка находилась на самом верху, в положении M0 (x0=0, y0=3 см). А, например, при t =0,5 c она будет в положении M с координатами x1=1 см; y1=2 см. Проекции скорости на оси vx= =2см∙с-1, vy= =-8t см∙с-1. При t =0,5 c, vx=2см∙с-1, vy=-4 см∙с-1. И модуль скорости Составляющие скорости по осям и вектор её показаны в масштабе на рис. 10.  Рис.10 Проекции ускорения ax= =0, ay= =-8 см∙с-2. Так как проекция вектора ускорения на ось x равна нулю, а на ось y – отрицательна, то вектор ускорения направлен вертикально вниз, и величина его постоянна, не зависит от времени. Определение ускорения в полярных координатах Пусть движение точки М в плоскости Оху задано в полярных координатах r= r(t); φ= φ(t). Декартовы координаты выражаются через полярные по формулам х= r∙соsφ, у= r∙sinφ. Найдем проекции ar и aφ ускорение aточки на радиальное (r) и трансверсальное (φ) направление (рис.10.1) Для ax и ay имеем выражение ax=arcosφ - aφsinφ, ay=arsinφ + aφcosφ C другой стороны, ax=x=rcosφ – 2rφsinφ – rcosφ ∙φ2 – rsinφ ∙φ, ay=y=rsinφ + 2rφcosφ - rsinφ ∙φ2 + rcosφ ∙φ. 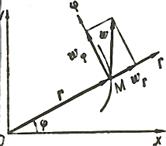 Рис.10.1 Таким образом, получим ar=r – rφ2, aφ=2rφ + rφ. Модуль ускорения Обозначая через θ угол, образованный ускорением с положительным радиальным направлением, определим направление ускорения a точки по формуле Определение ускорения при естественном способе задания движения. Касательное и нормальное ускорение точки При естественном способе задания движения вектор определяют по его проекциям на оси Mτnb, имеющие начало в точке М и движущиеся вместе с нею (рис.11). Эти оси, называемые осями естественного трехгранника (или скоростными (естественными) осями), направлены следующим образом: ось Mτ - вдоль касательной к траектории в сторону положительного отсчета расстояния s; ось Mn - по нормали, лежащей в соприкасающейся плоскости и направленной в сторону вогнутости траектории; ось Mb - перпендикулярно к первым двум так, чтобы она образовала с ними правую тройку. Нормаль Mn, лежащая в соприкасающейся плоскости(вплоскости самой кривой, если кривая плоская), называетсяглавной нормалью, а перпендикулярная к ней нормаль Mb - бинормалью. Естественные оси – это подвижные оси, связанные с движущейся точкой М и образующие правую прямоугольную систему координат. Плоскость, проходящая через обе нормали (главную нормаль n и бинормаль b), называется нормальной плоскостью. Координатная плоскость, проходящая через касательную нормаль n, называется соприкасающейся плоскостью. Соприкасающуюся плоскость в некоторой точке М кривой можно определить также, как предельное положение плоскости, проходящей через касательную в точке М и любую точку кривой М1, когда последняя стремится в пределе к совпадению с точкой М. При движении точки по траектории направления естественных осей непрерывно изменяются.  Рис.11 Было показано, что ускорение точки лежит в соприкасающейся плоскости, т.е. в плоскости Mτn; следовательно, проекция вектора на бинормаль равна нулю (a=0). Вычислим проекции , на две другие оси. Пусть в моментвремени t точка находится в положении М и имеет скорость v, a в момент t1=t+∆t приходит в положение М1 и имеет скорость v1. Тогда по определению Перейдем в этом равенстве от векторов к их проекциям на оси Mτ и Mn, проведенные в точке М (рис.11). Тогда на основании теоремы о проекции суммы (или разности) векторов на ось получим: Учитывая, что проекция вектора на параллельные оси одинаковы, проведем через точку М1 оси , параллельные Mτ, Mn, и обозначим угол между направлением вектора и касательной Mτ через ∆φ. Этот угол между касательными к кривой в точках М и М1 называется углом смежности. Напомним, что предел отношения угла смежности ∆φ к длине дуги MM1=∆s определяет кривизну k кривой в точке М. Кривизна же является величиной, обратной радиусу кривизны ρ в точке М. Таким образом, Обращаясь теперь к чертежу (рис.11), находим, что проекции векторов и на оси Mτ, Mn, будут равны: где v и v1 - численные величины скорости точки в моменты t и t1. Следовательно, Заметим что при ∆t→0 точка М1 неограниченно приближается к М и одновременно Тогда, учитывая, что в пределе Правую часть выражения an преобразуем так, чтобы в нее вошли отношения, пределы которых нам известны. Для этого умножим числитель и знаменатель дроби, стоящей под знаком предела, на ∆φ∆s. Тогда будем иметь так как пределы каждого из стоящих в скобке сомножителей при ∆t→0 равны: Окончательно получаем: Итак, мы доказали, что проекция ускорения точки на касательную равна первой производной от численной величины скорости или второй производной от расстояния (криволинейной координаты) s no времени, а проекция ускорения на главную нормаль равна квадрату скорости деленному на радиус кривизны траектории в данной точке кривой; проекция ускорения на бинормаль равна нулю (ab=0). Эти результаты выражают собою одну из важных теорем кинематики точки.  Рис.12 Отложим вдоль касательной Mτ и главной нормали Mn векторы и , численно равные aτ и an (рис. 12). Эти векторы изображают касательную и нормальную составляющие ускорения точки. При этом составляющая будет всегда направлена в сторону вогнутости кривой (величина a всегда положительна), а составляющая может быть направлена или в положительном, или в отрицательном направлении оси Mτ в зависимости от знака проекции aτ (см. рис.12, а и б). Вектор ускорения точки изображается диагональю параллелограмма, построенного на составляющих и . Так как эти составляющие взаимно перпендикулярны, то по модулю:  Относительность движения. Сложение скоростей Как отмечалось выше, для описания движения тела необходимо выбрать тело отсчета и связать с ним систему координат. В качестве тела отсчета может выступать любое тело. В разных системах отсчета будут различны вид траектории, значения скорости, перемещения и других величин. В этом и заключается относительность движения. Например, человек идет по палубе парохода со скоростью относительно парохода. Пароход движется поступательно со скоростью относительно берега. Найдем скорость человека относительно берега. Свяжем неподвижную систему отсчета (хОу) с Землей, а подвижную (х'О'у') — с пароходом.  Рис.13 Из рис.13 видно, что перемещение где — перемещение человека относительно парохода, — перемещение парохода относительно берега, — перемещение человека относительно берега. Таким образом, если тело одновременно участвует в нескольких движениях, то результирующее перемещение точки равно векторной сумме перемещений, совершаемых ею в каждом из движений. В этом состоит установленный экспериментально принцип независимости движений. Разделив уравнение (1) на промежуток времени, за который произошли перемещения человека и парохода, получим закон сложения скоростей: Скорость тела относительно неподвижной системы отсчета равна геометрической сумме скорости тела относительно подвижной системы отсчета и скорости самой подвижной системы отсчета относительно неподвижной. Закон сложения скоростей справедлив и для неравномерного движения, только в этом случае Этот закон был установлен Г. Галилеем. Он справедлив только для движений со скоростями, намного меньшими скорости света с = 3∙108 (м/с). Такие скорости в физике называют нерелятивистскими. Некоторые частные случаи движения точки. Пользуясь полученными результатами, рассмотрим некоторые частные случаи движения точки. Равномерное прямолинейное движение Равномерное прямолинейное движение - это движение, при котором тело за любые равные промежутки времени совершает равные перемещения, т. е. это движение с постоянной по модулю и направлению скоростью: — уравнение скорости, — уравнение ускорения. Пусть в момент времени t0=0 координата тела х0, в момент t - х (рис. 14).  Рис.14 Тогда за промежуток времени Δt=t-t0=t координата X тела изменилась на величину ∆х = х - х0. Следовательно, проекция скорости тела ,следовательно, x=x0+vxt- кинематическое уравнение равномерного движения (уравнение зависимости координаты от времени). Проекция перемещения ∆rx=х-х0 ∆rx=vxt - уравнение перемещения. При равномерном прямолинейном движении направление скорости не изменяется, поэтому путь . Следовательно, — уравнение пути. Зависимость кинематических величин от времени можно изобразить графически. Изобразим графики скорости, перемещения, пути и координаты для трех тел: 1, 2, 3 (рис. 15).  Рис.15 Тела 1, 2 движутся в положительном направлении оси Ох, причем ; тело 3 движется в направлении, противоположном оси Ох; их начальные координаты соответственно , . Графики скорости представлены на рис.16. Площадь заштрихованного прямоугольника численно равна пути s (модулю перемещения), пройденному телом 1 за время t1. На рис.17 даны графики перемещения , на рис.18 - графики пути s=f(t). 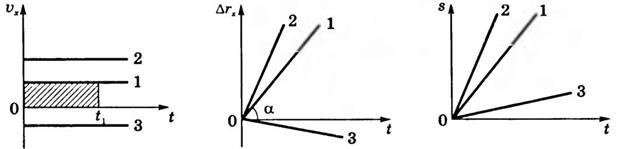 Рис.16 Рис.17 Рис.18 Наклон графика , к оси времени зависит от модуля скорости: . Графики движения (зависимости координаты от времени) изображены на рис.19.  Рис.19 С помощью графика движения можно определить: 1) координаты тела в любой момент времени; 2) путь, пройденный телом за некоторый промежуток времени; 3) время, за которое пройден какой-то путь; 4) кратчайшее расстояние между телами в любой момент времени; 5) момент и место встречи тел и др. Равноускоренное прямолинейное движение Равноускоренное прямолинейное движение - это движение, при котором скорость тела за любые равные промежутки времени изменяется одинаково, т. е. это движение с постоянным по модулю и направлению ускорением. =сonst — уравнение ускорения. По определению ускорения . Пусть в момент времени t0 скорость тела равна , в момент времени t - . Тогда за промежуток времени ∆t=t-t0=t скорость изменилась на . Следовательно, ускорение — уравнение скорости. Или в проекциях: Эти зависимости кинематических величин от времени изобразим графически для трех тел (рис.20). 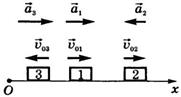 Рис.20 Графики ускорения представлены на рис.21, а графики скорости - на рис.22. Для нахождения перемещения воспользуемся графиком скорости (рис.23). Для малого промежутка времени ∆t изменением величины скорости можно пренебречь и скорость можно считать постоянной. Тогда перемещение за промежуток времени ∆t будет равно площади узкой густо заштрихованной полоски. Мысленно разбив все время движения тела на малые промежутки времени и найдя перемещение за каждый отдельный промежуток времени, суммируем эти перемещения. Модуль проекции перемещения за промежуток времени ∆t=t-t0=t в пределе численно равен площади заштрихованной трапеции.  Рис.21 Рис.22 Рис.23 Следовательно, Подставив значение Учитывая, что х=х0+∆rх, имеем: Его векторный вид: Исключая из уравнений скорости и перемещения время t, получим: Сравнивая выражение (2) с формулой Графиком перемещения является парабола, положение вершины которой зависит от направлений начальной скорости и ускорения (рис.24). 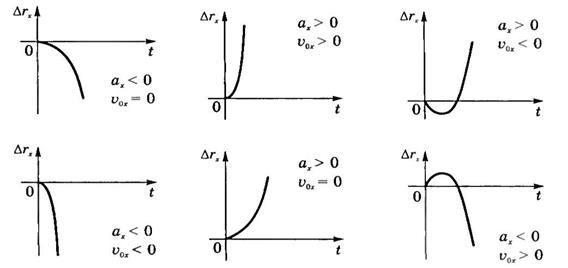 Рис.24 Равномерное криволинейное движение Равномерным называется такое криволинейное движение точки, в котором численная величина скорости все время остается постоянной: v=const. Тогда Вектор ускорения направлен при этом все время по нормали к траектории точки. Так как в данном случае ускорение появляется только за счет изменения направления скорости, то отсюда заключаем, что нормальное ускорение характеризует изменение скорости по направлению. Найдем закон равномерного криволинейного движения. Из формулы имеем ds=vdt. Пусть в начальный момент (t=0) точка находится от начала отсчета на расстоянии s0. Тогда, беря от левой и правой части равенства определенные интегралы в соответствующих пределах, получим  так как v=const. Окончательно находим закон равномерного криволинейного движения в виде s=s0+vt. Если s0=0, то s даст путь, пройденный точкой за времяt. Следовательно, при равномерном движении путь, пройденный точкой, расчет пропорционального времени, а скорость движения равна отношению пути ко времени s=vt, v=s/t. Равнопеременное криволинейное движение. Равнопеременным называется такое криволинейное движение точки, при котором касательное ускорение остается все время величиною постоянной: aτ=const. Найдем закон этого движения, считая, что при t=0: s=s0, а v=v0, где v0 - начальная скорость точки. Согласно формуле имеем dv=aτdt. Так как aτ=const, то, беря от обеих частей последнего равенства интегралы в соответствующих пределах, получим: v=v0+aτt. Формулу представим в виде Вторично интегрируя, найдем закон равнопеременного криволинейного движения точки в виде Если при криволинейном движении точки модуль скорости возрастает, то движение называется ускоренным, а если убывает - замедленным. Свободное падение тел. Ускорение свободного падения Свободное падение - это движение тела под действием только силы тяжести. На тело, падающее в воздухе, кроме силы тяжести действует сила сопротивления воздуха, следовательно, такое движение не является свободным падением. Свободное падение — это падение тел в вакууме. Ускорение , которое сообщает телу сила тяжести, называют ускорением свободного падения. Оно показывает, на какую величину изменяется скорость свободно падающего тела за единицу времени. Ускорение свободного падения направлено вертикально вниз. Галилео Галилей установил (закон Галилея): все тела падают на поверхность Земли под действием земного притяжения при отсутствии сил сопротивления с одинаковым ускорением, т.е. ускорение свободного падения не зависит от массы тела. Убедиться в этом можно, используя трубку Ньютона или стробоскопический метод. Трубка Ньютона представляет собой стеклянную трубку длиной около 1 м, один конец которой запаян, а другой снабжен краном (рис. 25).  Рис.25 Поместим в трубку три разных предмета, например дробинку, пробку и птичье перо. Затем быстро перевернем трубку. Все три тела упадут на дно трубки, но в разное время: сначала дробинка, затем пробка и, наконец, перо. Но так падают тела в том случае, когда в трубке есть воздух (рис. 25, а). Стоит только воздух откачать насосом и снова перевернуть трубку, мы увидим, что все три тела упадут одновременно (рис. 25, б). В земных условиях g зависит от географической широты местности. Наибольшее значение оно имеет на полюсе g=9,81 м/с2, наименьшее — на экваторе g=9,75 м/с2. Причины этого: 1) суточное вращение Земли вокруг своей оси; 2) отклонение формы Земли от сферической; 3) неоднородное распределение плотности земных пород. Ускорение свободного падения зависит от высоты h тела над поверхностью планеты. Его, если пренебречь вращением планеты, можно рассчитать по формуле: где G — гравитационная постоянная, М — масса планеты, R — радиус планеты. Как следует из последней формулы, с увеличением высоты подъема тела над поверхностью планеты ускорение свободного падения уменьшается. Если пренебречь вращением планеты, то на поверхности планеты радиусом R Для небольших высот (g< |