управление судном книга. На якоре 203 Штормовые диаграммы 184186 Штормовые условия в дрейфе
 Скачать 3.93 Mb. Скачать 3.93 Mb.
|

Глава 3. ИНЕРЦИОННО-ТОРМОЗНЫЕ ХАРАКТЕРИСТИКИ СУДНА 3.1. Общие сведения об инерционно-тормозных свойствах суднаЯ=Ь (3.1)(it где m* — масса судна с учетом присоединенной массы воды при движении по оси X (т*«т+Хц), кг; R — сила сопротивления воды, Н; Я* -сила упора винта (винтов), Н. I Знак «—» перед силой сопротивления указывает, что эта сила всегда направлена против движения, знак «+» перед силой упора винта означает, что упор направлен вперед, а знак «—» — назад. Произведение массы на ускорение пгх представляет собой силу инерции. При торможении ускорение имеет отрицательный знак. Присоединенная масса воды при движении по оси X обычно принимается равной 10% массы судна (А.ц»0,1т). Глава 2. СВЕДЕНИЯ ОБ УПРАВЛЯЕМОСТИ 2.1. Устойчивость на курсе и поворотливость 120 2.2.Движение судна под влиянием переложенного руля 124 2.3.Влияние параметров корпуса и руля на управляемость 127 2.4.Влияние боковых сил, обусловленных работой гребного винта 128 2.S. Управляемость одновинтового судна на заднем ходу 132 2.6.Управление многовинтовым судном 133 Глава 3. ИНЕРЦИОННО-ТОРМОЗНЫЕ ХАРАКТЕРИСТИКИ СУДНА 3.1. Общие сведения об инерционно-тормозных свойствах судна 134 3.2.Движение при изменениях режиме работы двигателя на переднем ходу 138 3.3. Торможение судна 32 (з!9> 35 (1+1/ГГТ)(,. у ,/7П) 36 7- _о,5, 40 4.2.Ветровой дрейф 41 ,; = 2(«° -45° + 1807ц„). (4.24) 46 4.3.Маневрирование в условиях ветра 46 Глаша 5. МАНЕВРЕННЫЕ ЭЛЕМЕНТЫ СУДНА И ИХ ОПРЕДЕЛЕНИЕ 5.1. Судовая информация о маневренных элементах 51 5.2.Определение маневренных элементов из натурных испытаний 52 5.3.Расчетное и экспериментально-расчетное определение элементов поворотливости 62 г. 64 6.1.Средства активного управлении (САУ) 73 6.3.Использование якорей при маневрировании 78 л 89 JjL Р т 104 7.4.Управление судами при буксировке 114 Глава 8. СНЯТИЕ СУДНА С МЕЛИ 8.1. Причины посадки судов на мель 118 8.2.Действия экипаже судна, севшего на мель 120 /п,(1 !-*.?,) 150 Q = ^cp F, (9.14) 157 ч 168 V -$г+‘ • 210 лгг 237 t©^'=0^>^00==£Э— 268 где /( — коэффициент пропорциональности (сопротивления), кг/м;
Сила сопротивления воды (3.4) где | — безразмерный гидродинамический коэффициент полного сопротивления, завися* щий от формы (обводов) корпуса и состояния его поверхности (шероховатости) ; р — массовая плотность воды (для морской воды средней солености можно принимать р«1020 кг/м3); И — площадь смоченной поверхности корпуса, ма. Из сопоставления формул (3.3) и (3.4) ясно, что *=5-§-а. (3.5) т. е. коэффициент k зависит не только от формы и состояния поверхности корпуса, но и от его размеров, характеризуемых площадью смоченной поверхности, поэтому для каждого судна значение коэффициента k изменяется с изменением осадки. Сила упора винта зависит от диаметра DB, шагового отношения Я/Db, дискового отношения 0, числа лопастей г, частоты вращения л, поступи винта ЛР= у D’ а также от взаимодействия винта с корпусом судна. Сила упора изолированного (без учета взаимодействия с корпусом) винта определяется для установившегося движения передним или задним ходом по формуле Р = -^—p«*Di, (3.6) ‘ ' Р где Р — сила упора изолированного винта, Н; п — частота вращения, об/с; Ар — коэффициент упора винта, определяемый по специальным диаграммам для переднего или заднего хода в зависимости от характеристик винта и поступи ЛР. Формула (3.6) для установившегося движения дает надежные результаты, но если движение происходит с изменением скорости, то возникают переходные процессы, существенно влияющие на силу упора, что особенно проявляется в режиме торможения, когда судно движется вперед, а винт работает задним ходом. Более подробно эти вопросы будут разобраны при рассмотрении различных режимов движения судна. Для изменения скорости движения судна приходится изменять частоту вращения винта (винтов), а иногда и изменять направление вращения, т. е. выполнять реверсирование. Способ выполнения этих операций зависит от типа про- пульсивного комплекса двигатель — движитель. 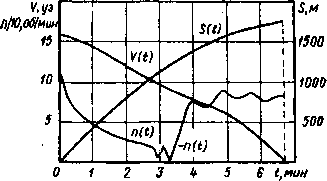 Рис. 3.1. Графики торможения теплохода «Серов» с полного переднего хода полным назад Наибольшее распространение на морских судах в качестве главных двигателей имеют: двигатели внутреннего сгорания (ДВС), турбозубчатые агрегаты (ТЗА) и гребные электродвигатели (ГЭД). В качестве движителей используются ВФШ и ВРШ, образующие пропульсив- ные комплексы: ДВС-ВФШ, ТЗА-ВФШ, ГЭД-ВФШ, а также любой двигатель — ВРШ. Рассмотрим некоторые характерные особенности выполнения реверсов перечисленных пропульсивных комплексов. Рассмотрим некоторые характерные особенности выполнения реверсов перечисленных пропульсивных комплексов, Реверсирование ДВС-ВФШ. На большинстве теплоходов установлены ДВС, напрямую связанные с гребным валом. Чтобы выполнить реверс, сначала закрывается подача топлива на ДВС. Затем, когда обороты снизятся, из пусковых баллонов в цилиндры подается воздух, проворачивающий двигатель в обратном направлении, после этого впрыскивается топливо, которое в результате сжатия воспламеняется, т. е. происходит запуск двигателя на топливе. Для большинства теплоходов характерен замедленный реверс при торможении с полного переднего хода. Это объясняется тем, что давление контрвоздуха, подаваемого при реверсе в цилиндры, оказывается недостаточным для преодоления момента, приложенного к винту со стороны набегающего потока воды. Для большинства ДВС уверенный реверс возможен лишь тогда, когда обороты переднего хода вращающегося в турбинном режиме винта (после прекращения подачи топлива) снизятся до значения 25—35 % от оборотов полного переднего хода, что соответствует снижению скорости судна примерно до значения 60—70 % от скорости полного переднего хода. При этом судно длительное время движется по инерции и успевает пройти значительный путь, нередко намного превышающий путь, проходимый судном после запуска двигателя на задний ход. На рис. 3.1 приведены графики скорости V(t) и тормозного пути s(7), частоты вращения винта n(t), построенные по результатам натурных испытаний теплохода «Серов» водоизмещением 19 500 т при торможении с полного переднего хода (1/0=16,4 уз) полным задним ходом (ПХП—ПХЗ 1). Если же торможение выполняется при сниженной начальной скорости, например с малого переднего хода, то реверс выполняется быстро за 10—15 с и путь торможения резко сокращается. Двигатели внутреннего сгорания на заднем ходу развивают практически такую же мощность, как и на переднем. Реверсирование ТЗА-ВФШ. На турбоходах при торможении используется турбина заднего хода, мощность которой составляет примерно 50% мощности турбины переднего хода (обе турбины имеют общий вал). Для выполнения реверса с помощью маневрового клапана перекрывается пар на сопла турбины переднего хода и открывается на сопла заднего хода. Необходимо учитывать, что ротор турбины вращается с частотой порядка нескольких тысяч оборотов в 1 мин, поэтому его остановка с помощью контрпара, подаваемого на лопатки турбины заднего хода, не может быть выполнена мгновенно. Тем не менее реверс турбины с полного переднего хода выполняется значительно быстрее, чем на теплоходах, обычно не более чем за 1 мин, но упор винта на заднем ходу сравнительно невелик. Благодаря указанным свойствам тормозные пути турбоходов при торможении с полного переднего хода обычно бывают того же порядка, что и на теплоходах при прочих равных условиях. Однако при малых начальных скоростях тормозные характеристики турбоходов из-за малой мощности турбины заднего хода значительно хуже, чем у теплоходов. Реверсирование ГЭД-ВФШ. Существуют различные типы электроприводов на постоянном и переменном токе. Судовые энергетические установки электроходов обычно состоят из нескольких дизель- или турбогенераторов, питающих гребные электродвигатели, что позволяет оперативно варьировать мощностями в зависимости от конкретных условий работы судна. Особенно удобны электроприводы на многовинтовых ледоколах и других судах специального назначения, условия работы которых изменяются в широких пределах. Реверсирование электродвигателей осуществляется коммутированием питающего напряжения. Тормозные характеристики электроходов обычно несколько лучше, чем теплоходов. Реверсирование ВРШ. Изменение направления упора ВРШ происходит в результате поворота лопастей винта без изменения направления вращения двигателя и без снижения частоты вращения. Эффективность ВРШ при торможении существенно зависит от скорости срабатывания привода поворота лопастей. Механизмы поворота лопастей современных ВРШ, управляемые с мостика, позволяют изменить шаг вита с полного переднего на полный задний ход за 5—10 с, что обеспечивает резкое уменьшение тормозного пути. Суда с такими приводами обладают наилучшими реверсивными характеристиками. Винт в направляющей насадке по сравнению с аналогичным винтом без насадки при одинаковой частоте вращения создает силу упора при торможении приблизительно на 15% меньше.
При плавании в условиях ограниченной видимости, в районах скопления других судов, на подходах к портам, маневрировании на рейдах приходится для движения нужными скоростями часто менять режим работы двигателя на переднем ходу, т. е. изменять силу упора винта. Судно, обладающее большой массой и, следовательно, инерционностью, не может сразу приобретать скорость, соответствующую новому режиму движения. На всех судах устанавливаются определенные дискретные ре>кй- мы двигателя (двигателей) для работы передним и задним ходом, которые по установившейся традиции имеют следующие названия: самый малый ход, малый ход, средний ход, полный маневренный ход, полный ход. В конце каждого из указанных названий добавляется слово «вперед» или «назад». В дальнейшем для обозначения режимов будем пользоваться для краткости сокращениями: СМХП, МХП, СХП, ПХПм, ПХП, а также СМХЗ, МХЗ и т. д. Для каждого из перечисленных режимов устанавливается частота вращения винта. При этом для ПХП частота вращения соответствует мощности главного двигателя, обеспечивающей движение судна с эксплуатационной плановой скоростью. Поскольку коэффициент сопротивления воды зависит от осадки судна, то для реализации мощности двигателя в грузу и в балласте устанавливаются обычно разные значения частоты вращения: в балласте частота вращения винта и соответствующая ей эксплуатационная скорость судна несколько выше, чем в грузу. Для промежуточных режимов частоты вращения устанавливаются таким образом, чтобы скорости судна имели по отношению к скорости полного хода примерно следующие значения: СХП «0,7 ПХП; МХП« «0,5 ПХП; СМХГ1«0,ЗПХП. Иногда для СМХП выбирается минимальная частота вращения, при которой еще обеспечивается устойчивая работа двигателя внутреннего сгорания. При этом скорость судна, соответствующая этой частоте, может быть меньше 0,3 от скорости полного хода. Скорость ПХПм выбирается обычно несколько выше скорости среднего хода. Примерная зависимость между частотами вращения винта и соответствующими им скоростями судна выражается формулой (3.7) Эта формула позволяет приближенно определить скорость судна, соответствующую заданной частоте вращения винта, если известна скорость при какой-то другой частоте вращения. Процесс движения судна после изменения частоты вращения работающего передним ходом двигателя описывается дифференциальным уравнением (3.1), которое для данного случая и с учетом подстановки
т. (3.8) где Рв — текущее значение силы упора винта на переднем ходу, Н. •Как показывает анализ модельных и натурных экспериментов, полезная сила упора винта на переднем ходу при изменении режима двигателя быстро приобретает значение, соответствующее этому новому режиму, после чего изменяется мало, т. е. остается близкой к постоянному значению в процессе изменения скорости судна Сказанное позволяет сделать допущение, что полезная сила упора винта на переднем ходу в переходном процессе изменения скорости судна остается постоянной, т. е. (3.9) 29 Когда переходный процесс изменения скорости заканчивается, т. е. скорость приобретает установившееся значение (У=УуСт), ускорение (или замедление) судна становится равным нулю - kV^r = Pe, (3.10) а так как Ре в процессе изменения скорости принята постоянной (3.9), то дифференциальное уравнение (3.8) можно записать в виде m*-7T=k(vUr-v*), (зло где Vyc-r — значение установившейся скорости для используемого режима двигателя, м/с;
Если в конкретном случае V<VyCT, то уравнение (3.11) описывает процесс увеличения скорости судна. Если же У>УуСт, то происходит снижение скорости. После разделения переменных |