управление судном книга. На якоре 203 Штормовые диаграммы 184186 Штормовые условия в дрейфе
 Скачать 3.93 Mb. Скачать 3.93 Mb.
|

|
Рис. 4.6. Силы и моменты, действующие на судно в зависимости от курсового угла кажущегося ветра: a) 45*; б) qw— 90е: *) V»*I35* V„, благодаря чему судно движется относительно воды с углом дрейфа а. Косое натекание потока воды на подводную часть корпуса с углом атаки, равным углу дрейфа, приводит к появлению поперечной гидродинамической силы Rv, точка приложения которой смещена от ЦТ вперед до ДП навстречу потоку в соответствии с формулой (4.4) на расстояние /д. Гидродинамический момент RvIr стремится развернуть судно в направлении увеличения угла дрейфа, т. е. носом к ветру. Таким образом, очевидно, что аэро- и гидродинамический моменты в рассматриваемом случае имеют разные знаки. Если при этом учесть, что силы Ау и Rv уравновешивают друг друга и (если не учитывать сравнительно небольшую боковую силу руля PPJ/) приблизительно равны по абсолютной величине, то сравнительные величины их моментов полностью определяются значениями плеч 1А и /*. Величины этих плеч, как известно, зависят от углов атаки q°w и а°. Чем меньше угол, тем больше плечо, причем при одинаковых углах атаки величина смещения точки приложения гидродинамической силы примерно в 2 раза больше, чем аэродинамической. Угол дрейфа а° в большинстве случаев не очень велик, поэтому даже при достаточно остром курсовом угле ветра q°w плечо гидродинамической силы /д, как правило, больше плеча аэродинамической силы /А. Следовательно, при сложении двух моментов, имеющих разные знаки, результирующий момент имеет то же направление, что и гидродинамический, т. е. стремится разворачивать судно носом в направлении к ветру. Указанная тенденция отмечена стрелкой. Результирующий момент при носовых курсовых углах ветра является разностью аэро- и гидродинамического моментов, поэтому он обычно не очень велик, что позволяет удерживать судно на заданном курсе с помощью переложенного на некоторый угол руля, создающего поперечную силу Рру и момент МР=РР(/-^-. Следует, однако, отметить, что при сильном ветре результирующий момент, разворачивающий нос судна на ветер, будет все же значительным по величине, и если скорость судна при этом невелика, то момент руля, пропорциональный квадрату скорости судна, может оказаться недостаточным для удержания судна на курсе. Явление, связанное с невозможностью предотвратить разворот судна на ветер, назовем условно потерей управляемости первого рода. При очень сильном ветре или очень малой скорости судна возникает большой угол дрейфа (напомним, что угол дрейфа пропорционален отношению скорости кажущегося ветра и скорости судна по курсу— W/V.v), что приводит к уменьшению плеча гидродинамической силы /я, т. е. к сближению точек приложения поперечных аэро- и гидродинамической сил. При этом результирующий момент становится меньше, и судно снова обретает способность удерживаться на заданном курсе. При дальнейшем увеличении отношения W/Vx и возрастании угла дрейфа наступает ситуация, когда плечо гидродинамической силы lR становится меньше плеча аэродинамической силы /А и судно вместо наблюдавшегося ранее стремления к ветру, начинает проявлять тенденцию уваливать под ветер. Для удержания на курсе в этой ситуации потребуется уже перекладка руля не под ветер, а на ветер. Дальнейшее увеличение отношения W/Vx и угла дрейфа приводит в конечном счете к невозможности удерживать судно от уваливания под ветер, и наступает потеря управляемости второго рода. Таким образом, при движении на носовых курсовых углах ветра по мере возрастания отношения WJVXf например, за счет снижения скорости Vx судно сначала испытывает потерю управляемости первого рода, затем снова становится управляемым и, наконец, попадает в зону потери управляемости второго рода. Отметим, что при достаточно острых носовых курсовых углах ветра судно может, минуя зону потери управляемости первого рода, сохранять способность удерживаться на курсе вплоть до потери управляемости второго рода. Ветер в борт. При направлении ветра прямо в борт судна (рис. 4.6,6) точка приложения поперечной аэродинамической силы совпадает с ЦП, поэтому для рассматриваемого случая, когда ЦП совпадает с ЦТ, плечо аэродинамической силы равно нулю, т. е. аэродинамический момент отсутствует. Под действием гидродинамического момента нос судна стремится развернуться в сторону ветра. В отличие от предыдущего случая стремление судна приводиться к ветру выражено более сильно, так как отсутствует аэродинамический момент обратного знака. На рис.
Для удержания на курсе в данной ситуации потребуется перекладка руля под ветер на больший угол, чем это имело место в случае носовых курсовых углов при прочих равных условиях. Естественно также, что при ветре в борт судна произойдет потеря управляемости первого рода при меньшем значении отношения W/Vx, чем это имело место при носовых курсовых углах ветра. При ветре в борт потеря управляемости второго рода не наступает. В случае остановки двигателя судно остается в положении лагом к ветру, т. е. переходит к дрейфу на стопе. Ветер со стороны кормовых курсовых углов. При набегании потока воздуха со стороны кормовых углов (рис. 4.6, в) точка приложения поперечной аэродинамической силы смещается на величину плеча /А, которое в данном случае в соответствии с формулой (4.3) будет иметь отрицательное значение, что указывает на смещение в сторону кормы. Так как аэро- и гидродинамическая силы, направленные в противоположные стороны, в рассматриваемом случае имеют плечи разного знака, то очевидно, что их моменты будут направлены в одном и том же направлении. Следовательно, результирующий момент будет равен их сумме. Последний случай по сравнению с ранее рассмотренными характеризуется максимальным моментом, разворачивающим судно носом к ветру, что показано на рисунке тремя стрелками (см. рис. 4.6, в). В этом случае для удержания судна на курсе требуются большие углы перекладки руля под ветер, а потеря управляемости первого рода наступает при относительно малом значении отношения W/Vx. Потеря управляемости второго рода при кормовых курсовых углах не наблюдается. Приведенные выше оценки позволяют представить общую картину поведения судна при маневрировании в условиях ветра, т. е. носят качественный характер. Количественные оценки управляемости конкретного судна при маневрировании в условиях ветра могут быть получены расчетным путем. Расчетное определение управляемости в условиях ветра. Для аналитического определения условий потери управляемости при маневрировании необходимо выполнить совместное решение второго и третьего уравнений системы (1.1) для установившегося движения, т. е. при отсутствии инерционных сил в уравнениях должны быть оставлены аэро- и гидродинамическая силы на корпусе и их моменты, а также сила и момент на руле. С учетом сказанного, уравнения могут быть записаны в виде: (4.26) В системе (4.26) разные знаки у поперечных аэро- и гидродинамических сил указывают, что эти силы всегда направлены противоположно друг другу, а двойной знак у силы руля указывает, что руль может быть переложен как на ветер, так и под ветер. Двойной знак у аэродинамического момента показывает, что этот момент по направлению может совпадать или не совпадать с гидродинамическим моментом, что зависит от положения точек приложения сил Ау и Rv относительно ЦТ судна. Знаком результирующего момента определяется сторона перекладки руля. Руль должен быть переложен таким образом, чтобы его момент компенсировал результирующий момент аэро- и гидродинамической сил на корпусе. Система (4.26) выражает одновременно два условия: равновесие сил в поперечной плоскости и равновесие моментов этих сил относительно вертикальной оси, проходящей через ЦТ судна. При практических расчетах аэродинамическую силу Ау можно определять по формуле (4.2), а ее плечо — по формуле (4.3). Гидродинамическая сила Ry определяется формулой (4.6), а ее плечо формулой (4.4). Боковая сила руля (4.27) где Sp — площадь пера руля, м2; Сpv — коэффициент подъемной силы руля, который можно приближенно рассчитать по формуле, где Хр — относительное удлинение пера руля, определяемое по формуле (2.6); б — угол перекладки руля, град. Формула (4.27) дает приблизительно верный результат для руля, не попадающего в струю от винта (например, на двухвинтовом судне с рулем в ДП). Если же руль находится за винтом, то его эффективность повышается в зависимости от так называемой нагрузки винта по упору, которая в теории корабля учитывается введением специального коэффициента, зависящего от силы упора винта, его диаметра, а также скорости судна. Для приближенных практических расчетов можно для руля, расположенного за винтом, увеличить результат, даваемый формулой (4.28), в 1,6—2 раза, либо соответственно увеличить площадь пера руля, введя понятие эффективной площади пера руля. Сущность совместного решения системы (4.26) заключается в нахождении такого значения W/Vx (при выбранном курсовом угле вет- 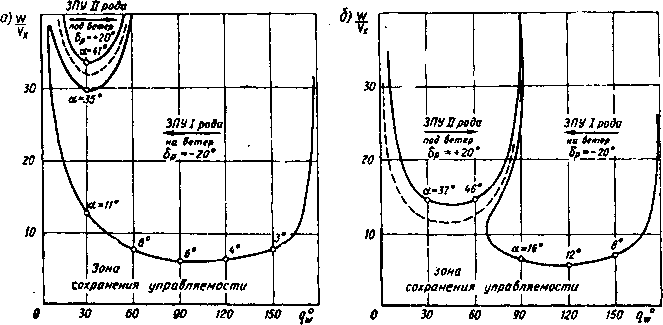 Рис. 4.7. Зоны управляемости балкера «Харитон Греку» при плавании в условиях ветра: а — в грузу; б — в балласте ра), которое обеспечивало бы равновесие моментов вокруг вертикальной оси, чем определяется граничное условие потери управляемости. Эта задача решается путем определения по первому уравнению
От угла дрейфа зависят гидродинамическая сила и ее плечо, а значит гидродинамический момент Мп. Следовательно, можно найти такое значение о°, при котором выполняется условие равновесия моментов. Если при данном курсовом угле ветра для данного судна существует потеря управляемости как первого, так и второго рода, то описанное решение позволяет найти два условия равновесия: одно для руля, переложенного под ветер, а второе — на ветер. Угол перекладки руля 6°р рекомендуется принимать при расчетах равным 20° вместо перекладки на борт (30—35 ), так как необходимо иметь некоторый резерв, требуемый для выравнивания рыскания судна. Такие расчеты были выполнены на ЭВМ для балкера длиной 200 м с кормовым расположением надстройки в грузу (d„=cfK= = 12,33 м) и в балласте (й„=5,5 м; dK=8,15 м). При указанных посадках ЦП в грузу располагается :на 13,1 м в корму от ЦТ (/цп==—0,066), а в балласте практически совпадает с ЦТ (7ЦП«0). Положение ЦБС принято совпадающим по длине с ЦТ (7цвс=0). Площадь парусности в грузу принята равной 1975 м2, а в балласте 3075 м*. Результаты выполненных {расчетов представлены на рис. 4.7 в координатах q°w—W/Vx в виде кривых, ограничивающих зоны потери управляемости (ЗПУ). На этих линиях через каждые 15° курсового угла указаны значения углов дрейфа, которые будет иметь судно при соответствующих значениях W/Vx и q°w. Диаграмма позволяет предсказывать поведение судна, попавшего в ЗПУ. Так, если судно окажется в ЗПУ I рода (см. рис. 4.7,а), то оно начнет приводиться к ветру, что на диаграмме выразится пере- мещением точки влево до границы данной зоны, т. е. до такого значения q°m на котором судно обретет способность удерживаться с помощью руля, переложенного на 20° под ветер. Если же судно окажется в ЗПУ II рода, то оно начнет уваливать, что выразится на диаграмме перемещением точки вправо до границы этой зоны, т. е. до значения q°w, на котором судно может удерживаться рулем, переложенным на 20° к ветру. Пунктирные линии между ЗПУ определяют значения W/Vx, при которых судно способно удерживаться на данных q°w без перекладки руля на какой-либо средний угол. Отметим, что в грузу при любых значениях q°w (см. рис. 4.7, а) сначала наблюдается потеря управляемости I рода, т. е. судно приводится к ветру. Потеря управляемости II рода наступает лишь при весьма больших значениях отношения W/Vx. Такое поведение судна в грузу обусловлено существенным смещением ЦП в корму от ЦТ. В балласте же, когд* ЦП находится вблизи ЦТ, на носовых курсовых углах ветра ЗПУ I рода не наступает вовсе (см. рис. 4.7,6). Приведенная диаграмма дает лишь ориентировочные значения, так как она рассчитана по приближенным зависимостям. Тем не менее диаграмма позволяет получить наглядное представление об общем характере поведения судна при маневрировании в условиях ветра. Контрольные вопросы. 1. Где располагается по длине судна точка приложения поперечной аэродинамической силы в зависимости от курсового угла кажущегося ветра? 2. Какое влияние оказывает руль на угол дрейфа при движении судна постоянным курсом? 3. Как располагаются суда по отношению к направлению ветра при дрейфе с остановленными машинами? 4. Каково общее условие сохранения управляемости судна при плавании в условиях ветра? 5. Каковы условия потери управляемости судна при небольшой силе ветра? в. При каких курсовых углах ветра наиболее вероятна потеря управляемости I рода? Глаша 5. МАНЕВРЕННЫЕ ЭЛЕМЕНТЫ СУДНА И ИХ ОПРЕДЕЛЕНИЕ 5.1. Судовая информация о маневренных элементах Для эффективного управления судном при маневрировании в стесненных условиях, помимо знания общих закономерностей поведения судна как объекта управления, необходимо знать основные свойства конкретного судна, относящиеся в первую очередь к его ходкости, поворотливости и инерционно-тормозным характеристикам. Эти свойства обычно называют маневренными элементами. Информация о маневренных элементах судна в виде таблицы вывешивается в ходовой рубке на мостике судна. До 70-х гг. форма и содержание таблицы маневренных элементов определялись в каждой стране национальными правилами или традициями. В 1971 г. Резолюцией А.209(7) Международной морской организации (ИМО) была принята первая рекомендация, устанавливающая примерный набор сведений, подлежащих включению в таблицу маневренных элементов для вывешивания в ходовой рубке судна. С учетом рекомендаций ИМО в нашей стране были разработаны правила о форме, содержании, способах и условиях определения маневренных элементов, включенные в Наставления по организации штурманской службы на судах Минморфлота СССР 1978 г. (НШС-76), а затем и в НШС-82. _ В ноябре 1987 г. Резолюцией А.601 (15) ИМО была принята новая рекомендация, в соответствии с которой информация о маневренных характеристиках судна должна состоять из трех частей: лоцманской карточки, вручаемой лоцману по прибытии его на борт; таблицы маневренных характеристик (для ходовой рубки); формуляра маневренных характеристик. Предполагается, что требования о форме и содержании маневренных характеристик войдут в новое Наставление, которое разрабатывается вместо НШС-82.
Натурные методы определения основных маневренных элементов основаны на последовательных определениях места судна по каким- либо ориентирам в процессе выполнения заданных маневров. Обсервации по-возможности выполняются через короткие промежутки времени, засекаемые с помощью секундомера, пущенного в начале маневра. После окончания наблюдений обсервованные точки наносят в масштабе на планшет и соединяют плавной линией, т. е. получают траекторию судна в процессе любого выполненного маневра. Такая траектория позволяет снять в принятом масштабе нужные элементы маневрирования, а замеченные по секундомеру моменты дают возможность получить соответствующие временные характеристики. Достоинством такого метода является наглядность и возможность обнаружения промаха, если таковой был допущен при какой-то обсервации. Необходимость определения маневренных элементов с достаточной точностью ограничивает выбор способов траекторных измерений. Традиционные в навигации способы обсервации по береговым ориентирам для этой задачи мало подходят, так как при удалении от берега на расстояние более 1 мили точность обсерваций оказывается уже недостаточной. Кроме того, глубины в районе маневрирования должны быть достаточно большими, чтобы исключить влияние мелководья, а сам район не должен находиться на пути движения других судов во избежание ситуации опасного сближения. Необходимость выполнения всех перечисленных условий затрудняет выбор подходящего полигона, поэтому определение маневренных элементов на достаточном удалении от берега более предпочтительно, Рассмотрим некоторые способы траекторных измерений, применяемые для определения маневренных элементов. * Наблюдения с помощью фазовой РНС. Для определения маневренных элементов указанным способом необходимо заранее выбрать район маневрирования в зоне действия одной из цепочек РНС «Дек- ка» с глубинами, превышающими по-возможности осадку судна не менее чем в 2—3 раза. Масштаб издаваемых навигационных карт с сетками гипербол слишком мелок для данной задачи, поэтому следует вычертить планшет для выбранного района в масштабе порядка 1 ; 20 ООО с нанесенной сеткой оцифрованных гипербол, т. е, фрагмент карты, охватывающий акваторию 5X5 морских миль (для малых судов размеры полигона могут быть уменьшены). Для нанесения на планшет гипербол с достаточной точностью следует учитывать, что ширина точной дорожки dT для каждой пары станций* |