управление судном книга. На якоре 203 Штормовые диаграммы 184186 Штормовые условия в дрейфе
 Скачать 3.93 Mb. Скачать 3.93 Mb.
|

|
V* Коэффициент активности торможения для разных конкретных условий может быть меньше единицы, больше единицы, равен единице или равен нулю. В каждом из перечисленных случаев меняется вид исходного уравнения (3.29), следовательно, меняется и вид его решений. Приведем решения уравнения (3.29) относительно времени и пути торможения в зависимости от значений константы а. а < 1 (1+1/ГГТ)(,. у ,/7П) l„i Путь торможения при: О < а 1 In Ц- ; (3.36) 2(1—в) „ V* (1 —а) уг -f- а (■-*> а — 1 mxfk (3.37) 2 а — О s=T£',,1_v!"- (3-38) Дифференциальное уравнение (3.29) и его решение (3.32—3.38) представляют собой математическую модель торможения, разработанную в ОВИМУ на основе анализа результатов натурных испытаний судов. Данная модель способна воспроизводить любое практически встречающееся изменение скорости при активном торможении. Это обеспечивается тем, что изменяющаяся по закону (3.27) сила упора винта в сумме с силой сопротивления (3.3) может давать суммарную тормозящую силу как возрастающую (а>1), так и снижающуюся (а< 1) в процессе торможения, т. е. описывать как выпуклые, гак и вогнутые графики V(t) разной степени кривизны вплоть до предельного случая, каковым является пассивное торможение (а=0). Для наглядной оценки адекватности рассматриваемой математической модели ниже использованы результаты натурных испытаний торможения теплохода «Большевик М. Томас» водоизмещением 22 850 т. На рис. 3.3 показано пассивное торможение судна ПХПм—Стоп, а на рис. 3.4 — торможение с реверсированием двигателя СХП—ПХЗ. Экспериментальные измерения пути и скорости показаны на обоих 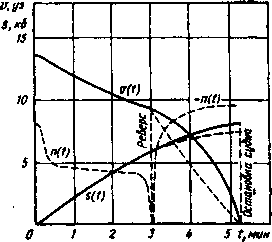 Рис. 3.4. Графики торможения теплохода «Большевик М. Томас» с реверсированием двигателя  Рис. 3.3. Графики пассивного торможения теплохода «Большевик М. Томас» рисунках черными точками, а графики s(t) и V(t), рассчитанные по формулам — сплошными линиями. Момент реверсирования (см. рис. 3.4) указан вертикальной штриховой линией. На обоих рисунках приведены также графики частоты вращения винта, построенные по результатам экспериментальных измерений. На участке активного торможения от момента реверсирования до остановки судна (см рис. 3.4) для сравнения показаны штриховыми линиями также графики пути и скорости, построенные по формулам
Помимо описанных, существует еще ряд моделей, из которых можно отметить линейную математическую модель, в которой текущее значение силы сопротивления воды принято пропорциональным скорости судна в первой степени, т. е. R=KV (К — коэффициент сопротивления при линейной зависимости, кг/с), а сила упора — постоянной (Р,.= Р=const). Имеющиеся результаты натурных экспериментов в виде элементов пассивного и активного торможения по каждому испытанному судну позволяют получить статистические данные точности расчетных значений путей пассивного и активного торможения для каждой математической модели. Как известно, в общем случае торможения полный тормозной путь содержит участки пассивного и активного торможения (второй и третий периоды). Точность полного тормозного пути в соответствии с теорией ошибок можно оценивать по формуле (3.39) т11 «ш отн * где Мот -относительное среднее квадратическое отклонение (СКО) полного тормозного пути, %; отн — относительные СКО соответственно пассивного и активного тормозных путей, %; sN
m “Тг —отношение активного участка к полному тормозному пути\ Таблица 3.1. Оценка точности математической модели торможения судба
Путь первого периода s1 (прохождение команды) из-за его малости на оценку точности практически не влияет. Отношение i—. зависит от типа двигателя и его реверсивного устройства, а также от начальной скорости судна. В реальных условиях это отношение находится в большинстве случаев в пределах 0,15-7-0,75. Для данных значений в табл. 3.1 приведены результаты оценки точности рассмотренных математических моделей для пассивных, активных и полных тормозных путей, выполненные на базе натурных испытаний торможения с полного и полного маневренного хода на 16 различных судах с проведением надежных траекторных измерений. Напомним, что при оценке точности расчетные тормозные пути определялись с использованием значений коэффициента сопротивления и силы упора винта, найденных из условия равенства между расчетным к экспериментальным временем торможения. Поэтому приведенные в табл. 3.1 оценки характеризуют потенциальную точность, с которой каждая модель способна описывать процесс торможения судна при условии использования оптимальных значений коэффициента сопротивления и силы упора винта. Любая из рассмотренных математических моделей может быть использована для расчета ИТХ, если известны значения коэффициента сопротивления и силы упора винта для каждого конкретного судна при заданных условиях торможения. Эти необходимые значения могут быть найдены какими-то расчетными или экспериментально-расчетными способами. Поскольку получаемые таким путем значения коэффициента сопротивления и силы упора винта будут содержать неизбежные погрешности, т. е. не будут оптимальными, то ИТХ, полученные с их использованием, будут характеризоваться (статистически) большими погрешностями, чем те, которые указаны в табл. 3.1. Контрольные вопросы. 1. Каковы особенности реверсирования главного двигателя на теплоходах с гребным винтом фиксированного шага? 2. Из каких периодов в общем случае состоит процесс торможения судна? 3. Чем отличаются друг от друга основные математические модели торможения судна? 4. Как изменяется полезная сила упора винта в процессе активного торможения? 5. Как влияет загрузка судна на время и путь его торможения? в. Чем объясняется зависимость максимальной силы упора винта при активном торможении от осадки судна? Глава 4. УПРАВЛЕНИЕ СУДНОМ В УСЛОВИЯХ ВЕТРА
Сила ветра оценивается в баллах двенадцатибалльной шкалы, приведенной в МТ-75. Скорость ветра в судовых условиях измеряется над верхним мостиком с помощью анемометра. При этом измеряется так называемая кажущаяся скорость ветра UP, вектор которой представляет собой разность двух векторов — вектора истинного ветра ТГИ и вектора скорости судна Р, т. е. W = Wh-V. (4.1) Вектор кажущегося ветра, помимо скорости, характеризуется курсовым углом qw, т. е. углом между носовой частью ДП и кажущимся направлением ветра. За направление ветра принимается то, откуда дует ветер (ветер дует «в компас»). Курсовые углы ветра измеряются от 0 до 180° вправо и влево от ДП (курсовые углы правого или левого борта). Геометрический смысл формулы (4.1) характеризуется векторным треугольником, показанным на рис. 4.1 (а, б, в). Из рисунка видно, что под влиянием движения судна вперед со скоростью V курсовой угол кажущегося ветра будет всегда меньше, чем истинного. Аэродинамическая сила и ее момент. Равнодействующая сила давления ветра на надводную часть — аэродинамическая сила А не совпадает в общем случае с направлением кажущегося ветра, а отклоняется в сторону траверзного направления (см. п. 1.1). Надводная часть судна находится в потоке воздуха под углом атаки, равным курсовому углу кажущегося ветра. При этом на надводной части создается аэродинамическая сила А, имеющая, как показано на рис. 4.2, продольную Ах и поперечную Ау составляющие. Продольная составляющая Ах влияет на скорость судна, а поперечная Ау вызывает боковое перемещение судна. Поперечную аэродинамическую силу (Н) можно рассчитать по формуле (4.2) где Со* — безразмерный коэффициент поперечной аэродинамической силы, зависящий от формы надводной части судна и курсового угла кажущегося ветра; Qy— боковая площадь парусности (площадь проекции надводной части на ДП), м2; 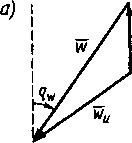 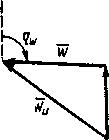 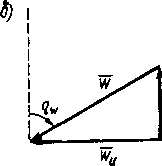 Рис. 4.1. Курсовой угол кажущегося ветра на движущемся судне ра —■ массовая плотность воздуха (рв» 1,226 кг/м). Безразмерный аэродинамический коэффициент Сау по данным натурных и модельных исследований для разных судов находится обычно в пределах от 0,8 sin qw до 1,3 sin qw. с?
w Рис. 4.2. Аэродинамическая сила и ее составляющие Точка приложения аэродинамической силы в соответствии со свойствами крыла смещается от ЦП навстречу потоку воздуха (см. рис. 4.2), т. е. при носовых курсовых углах ветра в сторону носа, а при кормовых курсовых углах — в корму. Величина смещения зависит от курсового угла кажущегося ветра: чем острее угол атаки между ДП и направлением ветра, тем дальше от ЦП смещается точка приложения аэродинамической силы. Максимальное смещение точки приложения аэродинамической силы (при курсовых углах, близких к 0 и 180°) составляет в среднем приблизительно четверть длины судна, т. е. 0,25L, а при курсовых углах кажущегося ветра, равных 90°, точка приложения аэродинамической силы совпадает с ЦП. Таким образом, в общем случае на корпус судна действует не только поперечная аэродинамическая сила, вызывающая дрейф судна, но и момент этой силы, стремящийся развернуть судно вокруг вертикальной оси, проходящей через ЦТ. Плечо поперечной аэродинамической силы 1Л относительно ЦТ можно определить по приближенной формуле: (4.3) 7 -о Iе, I <ци 4w /д-0,25+ L ^ | |||||||||||||||||||||||||||||||