Лекции. Лекции ТММ. Лекции по теории механизмов и машин. Учебное пособие к изучению теоретических основ курса для студентов направлений 050502 Инженерная механика
 Скачать 5.61 Mb. Скачать 5.61 Mb.
|

|
1 После определения всех необходимых понятий приведем классификацию кинематических пар по классам и отдельным видам с указанием принадлежности пары к низшим или высшим. Таблица 1.1 Классификация кинематических пар
Таблица 1.1 (продолжение)
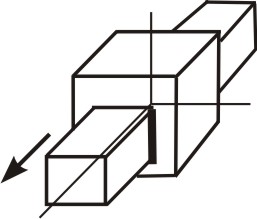
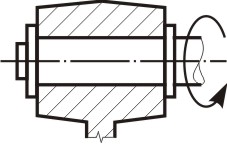
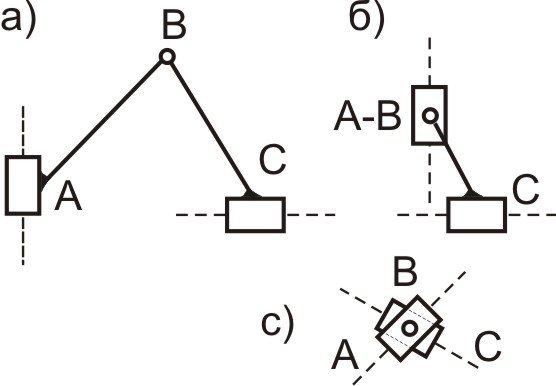
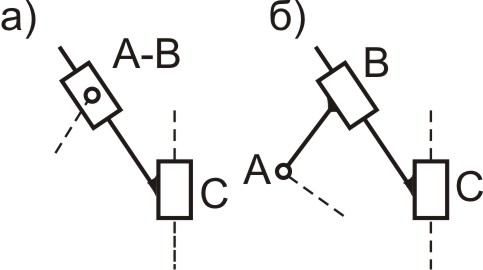
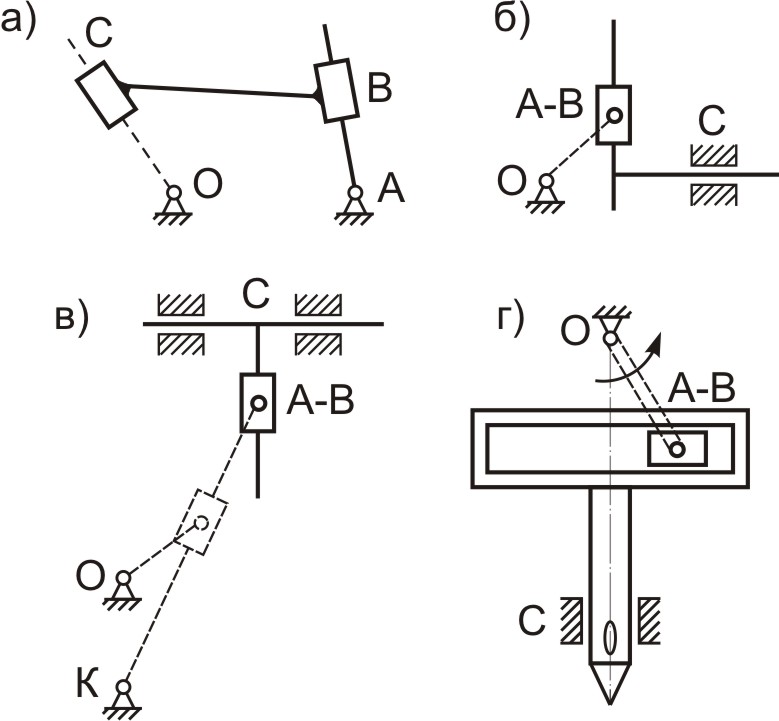
При сопоставлении степени подвижности винтовой кинематической пары (1-но подвижная) с числом разрешаемых парой движений (на рисунке показано два – линейное перемещение винта в направлении оси и поворот винта вокруг оси) может показаться, что допущена ошибка. Действительно, при 2-х относительных движениях звеньев степень подвижности пары должна равняться 2-м??? На самом деле, никакой ошибки и противоречия здесь нет. Дело в том, что между указанными 2-мя перемещениями существует однозначная кинематическая связь. В силу этой кинематической связи, задав угол поворота винта, получают строго определенное перемещение по оси, и наоборот. Следовательно, независимое перемещение только одно, а степень подвижности винтовой кинематической пары, определяемая числом независимых относительных перемещений, равна 1. Вопросы для самоконтроля Объясните смысл понятий «машина», «механизм», «кинематическая цепь», «звено», «кинематическая пара». В чем суть деления кинематических пар на классы? Сколько этих классов? Как связаны класс кинематической пары и ее степень подвижности? Приведите примеры одноходовых кинематических пар. Лекция 2 Структурный анализ механизмов Механизм. Структурная и кинематическая схемы. Масштабные коэффициенты в ТММ. Обобщенная координата. ([1], §6; [2], §2.3) Структурные формулы для пространственного и плоского механизмов. ([1], §7-8; [2], §2.4) Замена высших кинематических пар низшими. ([1], §10; [2], §3.5) Структурные группы Л.В.Ассура. Классификация структурных групп. ([1], §12-13; [2], §2.5) Принцип образования механизмов. Класс механизма. Формула строения механизма. ([1], §12-13; [2], §2.5) Порядок структурного анализа. ([1], §12-13; [2], §2.5) Механизм. Структурная и кинематическая схемы. Масштабные коэффициенты в ТММ. Обобщенная координата. Используя понятие «кинематическая цепь» можно дать другое определение понятию «механизм». Механизм – это кинематическая цепь, в которой по заданному положению (или закону движения) относительно стойки одного входного звена (или нескольких входных звеньев) однозначно определяется положение (или закон движения) относительно стойки всех других звеньев [1]. Для изучения структуры или кинематики движения, механизмы изображают в виде абстрактных схем. Эти схемы называют соответственно структурными и кинематическими. Структурная схема – это условное изображение механизма в виде кинематической цепи с использованием общепринятых обозначений звеньев и кинематических пар. Структурная схема строится без учета масштаба. Она показывает, из каких звеньев состоит механизм (входное, выходное, промежуточные) и определяет последовательность и способ их соединения. Структурная схема задается при структурном анализе и является целью структурного синтеза механизма. Структурную схему часто еще называют принципиальной [2]. Кинематическая схема – условное изображение механизма с использованием стандартных обозначений звеньев и кинематических пар, выполненное с учетом реальных пропорций механизма, т.е. в масштабе. Используется для кинематического исследования механизма (определения положений звеньев, определения перемещений отдельных точек и звеньев, траекторий движения точек, их скоростей, ускорений, угловых скоростей и угловых ускорений звеньев). На рис.2.1 изображены примеры структурных схем простых плоских механизмов: кривошипно-ползунного (а), кривошипно-коромыслового (б) и криво- шипно-кулисного (в). Не трудно догадаться, что механизмы названы по названиям входного и выходного звеньев.
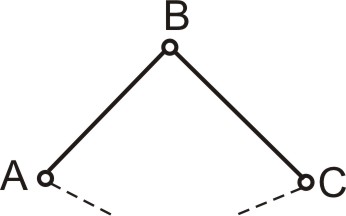
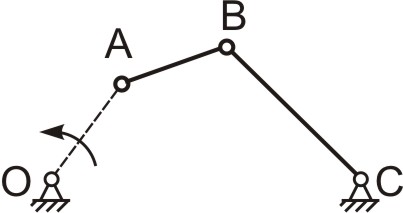
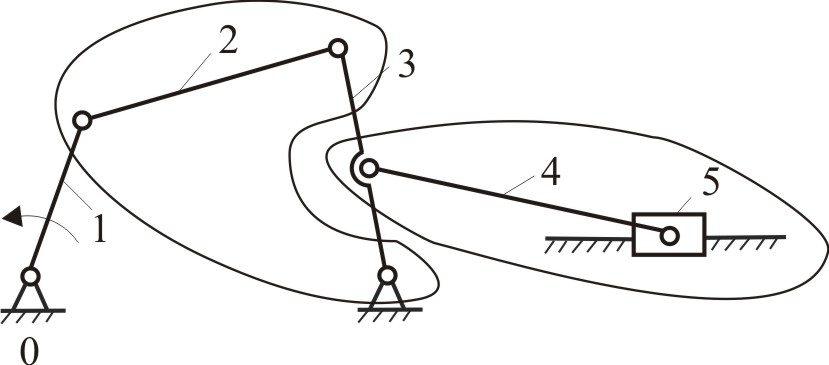
Рис.2.1 Масштабы и масштабные коэффициенты. При использовании графических методов решения задач ТММ, физические величины изображают на чертеже в виде отрезков той или иной длины. Для этого используется понятия «масштаба» или «масштабного коэффициента» изображения физической величины. Эти понятия не тождественны, как может показаться на первый взгляд. Кроме того, они не похожи на масштабы географических карт, генеральных планов предприятий и т.д. Масштаб в ТММ показывает длину отрезка в мм, изображающую единицу физической величины [3]. Масштабным коэффициентом физической величины называют величину, обратную масштабу. Масштабный коэффициент определяется отношением числового значения физической величины в свойственных ей единицах к длине отрезка в мм, изображающего эту величину. Отсюда получают ту или иную размерность масштабных коэффициентов. Приведем несколько примеров масштабных коэффициентов, указав их характерные размерности: масштабный коэффициент длин - масштабный коэффициент линейных скоростей - масштабный коэффициент линейных ускорений - масштабный коэффициент сил - масштабный коэффициент моментов инерции - Понятие масштаба физической величины используется в ТММ не так часто. Гораздо чаще имеют дело с масштабными коэффициентами. Если механизм имеет одну степень подвижности, то для определения положения всех его звеньев (при известной их форме и размерах) достаточно знать положение относительно стойки одного звена. Угловую или линейную координату положения этого звена называют обобщенной координатой для всего механизма. Обобщенная координата – это независимая координата (линейная или угловая), определяющая положение относительно стойки одного из звеньев механизма и позволяющая определить положение (относительно стойки) всех других звеньев. Для кинематического исследования механизму присваивают одну или несколько обобщенных координат. Число обобщенных координат для конкретного механизма определяется числом его степеней подвижности. Звено, которому приписывается обобщенная координата, называют начальным. Часто за начальное принимают входное звено механизма. В то же время, если это удобно для последующего анализа механизма, за начальное может быть принято выходное звено или одно из промежуточных. Если механизм имеет несколько степеней подвижности – назначается несколько начальных звеньев и соответствующих им обобщенных координат. Структурные формулы для пространственного и плоского механизмов. Структурная формула – это формула, по которой определяется степень подвижности механизма в зависимости от числа подвижных звеньев и количества и вида кинематических пар. Для вывода структурной формулы пространственного механизма рассмотрим механизм с - кинематических пар 5 класса ……… - кинематических пар 4 класса ……… - кинематических пар 3 класса ……… - кинематических пар 2 класса ……… - кинематических пар 1 класса ……… имеет степень подвижности, определяемую выражением (2.1): Формула (2.1) называется структурной формулой пространственного механизма (формула П.И.Сомова - А.П.Малышева). Применив аналогичные рассуждения для плоского механизма, и учитывая число степеней свободы в плоскости (не более 3), получим структурную формулу П.Л.Чебышева 1 для плоских механизмов 2: Для плоских механизмов с поступательными парами структурную формулу можно получить из (2.2), уменьшив степени подвижности каждого из слагаемых на единицу (в механизмах с поступательными парами отсутствует поворот звеньев). Эта формула предложена В.В.Добровольским в 1937 г. и носит его имя. Для примера и закрепления материала, определим степень подвижности плоского механизма, изображенного на рис.2.2. П  рименяя формулу Чебышева, получим: рименяя формулу Чебышева, получим:Таким образом, однозначное движение ведомых звеньев 2 и 3 можно получить, введя две обобщенные координаты (т.е. задавая движение двум начальным звеньям 1 и 4 ). Рис.2.2 Степень подвижности плоских механизмов, показанных на рис.2.1, предлагаем определить самостоятельно. Замена высших кинематических пар низшими. В плоских механизмах, содержащих кинематические пары 4-го класса, для структурной классификации и кинематического исследования целесообразно заменять высшие пары низшими. 1 Замена пар является корректной, если после замены исходного механизма заменяющим степень подвижности и кинематика движения характерных точек в заменяемом и заменяющем механизмах становятся одинаковыми. Рассмотрим механизм, изображенный на рис.2.3 сплошными линиями. Он состоит из двух подвижных звеньев АО1и ВО2 , каждое из которых входит со стойкой в кинематическую пару 5-го класса. При этом звенья контактируют между собой, образуя подвижное соединение в виде высшей пары 4-го класса. Элементами высшей пары являются дуги окружностей с центрами Определим степень подвижности этого механизма по формуле Чебышева:  Несмотря на то, что механизм достаточно простой, кинематика движения его звеньев выглядит не вполне понятной. Причиной тому является наличие двухподвижной пары 4-го класса. Преобразуем механизм в кинематически эквивалентный заменяющий. Учитывая, что расстояния Рис.2.3 можно заменить кинематической цепью Н  а рис.2.4 приведен пример замены механизма с высшей парой заменяющим кулисным. Проверку степени подвижности исходного механизма и заменяющего предлагаем выполнить самостоятельно. а рис.2.4 приведен пример замены механизма с высшей парой заменяющим кулисным. Проверку степени подвижности исходного механизма и заменяющего предлагаем выполнить самостоятельно. Таким образом, любой плоский механизм, содержащий кинематические пары 4-го класса может быть заменен на кинематически эквивалентный заменяющий механизм с низшими парами 5-го класса. Вид заменяющего механизма определяют по правилам, изложенным в книге [1], §10. Рис.2.4 Следует знать, что кинематическая эквивалентность обеспечивается только для конкретных положений заменяемого и заменяющего механизмов. Поэтому такие механизмы еще называют мгновенно кинематически эквивалентными. Как видно из приведенных примеров, полученный при замене кинематически эквивалентный механизм не является эквивалентным по структуре. Структурные изменения, происходящие в заменяющем механизме, подчиняются закону (2.4): 1 к/п 4-го класса → 2 к/п 5-го класса + 1 звено (2.4) Структурные группы Л.В.Ассура. Классификация структурных групп Как было показано в п.2.3, плоский механизм с высшими парами 4-го класса может быть преобразован в кинематически эквивалентный механизм с парами 5-го класса. Структурная формула для заменяющего механизма получит вид: Присутствие в механизме однотипных кинематических пар 5-го класса позволяет создать общую идеологию построения и структурной классификации всех плоских механизмов. Данная задача была выполнена Л.В.Ассуром 1 в классическом труде «Исследование плоских стержневых механизмов с низшими парами с точки зрения их структуры и классификации».2 Для понимания принципов классификации механизмов введем понятие «структурная группа». Рассмотрим кинематическую цепь, изображенную на рис.2.5,а. Цепь состоит из звеньев 1 и 2, образующих между собой вращательную кинематическую пару. Эту кинематическую пару будем называть внутренней. Свободными концами звенья входят в кинематические пары с другими звеньями механизма (показаны пунктиром). Эти пары для рассматриваемой цепи будем считать внешними. Все кинематические пары – вращательные пары 5-го класса. Требуется определить степень подвижности данной кинематической цепи. 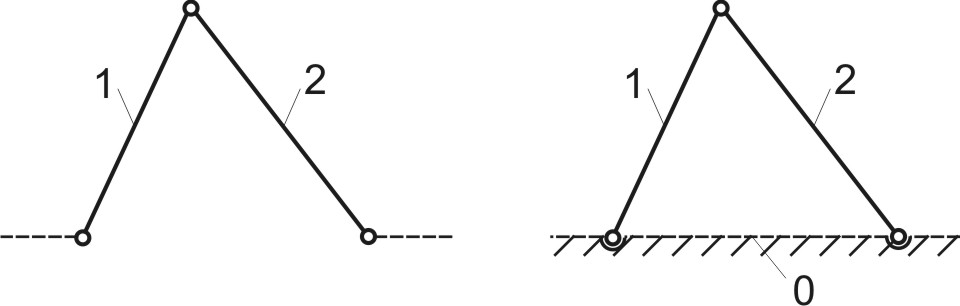 а) б) Рис.2.5 Один из способов решения задачи заключается в мысленном присоединении рассматриваемой цепи к механизму с известной степенью подвижности (рекомендуется в [1-3]). Присоединение осуществляется элементами внешних кинематических пар. Степень подвижности вновь образованного механизма должна увеличиться на величину, равную степени подвижности исследуемой цепи звеньев. Другим, более простым способом решения той же задачи является мысленное присоединение рассматриваемой цепи к одному, условно неподвижному звену - стойке с W=0. Как и в предыдущем случае, это присоединение осуществляется элементами внешних пар. Учитывая, что стойка имеет нулевую подвижность, степень подвижности всей цепи звеньев (включая стойку) автоматически покажет степень подвижности исследуемой кинематической цепи. Применяя второй из описанных способов, мысленно присоединим исследуемую кинематическую цепь к стойке 0 (Рис.2.5,б) и вычислим степень подвижности полученной замкнутой цепи звеньев по формуле Чебышева: Результат свидетельствует о том, что при показанном соединении со стойкой кинематическая цепь звеньев 1 и 2, двигаться относительно стойки не может, т.е. обладает относительно нее нулевой степенью подвижности.3 Структурной группой (группой Ассура) называют кинематическую цепь с нулевой степенью подвижности относительно звеньев, к которым она присоединена, и которая не может быть разделена на более простые кинематические цепи с нулевой степенью подвижности [1, 2]. В литературе можно встретить и другое определение, близкое по своей сути к первому. Структурной группой называется кинематическая цепь, присоединение которой к механизму не изменяет число его степеней подвижности, причем группа не должна распадаться на более простые кинематические цепи, удовлетворяющие этому условию [2, 3]. Таким образом, при структурном анализе механизмов и выявлении структурных групп должны быть проверены два условия: Степень подвижности выделенной кинематической цепи (предположительно – структурной группы) после присоединения к стойке элементами внешних пар должна быть W=0. Выделенная кинематическая цепь (предположительно – структурная группа) не должна распадаться на более простые цепи с W=0. Структурной группой (группой Ассура) считают кинематическую цепь, удовлетворяющую обоим условиям одновременно. Для иллюстрации важности второго условия приведем пример (см. Задачу ниже). Задача. Дано: На рис.2.6,а изображена кинематическая цепь, состоящая из 4-х звеньев. Требуется: Выяснить, является ли данная цепь структурной группой Ассура?  а) б) Рис.2.6 Решение. 1. Проверяем степень подвижности цепи. Для этого мысленно присоединим цепь к стойке элементами внешних кинематических пар и применим формулу Чебышева. Получим: n = 4 , p5 = 6 и Первое условие существования группы Ассура выполнено. 2. Проверяем возможность разделения исследуемой цепи на более простые цепи с W=0. Такая возможность существует. Исходная цепь может быть разобрана на две цепи с W = 0 (Рис.2.6,б). Ответ. Исходная кинематическая цепь не является структурной группой. Для выявления и классификации структурных групп выясним вопрос о вероятных сочетаниях числа звеньев и числа кинематических пар в различных структурных группах. Для этого используем формулу Чебышева для механизмов с парами 5-го класса, подставив в нее условие W=0. Получим: Отсюда следует: и возможные сочетания Таблица 2.1
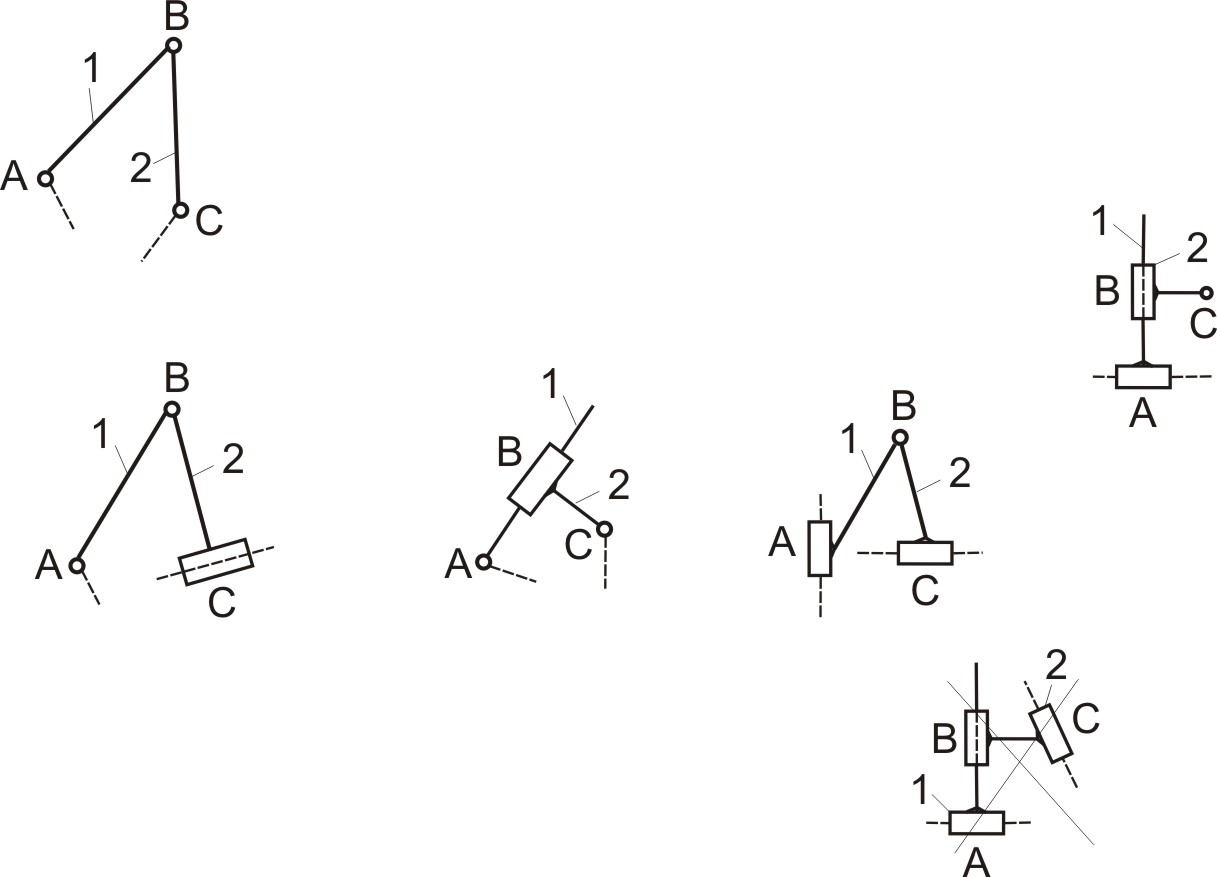
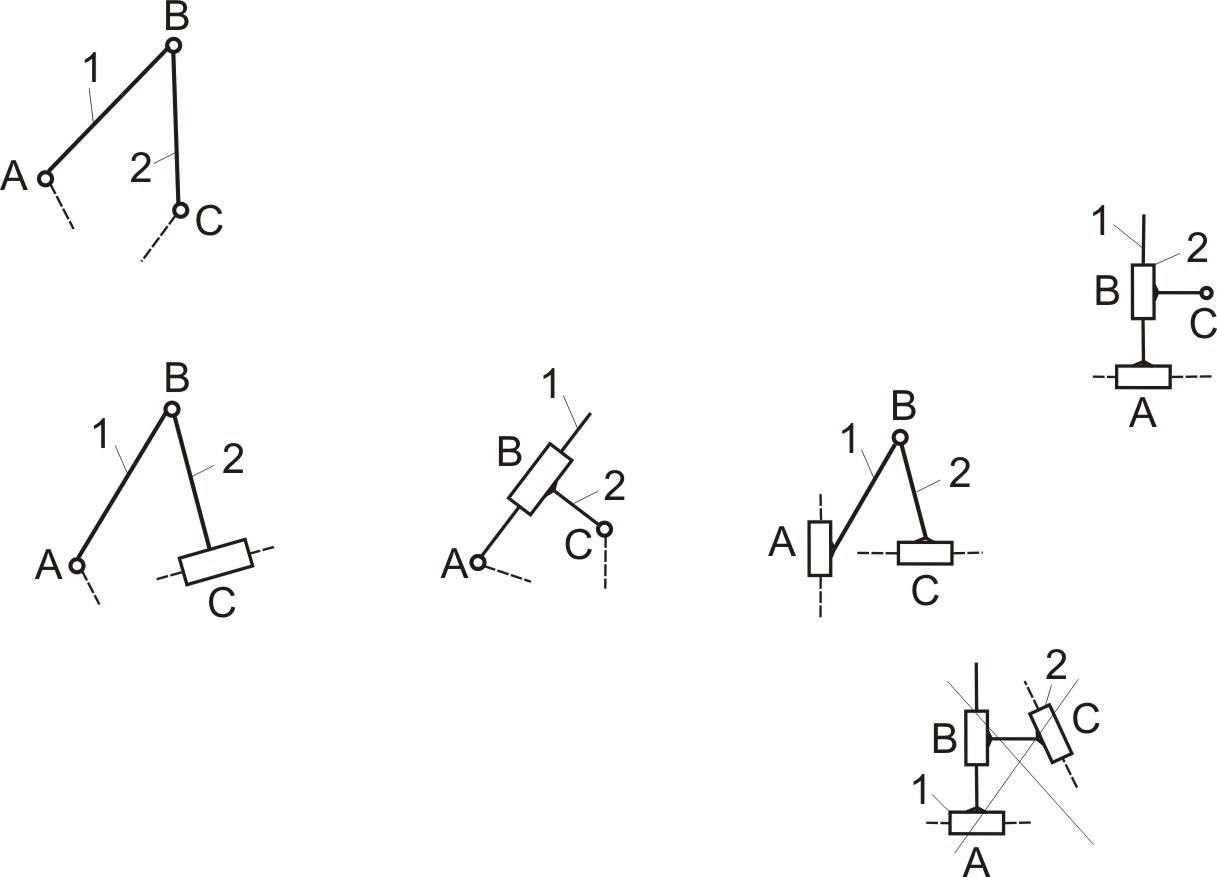
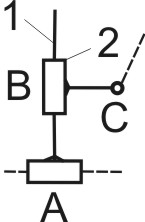
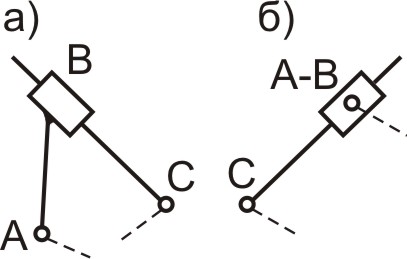
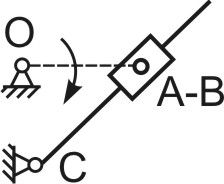
Из таблицы видно, что самая простая структурная группа имеет Таблица 2.2 Виды двухповодковых структурных групп (диад)
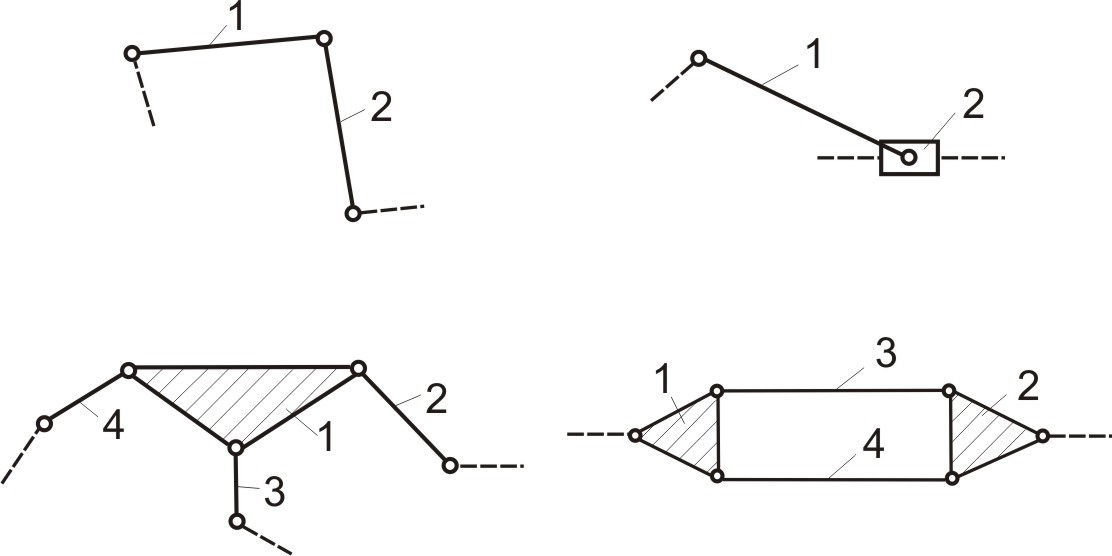
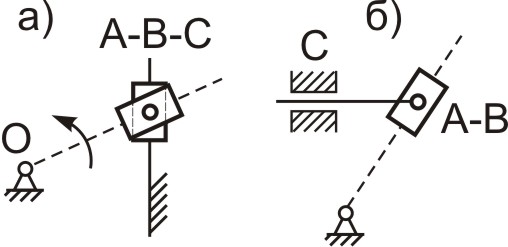
Диада 6-го вида, с тремя поступательными кинематическими парами, в таблице 2.2 намерено перечеркнута. Это означает, что она не существует. В этом можно убедиться, присоединив данную кинематическую цепь элементами внешних пар к стойке и применив структурную формулу Добровольского для механизмов с поступательными парами: Из формулы следует, что присоединенная кинематическая цепь не имеет необходимой для структурной группы нулевой степени подвижности. Следовательно, группой Ассура она не является. Группы Ассура классифицируют по классам и порядкам. Класс группы Ассура, по предложению И.И.Артоболевского1, определяется числом кинематических пар, образующих в группе наиболее сложный замкнутый контур [1, 2]. Исключение составляют двухповодковые структурные группы, не имеющие замкнутых контуров и отнесенные условно к группам II класса. Порядок структурной группы определяется числом элементов звеньев, которыми группа подсоединяется к основному механизму [1, 2]. Для закрепления материала, приведем несколько примеров. На рис.2.7 изображены структурные группы с указанием их класса и порядка. Проверьте себя, определив степень подвижности, класс и порядок структурных групп самостоятельно.
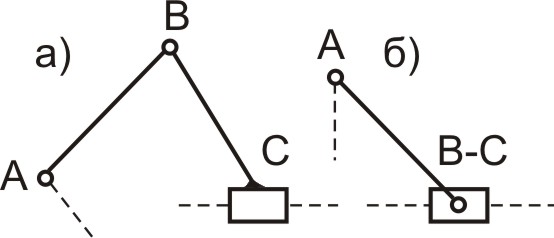
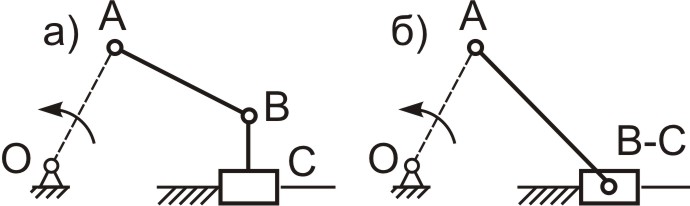
Рис.2.7 Принцип образования механизмов. Класс механизма. Формула строения механизма. Разработанная Л.В.Ассуром структурная классификация плоских рычажных механизмов позволяет сформулировать единый принцип образования рычажных механизмов любой сложности. Суть этого принципа удобно показать на примере образования условного механизма с W= 1, в состав которого входят только двухповодковые структурные группы. В этом случае, механизм можно образовать за несколько этапов: 1-й этап Создание первичного механизма (А). Первичный механизм 1 создается присоединением к стойке первого подвижного звена 2. Это звено и стойка образуют кинематическую пару 5-го класса, поэтому степень подвижности первичного механизма будет равна W= 3 · 1 – 2 · 1 = 1. 2-й этап Присоединение к первичному механизму (А) первой структурной группы. Присоединение осуществляют элементами внешних пар по правилу - один из поводков группы присоединяют к начальному звену первичного механизма, а другой – к стойке. Полученная система звеньев образует механизм (Б) более сложной (по сравнению с первичным механизмом) структуры. 3-й и последующие этапы (если они требуются) Последовательное присоединение к механизму (Б) других структурных групп и образование механизмов (В), (Г) и т.д. Группы могут присоединяться к любым, но разным звеньям. Присоединение обоих поводков групп к одному звену не допускается 1. Применив формулу Чебышева, можно убедиться, что степень подвижности механизма на любом из этапов его создания всегда остается неизменной и равной W= 1. Из представленного алгоритма следует, что начальное звено первичного механизма при последующем наслоении структурных групп становится входным звеном все более усложняющегося механизма. Кроме того, в силу нулевой степени подвижности структурных групп, степень подвижности механизма до и после подсоединения групп является неизменной. Принцип образования механизмов с W= 2 и более остается таким же. Следует только учитывать, что число первичных механизмов всегда должно соответствовать W. Зная принцип образования механизмов, легко понять принцип их разборки. Он заключается в последовательном отделении структурных групп. После отделения последней, должны остаться один или несколько первичных механизмов. Класс механизма определяется наивысшим классом структурной группы, входящей в состав механизма. Формула строения механизма – это формула, показывающая, в какой последовательности к первичному механизму подсоединяются те или иные структурные группы. Формула строения записывается с указанием класса структурных групп. Примеры формул приведены на рис.2.8. В завершении раздела, посвященного принципам построения механизмов, уместно привести примеры простых механизмов, образованных двухповодковыми структурными группами различных видов (модификаций). Таблица 2.3 Виды двухповодковых структурных групп и механизмы, созданные на их основе
Таблица 2.3 (продолжение)
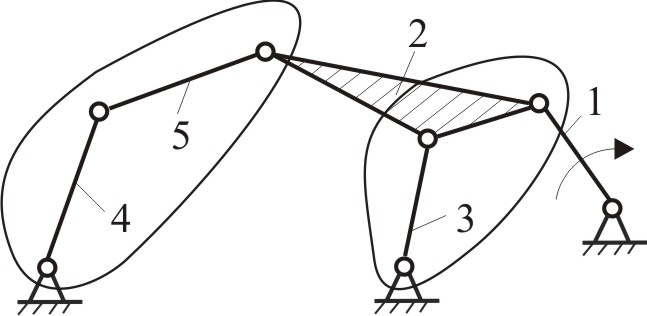
Порядок структурного анализа Изложенные выше сведения позволяют выполнить структурный анализ механизма. Процедура структурного анализа включает решение следующих задач: Определение степени подвижности механизма. Условное разделение механизма на структурные группы и первичный механизм. Определение класса структурных групп. Составление формулы строения механизма. Определение класса механизма. Примечание. Выполнение структурного анализа, как правило, предшествует кинематическому и динамическому расчету. Это делается не случайно. Результаты структурного анализа дают ключ к пониманию основных принципов решения задач кинематики и динамики механизмов. Так, например, степень подвижности и класс механизма заранее говорят о трудоемкости будущего решения. Формула строения механизма предопределяет последовательность кинематического анализа и силового расчета. 1 Для закрепления материала приведем примеры структурного анализа механизмов, изображенных на рис.2.8, а, б. Входное звено обоих механизмов – кривошип 1. Для каждого случая определена степень подвижности, выделены структурные группы, приведена формула строения механизма и определен его класс.
Рис.2.8 Задание для самостоятельного решения. Используя теоретический материал лекции 2, выполнить структурный анализ механизмов, изображенных на рис.2.8, а, б , при условии, что: входным звеном механизма (Рис.2.8, а) является ползун 5; входным звеном механизма (Рис.2.8, б) является звено 4. Вопросы для самоконтроля Объясните смысл задачи структурного анализа механизма. Что должно быть заданным, а что подлежит определению? Что такое структурная (принципиальная) схема механизма? Для решения какой задачи ее используют? В чем ее отличие от кинематической схемы? Какой параметр называется «обобщенной координатой»? Приведите пример. Степень подвижности каких механизмов определяют по формуле Чебышева? Напишите эту формулу и объясните смысл входящих в нее величин. Что называется структурной группой Л.В.Ассура? Какая структурная группа называется «диадой»? Как определяется класс и порядок структурных групп? Приведите примеры. Сформулируйте принцип образования рычажных механизмов. Что показывает формула строения механизма? Как определяют класс механизма? Изменяется ли степень подвижности и класс механизма в зависимости от выбора входного звена? Назовите пункты структурного анализа механизма. Лекция 3 структурный и метрический синтез плоских рычажных механизмов Плоские рычажные механизмы. Достоинства и недостатки низших и высших кинематических пар. ([1], §8, п.1; [2], §2.2 - 2.3) Задачи структурного и метрического синтеза. ([2], §2.5) Критерий существования кривошипа. ([2], §11.1) Критерий положений ведомого звена. ([2], §11.2) Критерий максимального угла давления. ([2], §11.1 – 11.2) Критерий отношения средних скоростей ведомого звена. ([2], §11.4) Метрический синтез сложного механизма. ([1], §26) Плоские рычажные механизмы. Достоинства и недостатки низших и высших кинематических пар. |