ворд. Документ Microsoft Word. Литература по теме Тема Основы системного анализа Вопрос Системный подход и системный анализ
 Скачать 0.56 Mb. Скачать 0.56 Mb.
|

|
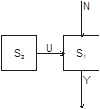
Тема 7. Управление в сложных системах Цели изучения темы: · изучить концепцию и принципы управления в сложных системах. Задачи изучения темы: · изучить понятие управления; · выяснить необходимость управления; · познакомиться с основными законами и принципами управления; · изучить основы построения систем управления в организационно-технических структурах. Успешно изучив тему, Вы: Получите представление о: · функции управления; · целях управления; · задачах и этапах управленческого процесса в организационно-технических структурах. Будете знать: · закон необходимого разнообразия; · типы систем с управлением; · типах организационных структур. Вопросы темы: 1. Понятие управления. 2. Типы систем с управлением. 3. Закон необходимого разнообразия. 4. Структуры организационно-технического управления. 5. Процесс управления в организационных структурах. Вопрос 1. Понятие управления. Замкнутые системы развиваются в направлении достижения устойчивого состояния равновесия, которое зависит только от начальных условий системы. Если изменятся начальные условия, то изменится и конечное устойчивое состояние. Однако в открытых системах, в которых значительно взаимодействие с внешней средой, для достижения устойчивого состояния необходимо предпринимать определенные действия. Совокупность этих действий образует функцию управления. Под управлением в широком смысле понимается совокупность действий, направленных либо на достижение стабильного функционирования некоторого объекта, выражающегося в сохранении некоторой совокупности свойств объекта, которые подвергаются возмущающим воздействиям со стороны внешней среды, либо на достижение определенной цели функционирования, когда объект переходит в требуемое (целевое) состояние. Управление должно обеспечивать достижение цели протекания процессов преобразования энергии, вещества и информации, поддержания оптимальной работоспособности и безаварийности функционирования системы путем сбора и обработки информации о ее состоянии и состоянии внешней среды, выработки решений о воздействии на систему и их исполнении. Систему, в которой реализуется функция управления, называют системой управления и выделяют в ней управляющую систему, которая осуществляет функцию управления, и управляемую систему, представляющую собой объект управления. В сложных системах указанное разделение в ряде случаев можно провести только на концептуальном уровне, так как эти подсистемы могут представлять собой единое целое. Режим функционирования таких систем называют саморегулированием. В зависимости от характера элементов, образующих систему, принято выделять три типа систем с управлением: · технические системы управления; · организационные (социальные) системы управления; · организационно-технические (комплексные) системы управления. Общая структурная схема системы с управлением может быть представлена в виде рис 14. 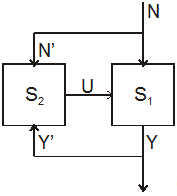 Рис. 14. Структура системы с управлением здесь – объект управления (управляемая система); N – информация о состоянии внешней среды (внешние воздействия на объект управления); N' – информация о состоянии внешней среды, передаваемая в управляющую систему; U – командная информация; Y – информация о состоянии объекта управления; Y′ – информация о состоянии объекта управления, передаваемая в управляющую систему. Управляющая система в целом необходима для достижения одной из двух глобальных целей: · Сохранения стабильного функционирования системы при изменениях внешней среды. Примерами могут служить система кондиционирования воздуха в помещении или автопилот воздушного судна. · Перевода системы в заданное целевое состояние. Примером может быть подсистема наведения на цель системы противоракетной обороны. Объект управления является исполнительным инструментом, реализующим основную функцию системы. Система связи обеспечивает обмен информацией между управляющей системой и объектом управления. Задачами проектирования системы с управлением, таким образом, являются синтез структуры и параметров: · объекта управления, соответствующего цели (закону функционирования) создаваемой системы с управлением; · управляющей системы, т.е. построение структуры управления с учетом ограничений по затратам различного вида (численность управленческого персонала и др.); определение мест размещения центров обработки информации; определение массивов информации, подлежащих передаче, хранению и обработке; · системы связи. Вопрос 2. Типы систем с управлением. В зависимости от конкретных значений параметров общей структуры систем с управлением, показанной на рис. 14, системы управления можно классифицировать по следующим типам.
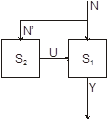
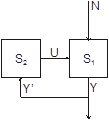
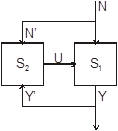
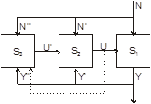
Системы с управлением, относящиеся к типам 1 – 3, называются разомкнутыми, так как в управляющих системах отсутствует информация о состоянии объектов управления. Остальные системы называются замкнутыми. Рассмотрим типы систем подробнее. В системах типа 1реализуетсязадача управления по программе. Такое управление заключается в жестком выполнении заранее составленной и введенной в систему последовательности управляющих воздействий , Для повышения эффективности управления при изменениях внешней среды в разомкнутых системах используется способ, основанный на компенсации действия возмущений на управляемые объекты. При управлении по возмущениям в системах типов 2 и 3 управляющая система производит измерения возмущений и с их учетом формирует управляющие воздействия. В зависимости от полноты информации о внешней среде системы управления по возмущениям могут обладать важным свойством: управление по возмущениям с полной информацией обеспечивает полную компенсацию воздействий внешней среды. Системы, в которых достигается полная компенсация, называются инвариантными. В них управляющее воздействие поступает в объект управления одновременно с воздействием внешней среды, нейтрализуя его. Однако в открытых системах предусмотреть все возможные возмущения трудно. Например, невозможно заранее предугадать тип вирусной атаки для ее немедленного отражения. Кроме того, функциональные зависимости между возмущающими и управляющими воздействиями могут быть неизвестны. Поэтому управление по возмущениям с неполной информацией приводит к накоплению ошибок. Такие системы управления применяются, если диапазон изменений внешней среды ограничен. В остальных случаях применяется управление с обратной связью, как показано в таблице (типы 4-10). Эти системы позволяют реализовать принцип управления по состоянию. Благодаря обратной связи в управляющей системе имеется информация о состоянии объекта управления. На основе этой информации определяется отклонение текущего состояния объект управления от требуемого и вырабатывается управляющее воздействие в зависимости от задачи управления. В задачах стабилизации управление обеспечивает поддержание текущего состояния в заданных пределах изменения значений выходных переменных, например, напряжения в стабилизаторе напряжения или температуры тела, давления и состава крови в организмах теплокровных животных. В задачах слежения управление направлено на соблюдение соответствия между текущим состоянием системы с управлением и состоянием другой системы, изменения состояний которой заранее не известны, например, состояния радиолокатора в режиме сопровождения воздушной цели или режима и глубины дыхания живых организмов, которые отслеживают изменения физической нагрузки. К недостаткам замкнутых систем следует отнести их усложнение за счет введения каналов обратной связи и наличие неустранимого отклонения между фактическим и требуемым состоянием управляемых объектов, обусловленного тем, что управляющие воздействия вырабатываются только с появлением отклонений. Для ослабления влияния отклонений между фактическим и требуемым состоянием управляемых объектов при оперативном управлении в системах с неполной информацией может использоваться принцип необходимой иерархии. Он состоит в следующем:чем менее формализованы зависимости управляющих воздействий от возмущений среды или состояний объектов управления и чем больше неопределенность при принятии решений, тем более высокая иерархия необходима для управления. Из этого принципа следует, что недостаточные возможности управления можно до некоторой степени компенсировать с помощью построения управляющей системы в виде иерархической многоцелевой структурированной системы типа 10. Помимо уже использовавшихся , U, N, N′, Y, Y′ здесь также участвуют – управляющая система более высокого уровня иерархии, N» – информация о состоянии внешней среды, находящаяся в управляющей системе ; U’ -командная (управляющая) информация для системы , имеющаяся в системе Иерархические системы применяются там, где информация о состоянии, находящаяся в управляющей системе, не полностью соответствует реальному состоянию среды и объекта управления, число переменных и диапазоны изменений их значений велики, сами переменные могут быть как качественными, так и количественными, их взаимозависимости слабо формализованы и изменяются с течением времени. Это типично, например, для организационно-технических систем, где высокая неопределенность при принятии решений снижает возможности по оптимальному управлению. При этом управляющая система решает задачи оперативного управления (регулирования), как и в системах других типов. На систему возлагаются остальные функции управления, не связанные непосредственно с регулированием. Например, целеполагание, прогнозирование, планирование. Подобные системы рассматриваются как системы, принимающие решения. Элементы и С другой стороны, элементы и являются соответственно обучающимися и обучающими. Цель заключается в получении требуемой реакции (состояний переменных во множестве Y) на отдельные раздражители (состояния переменных во множестве N), которые рассматриваются (определены) как правильные. Можно описать и некоторые другие интерпретации целенаправленной системы с управлением, например, системы, корректирующие ошибки, адаптивные или самоорганизующиеся системы. Вопрос 3. Закон необходимого разнообразия. Закон необходимого разнообразия Эшби утверждает, что для управления системой управляющий орган должен быть способным к восприятию по крайней мере того же количества различных сигналов, какое может появиться на выходе управляемой им системы. В любой ситуации, участниками которой являются управляющий орган и управляемая им система, индивидуум имеет в своей памяти набор возможных действий, ответных на действия системы. Сложность системы может быть оценена по количеству различных состояний, в которых она может находиться. О сложности можно судить по числу комбинаций переменных (или свойств), определяющих процесс. Таким образом, если процесс зависит от значения единственной переменной, сложность определяется лишь количеством значений, принимаемых этой переменной. По мере увеличения числа переменных растет и сложность самой системы. Управление предполагает наличие возможности учесть все разнообразие состояний системы. Конечная цель при этом состоит в выборе подходящего набора параметров системы для ее количественного описания. Управляющий орган должен подобрать надлежащую реакцию на каждый сигнал, получаемый им от системы. Уменьшению сложности системы может способствовать выявление управляющих параметров и их использование для управления системой. С другой стороны, сделать систему управляемой может уменьшение ее сложности. Управление заключается в ограничении разнообразия состояний управляемого объекта. Это означает, что энтропия объекта управления должна быть равна нулю Если управляемый объект характеризуется одним показателем качества и может находиться в nсостояниях  Для оценки состояний объекта, характеризуемого m показателями, качества требуется провести суммирование по j, Энтропия является мерой первоначальной неопределенности состояния объекта управления. Чем больше число различных состояний объекта и чем меньше отличаются друг от друга их вероятности, тем больше энтропия объекта управления. Нетрудно показать, что при n равновероятных состояниях значение энтропии будет максимальным: Если число возможных состояний системы равно n, то общее количество (мера) разнообразия системы равно Пусть управляемая система обладает разнообразием , а управляющая – . Цель управляющей системы – уменьшить значение за счет изменения . В свою очередь, изменение , как правило, влечет изменение , а именно, управляющая система может эффективно выполнять присущие ей функции управления лишь при условии, если верно неравенство Согласно данному принципу с увеличением сложности объекта управления сложность управляющей системы должна увеличиваться. Для реализации эффективного управления управляющая система должна обладать возможно более точной и полной информацией об управляемом объекте и внешней среде. Таким образом, для достижения возможности полного управления системой управляющий орган должен иметь: 1) по крайней мере, столько же различных возможных действий, как и управляемая система (альтернативой является более высокое быстродействие органа по сравнению с управляемой системой); 2) абсолютно точный набор возможных действий, являющийся подмножеством множества всех возможных ответов на действия системы (в каком-то смысле наилучший набор ответов); 3) возможность производить ответные действия (соответствующие им коды) со скоростью не ниже скорости работы управляемой системы. Вопрос 4. Структуры организационно-технического управления. В организационно-технических системах принято выделять следующие элементы структуры. |