тау. ТАУ МУПЗ 28.04.21. Методические указания к практическим занятиям для студентов СанктПетербург 2021 у дк 681 011
 Скачать 0.66 Mb. Скачать 0.66 Mb.
|

Практическое занятие № 6Определение качества линейных САРЦель задания: закрепить полученные знания по определению качества САР частотными методами Основные теоретические положения.Основными условиями работоспособности САР являются ее устойчивость и обеспечение необходимого качества процесса регулирования. Устойчивость является лишь необходимым, а не достаточным условием работоспособности САР. Анализ работоспособности системы определяется качеством процесса регулирования. Показателями качества САР называются величины, характеризующие поведение системы в переходном процессе при поступлении на ее вход единичного ступенчатого возмущающего или управляющего воздействия. Основные показатели качества переходных процессов приведены на рис. 6.1.  Рис. 6.1. Основные показатели качества САР переходных процессов: а) для статических объектов; б) для астатических объектов; 1. Максимальное динамическое отклонение регулируемого параметра  . Оно равно первому выбегу регулируемого параметра и зависит от динамических свойств объекта, вида возмущения, закона регулирования и параметров настройки регулятора. . Оно равно первому выбегу регулируемого параметра и зависит от динамических свойств объекта, вида возмущения, закона регулирования и параметров настройки регулятора.Следует отметить, что степень воздействия регулятора на отклонение регулируемого параметра при нанесении возмущения оценивается динамическим коэффициентом регулирования который может быть определен по формулам: а) для статических объектов  , (6.1). , (6.1).где  — отклонение регулируемого параметра при внесении возмущения, но при отсутствии регулятора; — отклонение регулируемого параметра при внесении возмущения, но при отсутствии регулятора; — коэффициент передачи объекта; — коэффициент передачи объекта;  — возмущение; — возмущение;б) для астатических объектов (в этом случае установившееся значение отсутствует): , (6.2). , (6.2).где  — запаздывание объекта; — запаздывание объекта;  — условная постоянная времени объекта. — условная постоянная времени объекта.2. Перерегулирование  . Это отношение амплитуд двух последующих выбегов регулируемого параметра при возмущении по нагрузке или заданию. Оно характеризует колебательность переходного процесса при регулировании . Это отношение амплитуд двух последующих выбегов регулируемого параметра при возмущении по нагрузке или заданию. Оно характеризует колебательность переходного процесса при регулировании (6.3). (6.3).Оно также может характеризоваться отношением амплитуды первого выбега к изменению задания при возмущении по заданию.  (6.4). (6.4).Величина перерегулирования зависит от динамических свойств объекта, закона регулирования и настроек регулятора. 3. Время регулирования  . Оно характеризует быстродействие системы и определяется интервалом времени от начала переходного процесса до момента нового установившегося состояния выходной величины (с точностью 5 % до ). . Оно характеризует быстродействие системы и определяется интервалом времени от начала переходного процесса до момента нового установившегося состояния выходной величины (с точностью 5 % до ).Время регулирования зависит от динамических свойств объекта, закона регулирования, настроек регулятора. Следует отметить, что в некоторых случаях решающее значение имеет максимальное динамическое отклонение параметра  а в ряде случаев — интегральный показатель или время регулирования. а в ряде случаев — интегральный показатель или время регулирования.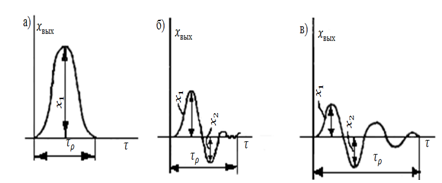 Рис.6.2 Три вида типовых оптимальных процессов регулирования: а — апериодический процесс с минимальным временем регулирования ; б — процесс с 20-процентным перерегулированием; в — процесс с минимальной квадратичной площадью отклонения. Качество процесса регулирования определяется видом переходного процесса. На рис. 45 представлено три вида типовых оптимальных процессов регулирования: а — апериодический процесс с минимальным временем регулирования ; б — процесс с 20-процентным перерегулированием и минимальным временем первого полупериод ; в — процесс с минимальной квадратичной площадью отклонения, что соответствует 40—45-процентному перерегулированию.Очевидно, что один из приведенных процессов регулирования может удовлетворять технологическим требованиям тепловых процессов, т. е. будет являться оптимальным. 4. Статическая ошибка, или остаточное отклонение параметра  . Это отклонение регулируемого параметра от заданного значения после завершения переходного процесса (см. рис. 1, кривая в). Остаточное отклонение параметра является характерным для пропорциональных регуляторов, установленных на статических объектах. . Это отклонение регулируемого параметра от заданного значения после завершения переходного процесса (см. рис. 1, кривая в). Остаточное отклонение параметра является характерным для пропорциональных регуляторов, установленных на статических объектах.Существуют прямые и косвенные методы оценки качества процессов регулирования. Прямой метод основан на решении дифференциальных уравнений, описывающих процессы регулирования. Он является точным и надежным, однако довольно сложным для ручного расчета. Косвенные методы оценки качества процессов регулирования являются приближенными, но более простыми и удобными для инженерных расчетов. К косвенным методам относятся: 1) исследование качества процессов регулирования по распределению корней характеристического уравнения в плоскости комплексного переменного; 2) метод интегральных оценок качества по величине некоторых определенных интегралов; 3) метод частотных характеристик (метод Солодовникова); 4) моделирование процессов регулирования на аналоговых вычислительных машинах. Последние два метода являются достаточно точными, поэтому они получили наибольшее распространение в инженерной практике. |