Модернизация рулевого управления с гидравлическим усилителем автомобиля Лада Ларгус с разработкой технологического процесса разб. ПЗ. Конструировании узлов и деталей
 Скачать 1 Mb. Скачать 1 Mb.
|

|
ВВЕДЕНИЕ При конструировании узлов и деталей автомобиля необходимо учитывать различные требования по надежности, топливной экономичности, ремонтопригодности, требованиям безопасности, а также обеспечение максимальной технологичности каждого узла и детали автомобиля. Анализ аварийных ситуаций становится все более важным, если учесть, что за последние 20 лет количество транспортных средств увеличилось в 6 раз, и требования к их безопасности постоянно возрастают. Исследования показали, что основная причина получения тяжелых и смертельных травм - удары о передний щиток и рулевую колонку. Таким образом рулевая колонка является основным источником травм водителя при лобовых столкновениях. Для уменьшения количества несчастных случаев на автомобильных дорогах необходимо дальнейшее совершенствование активных и пассивных средств, повышение безопасности как автомобиля, так и дорожного движения. К средствам пассивной безопасности относятся те элементы конструкции автомобиля и дорог, которые снижают тяжесть последствий дорожно-транспортных происшествий без активных действий со стороны участников движения. К такому средству относится травмобезопасная рулевая колонка, которая при столкновении автомобиля, поглощает кинетическую энергию удара. В качестве энергопоглощающих устройств в рулевых колонках применяют металлические, резиновые, пластмассовые деформирующиеся, разрушающиеся или смещающиеся детали. Используются энергопоглощающие устройства с жидкостью и газом. ИССЛЕДОВАТЕЛЬСКАЯ ЧАСТЬ 1.1 Рулевое управление. Назначение Рулевое управление создано для изменения и поддержания направления движения автомобиля, включает в себя все части элементы от рулевого колеса до рычага рулевой тяги. Рулевое управление есть совокупность узлов и деталей, осуществляющих поворачивание управляемых колес автомобиля. В классическом случае управление состоит из трех основных частей: рулевого механизма; рулевого привода; усилителя. За последнее время инженеры-автомобилестроители внесли значительные усовершенствования в конструкцию автомобиля, стало появляться большее число совершенно новых конструктивных решений. На автомобилях изменяется направление движения осуществлением поворота передних колес различными типами рулевых управлений. В зависимости от принятого в стране направления движения автомобилей различают левое (Россия, США и др.) или правое (Япония, Великобритания) рулевое управление. Для облегчения управления все чаще применяют различные усилители рулевого управления. Рулевые механизмы без усилителя обычно устанавливаются на самых малых классов и грузовых малой грузоподъемности. Однако, в последнее время, в целях повышения комфорта на такие автомобили устанавливаются усилители рулевого управления. При этом ощутимо облегчается их управление, улучшаются показатели маневренности и повышается безопасность — при разрыве шины автомобиль можно постараться удержать на нужной траектории движения. Главной задачей рулевого управления есть вероятно более однозначное преобразование угла при поворот рулевого колеса в угол при поворот колес и обратная передача водителю через рулевое колесо информацию о направлении движения автомобиля. 1.2. Требования, предъявляемые к рулевому управлению Между поворотами рулевого колеса и желаемым изменением направления движения автомобиля прямая функциональная связь не существует, так как цепь «поворот руля — изменение угла передних колес — происхождение боковых сил — изменение направления движения» не постоянна, в следствие ограниченной жесткости частей рулевого управления. Поэтому, во время езды связь между углом поворота руля, и вызванной им сменой направления движения при случае меняется. В результате водитель должен перерабатывать огромный объем информации, которая далеко выходит за рамки визуальной (сход автомобиля с нужной траектории). Сюда можно также отнести, к примеру, вынужденный наклон водителя под действием поперечного ускорения автомобиля и стабилизирующий момент на рулевом колесе, ощутимый водителем. Также задачей рулевого управления имеется ввиду возможно более прямое преобразование угла поворота руля в угол поворота колес и передача водителю через руль информации о положении движения автомобиля. Для обеспечения данной важной функции к рулевому управлению предъявляются требования: обеспечение большой маневренности автомобилей, при которой осуществляются быстрые и крутые повороты на сравнительно ограниченны; легкость управления автомобилем, оцениваемая величиной усилия, прикладываемого к рулевому колесу; огромная степень надежности воздействия, поскольку в отличие от многих других узлов агрегатов и механизмов автомобиля выдох рулевого управления из стром в большем количестве случаев оканчивается аварией или катастрофой; также правильная кинематика поворот, с которой все колеса автомобиля катятся по ком центра чески м окружностям (не выполнение данного условия приводит к скольжению шин или заносу автомобиля по дороге, быстрому их износу, наибольшему нарастанию оборотов двигателя и расходу топлива); хорошее ощущение толчков и воздействий от дороги на рулевом колесе при проезде по плохим дорогам (при ощущениях на руле толчков водитель быстрее утомляется и снижается безопасность и безаварийность движения); точность отслеживающего действия, а главное кинематическое, в котором любому заданному положению руля будет соответствовать всегда определенная ранее рассчитанная крутость поворота; отсутствие в самом рулевом управлении недопустимых люфтов, приводящих к ухудшению связи автомобиля с дорогой, к его вихлянию, в том числе при движении на больших скоростях или даже при движении по ухабистым дорогам; экономические требования: сокращение числа деталей рулевого управления без уменьшения безопасности использования, унификация производимых деталей, упрощение технологии его изготовления без ущерба надежности, уменьшение габаритов, исключение необходимости в частой регулировке во время эксплуатации и в уходе за всеми подвижными деталями. 1.3 Конструкция рулевого управления. Классификация Рулевое колесо через карданный вал передает на рулевой механизм вращающий момент, осуществляемый руками водителя, и переводит его в силы растяжения, и силы сжатия соответственно, которые через боковые тяги воздействуют на поворотные рычаги рулевой трапеции автомобиля. Рычаги закреплены на поворотных цапфах и поворачивают их на определенный угол. Рулевые механизмы делятся на механизмы с вращательным и возвратно поступательным движениями в итоге. Обычно устанавливаются рулевые механизмы трех типов: "червяк 2 гребневый ролик", "винт гайка с циркулирующими шариками" – с вращательным движением в итоге, и "шестерня-рейка" – с вращательно поступательным. Но, в свою очередь, является очень дорогим из всех типов рулевых механизмов. В винтовой паре всех этих механизмов действует не трение скольжения, а трение качения. Гайка, являясь одновременно и рейкой, находиться в зацеплении с зубчатым сектором винта. Ввиду маленького угла поворота сектора, у этого механизма достаточно легко реализовать переменное передаточное число, с повышением оного по мере увеличения угла поворота руля, за счет установки сектора в положении эксцентриситета, либо применением переменного шага зубчатого зацепления. Высокий КПД, надежность, стабильность характеристик во время больших нагрузок, высокая износостойкость, возможность получения без зазорного соединения, обусловили также практическое исключительное использование этих механизмов на почти всех автомобилях большего и высшего классов, и части среднего класса. На легковых автомобилях малых и особо малых классов устанавливаются рулевые механизмы вида "червяк ролик" и "шестерня рейка". При зависимой подвеске передних колес, которая в настоящее время почти не применяется или применяется только для высокой проходимости, необходим к установке рулевой механизм только с вращательным движением на выходе. "Червяк ролик" хуже механизма "шестерня рейка" и по причине удобства компоновки узлов на переднеприводных автомобилях последние механизмы получили крайне широкое применение. Реечный рулевой механизм есть самый распространенный тип механизма, применяемым на легковых автомобилях. Реечный рулевой механизм включает в свою конструкцию шестерню и рулевую рейку. Шестерня соединяется с помощью карданов с валом рулевого колеса и находится в постоянном зацеплении с рулевой (зубчатой) рейкой. Работа реечного рулевого механизма осуществляется по следующему алгоритму. При вращении рулевого колеса рейка перемещается в стороны. При движении рейки перемещаются соединенные с ней тяги рулевого привода и поворачивают управляемые колеса. Реечный рулевой механизм простой по своей конструкции, соответственно имеет высокий КПД, а также высокую надежность. 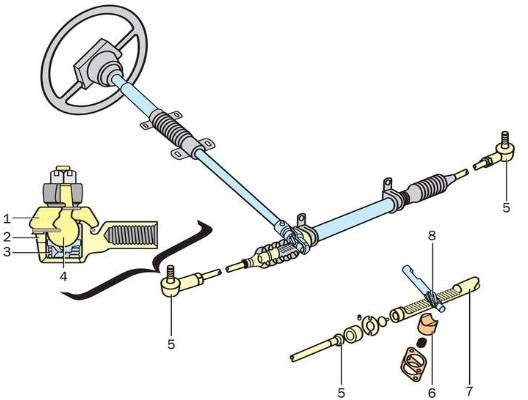 Рис. 1 Реечный рулевой механизм: 1 — чехол; 2 — вкладыш; 3 — пружина; 4 — шаровой палец; 5 — шаровой шарнир; 6 — упор; 7 — рулевая рейка; 8 — шестерня Червячный рулевой механизм состоит из глобоидного червяка (червяка с непостоянным диаметром), также соединенного с рулевым валом, и ролика. На валу ролика вне корпуса рулевого механизма установлен рычаг - сошка, связанная с тягами рулевого редуктора. Червячный рулевой механизм обладает сравнительно меньшей чувствительностью к ударным нагрузкам, обеспечивает гораздо большие углы поворота управляемых колес и также лучшую маневренность автомобиля. А с другой стороны червячный механизм сложен в изготовлении, и по этой причине дорог. 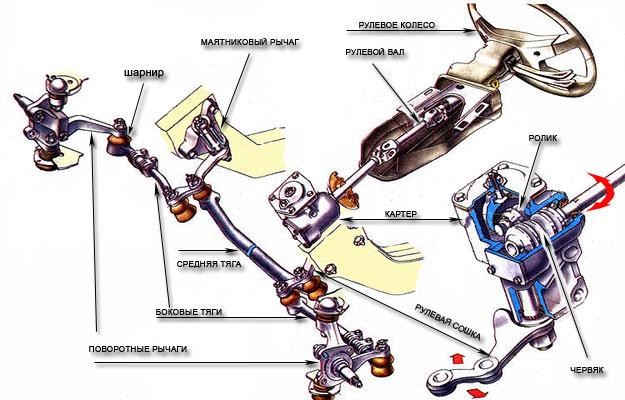 Рис. 2 Червячный рулевой механизм Рулевое управление с таким механизмом имеет большое число соединений и деталей, поэтому требуется периодическая регулировка. Червячный рулевой механизм применяется почти на всех легковых автомобилях высокой проходимости с зависимой подвеской управляемых колес, легких грузовых автомобилях и автобусах. Ранее такой тип рулевого механизма устанавливался на отечественных «жигулях». Винтовой рулевой механизм вбирает в себя следующие конструктивные элементы: винт, иногда соединенный карданом с валом рулевого колеса; гайку, перемещаемую по винту; зубчатую рейку, вырезанную по гайке; зубчатый сектор, соединенный с рейкой; рулевую сошку, расположенную на валу сектора. Особенностями винтового рулевого механизма являются соединения винта и гайки с помощью шариков, вследствие чего достигается меньшее трение и износ механизма. По своей сути работа винтового рулевого механизма почти схожа с работой червячного механизма. Поворот руля сопровождается вращением винта, который перемещает насаженную на него гайку. При этом происходит круговое движение шариков. Гайка с помощью зубчатой рейки перемещает зубчатый сектор и с ним рулевую сошку. 1.4 Рулевое управление. Обзор и тенденции Не так давно существовали два варианта рулевых механизмов с дискретными гидроусилителями: реечные и «винт шариковая гайка сектор». Последние ставили на большие автомобили и автомобили повышенной проходимости. А сегодня и на тяжелых машинах все чаще и чаще появляются облегченные реечные рулевые механизмы. Делать управление комфортным почти во всех случаях, помогают редукторы рулевых мехпнизмов с переменным передаточным отношением: в центральной части рейки зубья нарезаны с малыми шагами, на концах - шаг больше. При небольших углах поворота машина не так остро и резко реагирует на действия рулем, что в свою очередь крайне важно на высоких скоростях, зато, разворачиваясь, крутить руль на месте приходится меньше. Еще больше комфорта и безопасности привнесли системы изменяющие усилие водителя на руле в зависимости от скорости движения. Пример - система «Сервотроник». В верхней части распределителя находится полость обратного действия. В ней и двигается поршень, связан с золотником. Такое устройство работает эффективно и надежно, однако гидравлический насос потребляет мощность двигателя, увеличивая расход зоил ива. Такое решение недопустимо для автомобилей с маломощными двигателями. Конструкторы нашли иное решение: давление рабочей жидкости нагнетает вспомогательный электрический насос. Блок управления считывает информацию от датчиков вращения руля, а также скорости автомобиля. Производители знают, что благодаря электрогидравлическим усилителям автомобиль способен экономить около 0,2 л/100 км. Также известно, что инженерам намного проще подбирать характеристики, настраивать устройство для конкретной модели автомобиля. Испытания рулевого механизма входят в состав дорожных испытаний на надежность и всех валидационных испытаний автомобиля. Следующий шаг — активное управление (Active Steering). Главное его преимущество — возможность менять передаточное число между рулем и управляемыми колесами. На отрезке пути от рулевого колеса к рулевому механизму с гидроусилителем внедрена планетарная передача с дополнительным электромотором. Когда автомобиль отъезжает от места остановки, передаточное отношение соответственно минимально, а количество полных оборотов руля получается не более двух. С ростом скорости транспортного средства управление также становится менее чувствительным, а стоит немного увеличить скорость — как электромотор, ускоряя водило планетарного редуктора, увеличивает передаточное число в нем. В свою очередь активное рулевое управление, работая совместно с другими системами автомобиля, способно помочь и в сложных ситуациях. Например, в случае, когда автомобиль заносит, блок управления, опросив датчики угла поворота рулевого колеса и скорости, подаст питание на электромотор, который непременно уменьшит передаточное число, чтобы водителю было намного легче удержать автомобиль на дороге. Также активный руль несомненно полезен и при экстренном торможении с антиблокировочной системой тормозов (ABS): если совершить остановку вовремя не удается, то водителю будет проще уйти от столкновения. Подобная система впервые была установлена на серийные модели автомобилей BMW пятой серии. Возможно, в скором времени такие системы будут устанавливаться на множестве автомобилей, пока им на смену не придет непрямое управление, или управление по проводам. Принцип действия электро и гидроусилителя во многом схож. Поворачивая рулевое колесо, водитель закручивает торсион — чувствительный элемент, посылающий блоку управления или компьютеру, который команду электромотору, который подкручивает руленой нал, снижая усилие на руде, Широкое распространение электро и гидроусилителей придерживает нынешний 12-вольтовый тип электрооборудования. Поэтому пока их немного и они встречаются лишь на небольших автомобилях. Может быть, будущее не за хитрой механикой или гидравликой, а усложненными электроникой. Крупнейшие автомобильные компании интенсивно работают над системами бет механической святи между рулем и колесами — так называемым управлением по проводим («steering by wire»). В этом случае вращательное движение руля выслеживает специальный датчик. Электронный блок управления, получая информацию о скорости, боковых и вертикальных ускорениях, посылают сигнал на привода актуаторы — электромоторы, поворачивающие колеса. Достоинства такой системы весьма очевидны. В критической ситуации на дороге автомобиль сможет самостоятельно (причем намного быстрее человека) повернуть колеса на достаточный угол. Самостоятельность автомобиля определено упростит жизнь водителю: например, компьютер сможет легко припарковать автомобиль. Такие системы выгодны и технологически: протянуть провода куда надо намного проще, чем валы и тяги с шарнирами. Рулевая трапеция уходит в прошлое - разность углов поворота колес теперь задают сами электромоторы. Кстати, и если рассматривать пассивную безопасности данная конструкция отнюдь лучше. Однако, пока не будет решена проблема надежности таких систем, серийного распространения они не получат в целях обеспечения безопасности движения. 1.5 Описание выбранного варианта конструкции Самое широкое применение в производстве нашли следующие типы реечного рулевого управления: Тип 1 – боковое расположение ведущей шестерни (слева или справа в зависимости от расположении рулевого колеса) также при креплении боковых тяг к концу зубчатой рейки (см. Рис. 1); 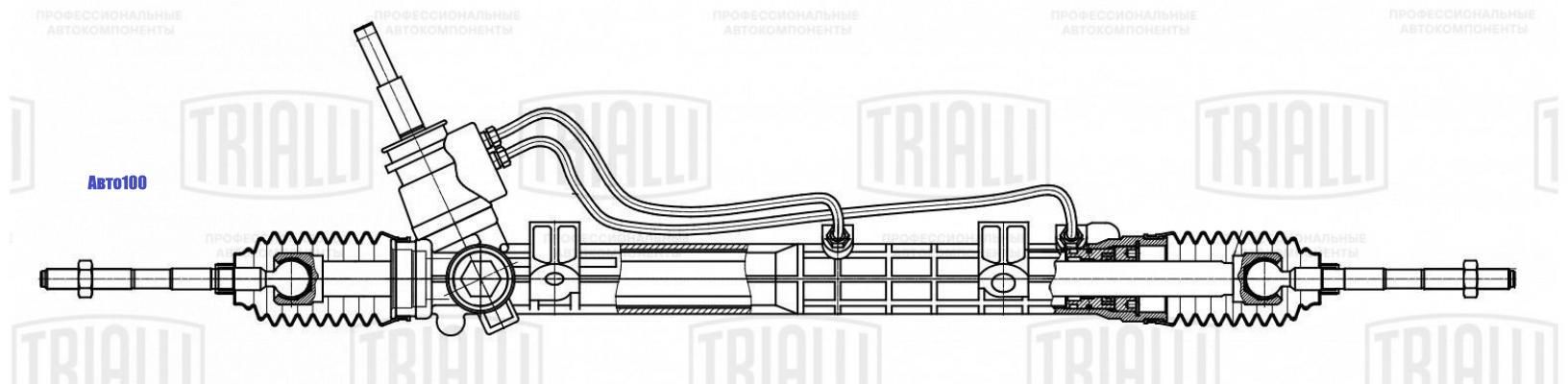 Тип2– боковое расположение ведущей шестерни при креплении боковых тяг почти к середине зубчатой рейки (см. Рис. 2); Тип2– боковое расположение ведущей шестерни при креплении боковых тяг почти к середине зубчатой рейки (см. Рис. 2);Рис. 3. Исполнение реечного рулевого управления. Тип 1  Рис. 4. Исполнение реечного рулевого управления. Тип 2 Выбираем Тип 1. ТЕХНОЛОГИЧЕСКАЯ ЧАСТЬ 2.1 Освоение изменения конструкции рулевого управления. Технологический процесс сборки |