КОНТРОЛЬНЫЕ ЗАДАНИЯ С ПРИМЕРАМИ _ТерМех. Методические указания и контрольные задания для студентовзаочников технических специальностей высших учебных заведений
 Скачать 2.5 Mb. Скачать 2.5 Mb.
|

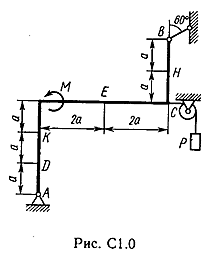
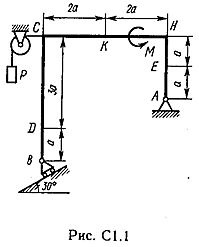
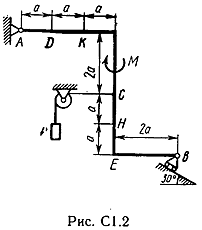
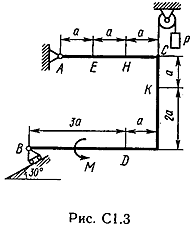
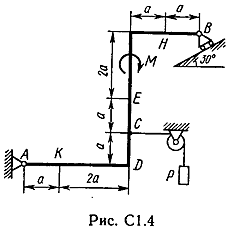
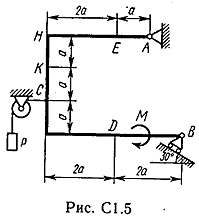
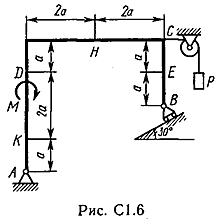
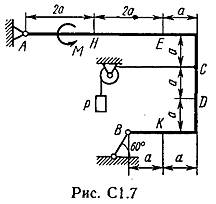
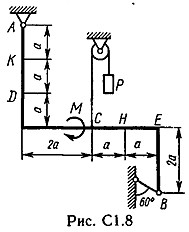
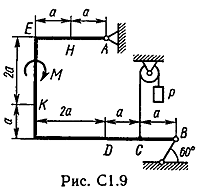
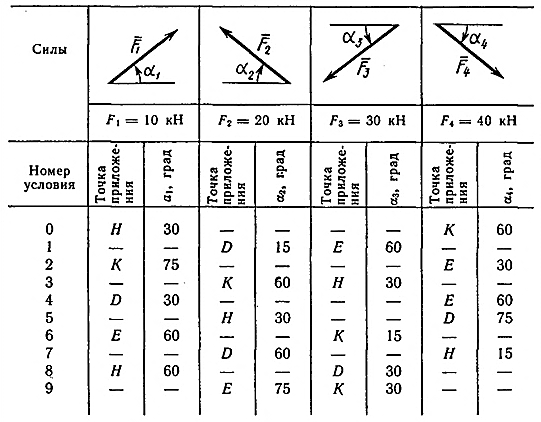
Задача С 1. Определение реакций связейЖесткая рама, расположенная в вертикальной плоскости (рис. С 1.0 – С 1.9, табл. С 1), закреплена в точке А шарнирно, а в точке В прикреплена или к невесомому стержню с шарнирами на концах, или к шарнирной опоре на катках. В точке С к раме привязан трос, перекинутый через блок и несущий на конце груз весом Р = 25 кН. На раму действуют пара сил с моментом М = 100 кНм и две силы, значения, направления и точки приложения которых указаны в таблице. Определить реакции связей в точках А, В, вызываемые действующими нагрузками. При окончательных расчетах, принять, а = 0,5 м.
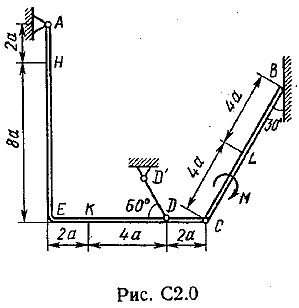
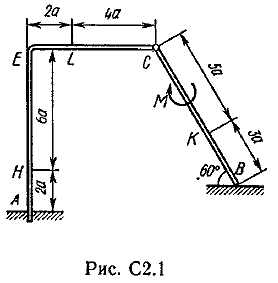
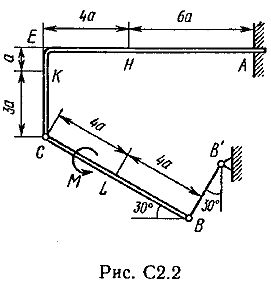
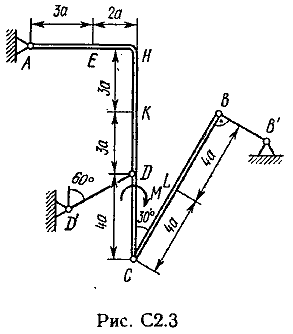
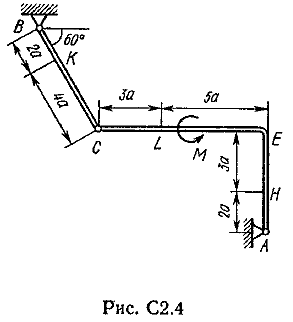
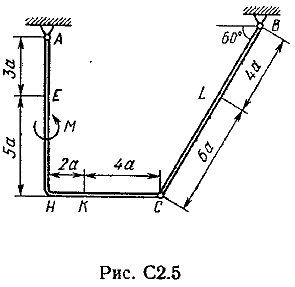
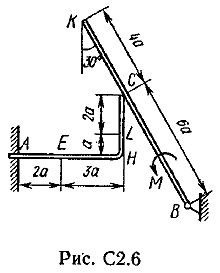
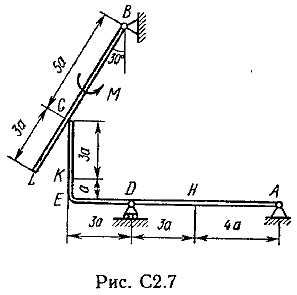
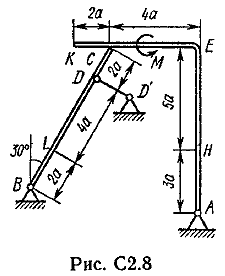
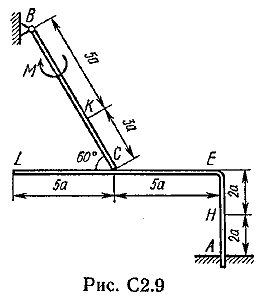
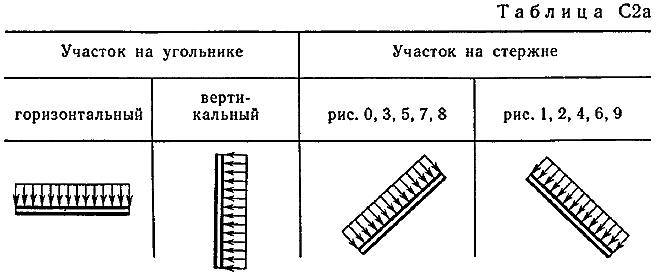
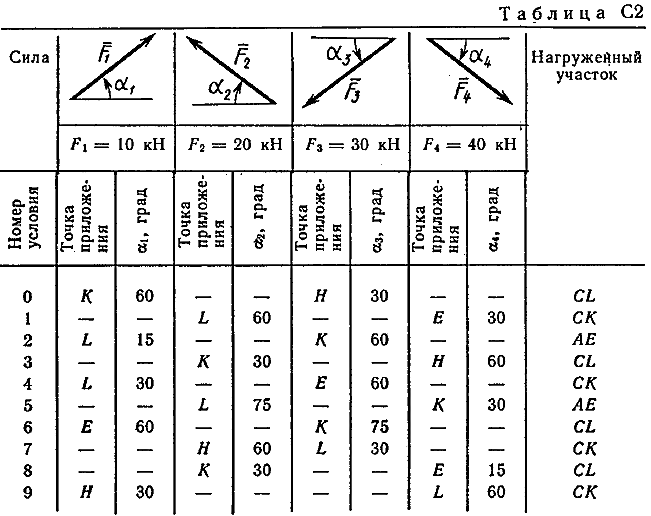
Пример C1. Жесткая пластина ABCD имеет в точке А неподвижную шарнирную опору, а в точке В подвижную шарнирную опору на катках. 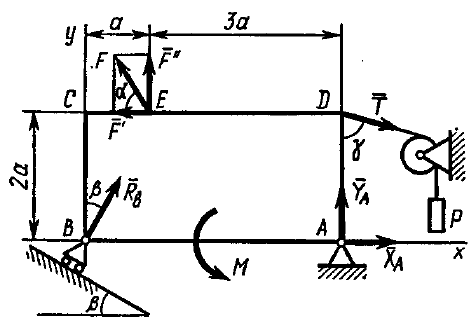 F = 25 кН, = 60°, Р = 18 кН, γ = 75°, М = 50 кН·м, β = 30°, а = 0,5 м. Определить: реакции в точках А и В. Решение. 1. Рассмотрим равновесие пластины. Заменим связи соответствующими реакциями: натяжение троса Т (по модулю Т = Р); шарнирно-неподвижную опору А двумя составляющими –ХА, YA, ; шарнирно-подвижную опору – RB. 2. Для плоской произвольной системы сил составим три уравнения равновесия.  ; ; ; ; Подставив в составленные уравнения, числовые значения заданных величин и решив эти уравнения, определим искомые реакции: ХА= –8,5 кН; YА= –23,3 кН; RВ= 7,3 кН. Знаки указывают, что силы ХАи YА направлены противоположно показанным на рис. С 1. После нахождения реакций связей необходимо выполнить проверку с помощью другого уравнения равновесия. Например, определить сумму моментов всех сил относительно точки С. Если равенство окажется равным нулю, то значения найденных реакций, определены, верно.  . .Задача С 2. Определение реакции связей составной конструкции Конструкция состоит из жесткого угольника и стержня, которые в точке С или соединены друг с другом шарнирно (рис. С 2.0 – С 2.5), или свободно опираются друг о друга (рис. С 2.6 – С 2.9). Внешними связями, наложенными на конструкцию, являются в точке А или шарнир, или жесткая заделка; в точке В или гладкая плоскость (рис. 0 и 1), или невесомый стержень ВВ' (рис. 2 и 3), или шарнир (рис. 4–9); в точке Dили невесомый стержень DD' (рис. 0, 3, 8), или шарнирная опора на катках (рис. 7). На каждую конструкцию действуют: пара сил с моментом М=60 кНм, равномерно распределенная нагрузка интенсивности q=20 кН/м и еще две силы, их направления и точки приложения указаны в табл. С 2; там же в столбце «Нагруженный участок» указано, на каком участке действует распределенная нагрузка (например, в условиях № 1 на конструкцию действуют сила F2 под углом 60° к горизонтальной оси, приложенная в точке L, сила F4под углом 30° к горизонтальной оси, приложенная в точке Е, и нагрузка, распределенная на участке СК). Определить реакции связей в точках А, В, С (для рис. 0, 3, 7, 8 еще и в точке D), вызванные заданными нагрузками. При окончательных расчётах, принять, а=0,2 м. Направление распределенной нагрузки на различных по расположению участках указано в табл. С 2а.
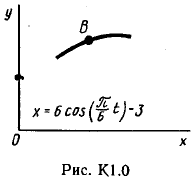
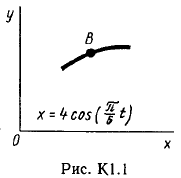
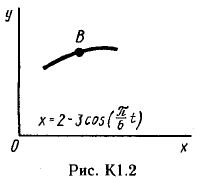
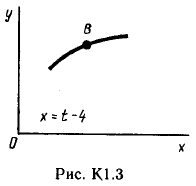
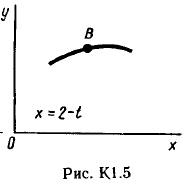
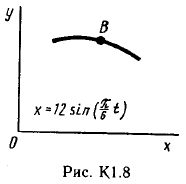
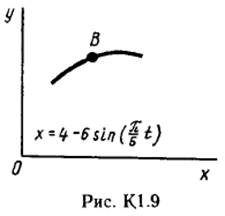
 Пример С 2. На угольник ABC ( АВС=90°), конец А которого жестко заделан, в точке С опирается стержень DE(рис. С 2, а).Стержень имеет в точке Dнеподвижную шарнирную опору и к нему приложена сила F, а к угольнику – равномерно распределенная на участке KBнагрузка интенсивности qи пара с моментом М. 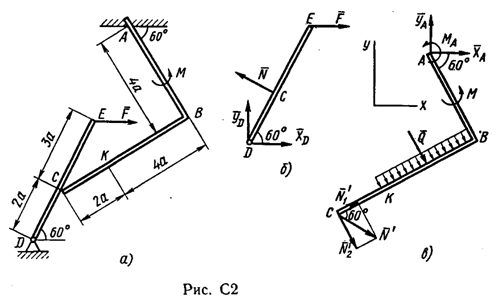 Дано: F=10 кН, М=5 кНм, q=20 кН/м, а=0,2 м. Определить: реакции в точках А, С, D, вызванные заданными нагрузками. Решение. 1. Для определения реакций расчленим систему и рассмотрим сначала равновесие стержня DE(рис. С 2, б). Проведем координатные оси ХYи изобразим действующие на стержень силы: силу F, реакцию N, направленную перпендикулярно стержню, и составляющие XDи YDреакции шарнира D. Для полученной плоской системы сил составляем три уравнения равновесия:  ; ; ; ; . .2. Рассмотрим равновесие угольника (рис. С 2, в).На него действуют сила давления стержня N', направленная противоположно реакции N, равномерно распределенная нагрузка, которую заменяем силой Q, приложенной в середине участка KB(численно Q=q·4a=16 кН), пара сил с моментом М и реакция жесткой заделки, слагающаяся из силы, которую представим составляющими ХА, YА, и пары с моментом МА. Для этой плоской системы сил тоже составляем три уравнения равновесия:  ; ; ; ; . .При вычислении момента силы N' разлагаем её на составляющие N/1и N/2и применяем теорему Вариньона. Подставив в составленные уравнения числовые значения заданных величин и решив систему уравнений, найдем искомые реакции. При решении учитываем, что численно N'=N всилу равенства действия и противодействия. Ответ: N= 21,7 кН, YD= –10,8 кН; XD= 8,8 кН, ХА= –26,8 кН, YA= 24,7 кН, МА= 42,6 кНм. Знаки указывают, что силы YD, ХАи момент МАнаправлены противоположно показанным на рисунках. Задача К 1. Определение скорости и ускорения точки по заданным уравнениям движения. Задача К 1а. Точка В движется в плоскости ху (рис. К 1.0 – К 1.9, табл. К 1; траектория точки на рисунках показана условно). Закон движения точки задан уравнениями: х=f1(t), у=f2(t), где х и у выражены в сантиметрах, t – в секундах. Найти уравнение траектории точки; для момента времени t1=1 с, определить скорость и ускорение точки, а также её касательное и нормальное ускорения и радиус кривизны в соответствующей точке траектории. Зависимость х=f1(t) указана непосредственно на рисунках, а зависимость у=f2(t) дана в табл. К 1 (для рис. 0-2 в столбце 2, для рис. 3-6 в столбце 3, для рис. 7-9 в столбце 4). Как и в задачах C 1С 4, номер рисунка выбирается по предпоследней цифре шифра; а номер условия в табл. К 1-по последней. Задача К 1б. Точка движется по дуге окружности радиуса R=2м по закону s=f(t), заданному в табл. К 1 в столбце 5 (s– в метрах, t – в секундах), где s=AM – расстояние точки от некоторого начала А, измеренное вдоль дуги окружности. Определить скорость и ускорение точки в момент времени t1=1 с. Изобразить на рисунке векторы υ и , считая, что точка в этот момент находится в положении М, а положительное направление отсчета sот А к М. 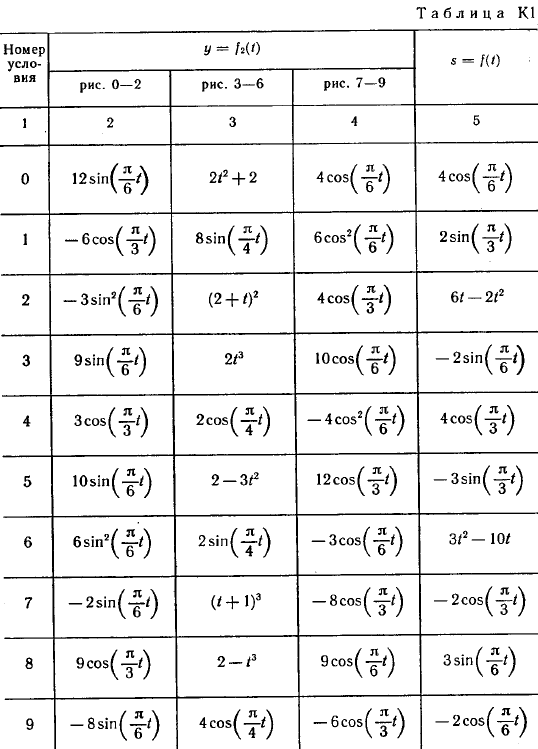
Пример К 1а. По заданным уравнениям движения точки М в координатной форме определить: траекторию её движения в заданный момент времени t=1c, найти скорость и ускорение.  (см), (см), (см). (см).Решение: 1. Определим траекторию движущейся точки М. Для получения уравнения траектории движущейся точки исключим из заданных уравнений параметр времени t:  , , . .Полученные уравнения возведем в квадрат и суммируем:  . .Таким образом,  . .Данное выражение представляет собой траекторию движущейся точки М – уравнение эллипса с центром в точке с координатами (9; -4). Построим траекторию в координатных осях ху (рис.9). Укажем положение точки М на траектории в заданный момент времени, для этого подставим время t=1с, в уравнения:  см, см, см. см.Тогда точка М с координаты (12; -1,4). Для указания положительного отсчета по траектории определим положение точки М в начальный момент времени при t=0 с.  см, см, см. см.Тогда точка М0 имеет координаты (15; - 4). Точки М и М0 принадлежат траектории эллипса, следовательно, решение верно. Направление положительного отсчета по траектории идёт от точки М0 в момент времени t=0 c, к точке М, когда t=1 с (против движения часовой стрелки). 2. Определим скорость точки М в заданный момент времени t. Известно, что скорость можно разложить по проекциям на координатные оси:  . .Определим проекцию скорости точки М на ось Ох:  . .В заданный момент времени t=1 с, проекция скорости составит:  см/с. см/с.Так, как Vx= 10,9<0, то вектор скорости  направлен из точки М параллельно оси Ох в сторону отрицательных значений х, данный вектор требуется отложить в соответствующем масштабе скоростей, указанных на схеме. направлен из точки М параллельно оси Ох в сторону отрицательных значений х, данный вектор требуется отложить в соответствующем масштабе скоростей, указанных на схеме. Определим проекцию скорости точки М на ось Оу:  . .В заданный момент времени t=1 с, проекция скорости составит:  см/с. см/с.Так, какVy=3,14>0, то вектор скорости  направлен из точки М параллельно оси Оу в сторону положительных значений у, данный вектор требуется отложить в том же масштабе, что и вектор . направлен из точки М параллельно оси Оу в сторону положительных значений у, данный вектор требуется отложить в том же масштабе, что и вектор .Геометрическая сумма векторов и (по правилу параллелограмма) представляет собой вектор скорости  точки М в заданный момент времени, этот вектор должен быть направлен по касательной τ к траектории движения (рис.10). Численное значение скорости можно измерить, согласно указанному масштабу для векторов скоростей, либо определить по теореме Пифагора (так как вектора точки М в заданный момент времени, этот вектор должен быть направлен по касательной τ к траектории движения (рис.10). Численное значение скорости можно измерить, согласно указанному масштабу для векторов скоростей, либо определить по теореме Пифагора (так как вектора  и взаимно перпендикулярны): и взаимно перпендикулярны): см/с. см/с.3. Определим ускорение точки М в заданный момент времениt. Известно, что ускорение можно разложить по проекциям на координатные оси:  . .Определим проекцию ускорения точки М на ось Ох:  . .В заданный момент времени t=1с, проекция ускорения составит:  см/с2. см/с2.Так, как  <0, то вектор ускорения <0, то вектор ускорения  направлен из точки М параллельно оси Ох в сторону отрицательных значений х, данный вектор требуется отложить в соответствующем масштабе ускорений, указанного на схеме. направлен из точки М параллельно оси Ох в сторону отрицательных значений х, данный вектор требуется отложить в соответствующем масштабе ускорений, указанного на схеме.Определим ускорение скорости точки М на ось Оу:  . .В заданный момент времени t= 1с, проекция ускорения составит:  см/с2. см/с2.Так, как  <0, то вектор ускорения <0, то вектор ускорения  направлен из точки М параллельно оси Оу в сторону отрицательных значений у, данный вектор требуется отложить в том же масштабе, что и вектор . направлен из точки М параллельно оси Оу в сторону отрицательных значений у, данный вектор требуется отложить в том же масштабе, что и вектор .Геометрическая сумма векторов и (по правилу параллелограмма) представляет собой вектор ускорения  точки М в заданный момент времени: точки М в заданный момент времени: см/с2. см/с2.Определим касательное ускорение точки М в заданный момент времени t, зная проекции скорости и ускорения на оси координат:  см/с2. см/с2.Так, как  , то вектор ускорения , то вектор ускорения  направлен из точки М по касательной к траектории движения в сторону направления вектора скорости направлен из точки М по касательной к траектории движения в сторону направления вектора скорости  (движение точки будет ускоренным), данный вектор требуется отложить в масштабе ускорений. (движение точки будет ускоренным), данный вектор требуется отложить в масштабе ускорений.Определим нормальное ускорение точки М в заданный момент времени t, зная полное и касательное ускорения:  см/с2. см/с2.Вектор ускорения  направлен из точки М по нормали п к траектории движения к центру кривизны траектории, данный вектор требуется отложить в масштабе ускорений. направлен из точки М по нормали п к траектории движения к центру кривизны траектории, данный вектор требуется отложить в масштабе ускорений. Так, как векторная сумма ускорений  справедлива, то решение верно. справедлива, то решение верно.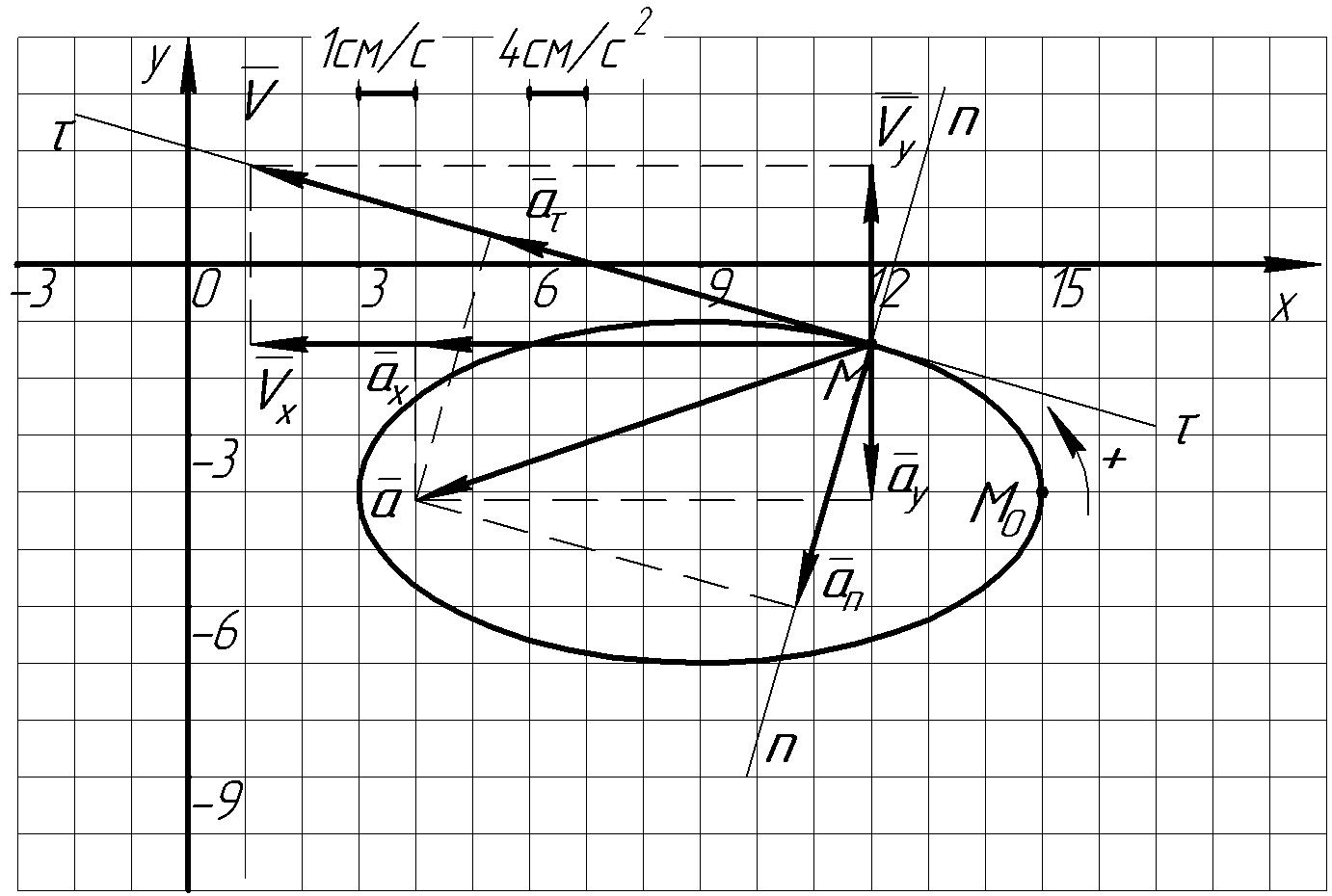 Определим радиус кривизны траектории  в заданный момент времени c учетом нормального (центростремительного) ускорения в заданный момент времени: в заданный момент времени c учетом нормального (центростремительного) ускорения в заданный момент времени: см. см. | ||||||||||||||||||||||||||||||||||||||||