управление судном книга. На якоре 203 Штормовые диаграммы 184186 Штормовые условия в дрейфе
 Скачать 3.93 Mb. Скачать 3.93 Mb.
|

отношение длины между перпендикулярами к ширине;
Расчетное и экспериментально-расчетное определение элементов поворотливости Он —- коэффициент полноты площади погруженной части ДП, рассчитываемой по формуле (2.5); ХР — относительное удлинение руля, рассчитываемое по формуле (2.6); 5Р—относительная площадь руля, выраженная в процентах к площади погружен- В качестве второго фактора выбран угол дифферента судна i|>0, выраженный в градусах, (5.11) ф° - где dH и dK — осадка носом и кормой (при дифференте на нос угол отрицателен). С использованием указанных двух факторов получены структурно подобные эмпирические формулы для элементов циркуляции (см. п. 2.2), выраженных для сопоставимости в длинах судна. Эти формулы приведены ниже с указанными в скобках значениями стандартных относительных погрешностей (%): Ф (5.12) /|=6,41—— 4-0,70ф° —0,93, (±9,0); 'о /t — 5,84 0,68ф° —2,15, (± 15,5); У 6° Ф Ф (5.13) (5.14) (5.15) где 6° — угол перекладки руля. Пользуясь фактором корпуса и руля Ф, можно также определить приближенно относительную скорость судна Руст (по отношению к начальной скорости) на установившейся циркуляции? А (5.16) Густ= 1 - 0,056 — Используя полученные по формулам (5.12) — (5.15) значения вы- двига 1\ прямого смещения h, тактического диаметра DT и диаметра установившейся циркуляции 5уСт, можно приближенно построить траекторию циркуляции одновинтового судна для заданных значений дифферента и угла перекладки руля. По приведенным формулам рассчитаны элементы циркуляции с рулем, переложенных право на борт для теплохода «Большевик М. Томас», и построена траектория, показанная на рис. 5.5 (условно принималось, что после поворота на 90° циркуляция переходит в установившуюся). 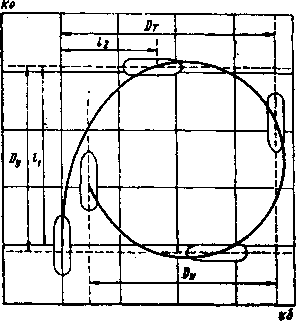 Рис. 5.5. Траектория циркуляции с рулем на борту теплохода «Больше»)» М. Томас», построенная расчетным способом Расчеты по формулам (5.12— 5.15) дают приближенные результаты, которые не могут в полной мере заменить результаты натурных наблюдений. Однако практически затруднительно выполнить натурные испытания при различных осадках и дифферентах судна из-за больших затрат эксплуатационного времени. Поэтому обычно приходится ограничиваться экспериментальным определением элементов циркуляции только при какой-либо одной посадке судна. В этих случаях использование эмпирических формул в сочетании с экспериментальными значениями элементов циркуляции позволяет получить экспериментально-расчетные значения этих элементов для любой заданной посадки судна. Для этого нужно сначала найти по формулам расчетные значения элементов для той же посадки и тех углов перекладки руля, которые были во время эксперимента, а затем рассчитать переходные коэффициенты: V/.5 JL г. (5.17) В приведенных выражениях в числителях стоят экспериментальные, а в знаменателях расчетные значения элементов циркуляции. Если из экспериментов обнаружилась существенная несимметричность правых и левых циркуляций, то переходные коэффициенты еле* дует рассчитать отдельно для правых и левых поворотов. Пользуясь полученными переходными коэффициентами, можно приближенно определить экспериментально-расчетные значения элементов циркуляции для любой заданной посадки судна, если расчетные значения элементов для этой посадки умножить на соответствующие переходные коэффициенты, ранее полученные по формулам (5.17). Полученные таким путем экспериментально-расчетные значения элементов циркуляции существенно точнее расчетных, а построенные по ним траектории сохраняют все особенности, присущие данному судну.
Для практического расчета ИТХ по приведенным в гл. 3 формулам необходимо определить коэффициент сопротивления корпуса и силу упора винта для данного судна. Расчет коэффициента сопротивления корпуса. На основе регрес- . минного анализа результатов натурных наблюдений пассивного торможения на 18 одновинтовых морских судах разного типа было полупи подвыражение для коэффициента k (кг/м): fc —5880-}-0,654Si -у, (5.18) I•* - площадь смоченной поверхности, м2; В
Данная эмпирическая формула по статистической оценке позволяет определять коэффициенты сопротивления корпуса для одновиито- вых судов, а следовательно, и путь пассивного торможения со стан- 1артной относительной погрешностью около 9,4 %. Площадь смоченной поверхности Й с достаточной для практических целей точностью рассчитывается по эмпирической формуле: f 0,492- (5,19) 0«--Д2/3 ^4,854 и \ - нодоп*мсицение-судна, т. Расчет максимальной силы упора винта на заднем ходу. Сила упо- ии вши а Ли**, которую развивает винт к моменту остановки судна
яш«-= */*>"* (6.20) | и сила упора винга, работающего задним ходом н швартовном режиме с ча стотой л, Н; А,, - коэффициент упора винта на заднем ходу в швартовном режиме. Коэффициент упора kp может быть выбран из специальных дна >рамм для расчета реверсирования винтов либо с достаточной для НФШ точностью рассчитывается по эмпирической формуле: (н н \
// I че — отношение шага кинти к его диаметру (шаговое отношение); • н
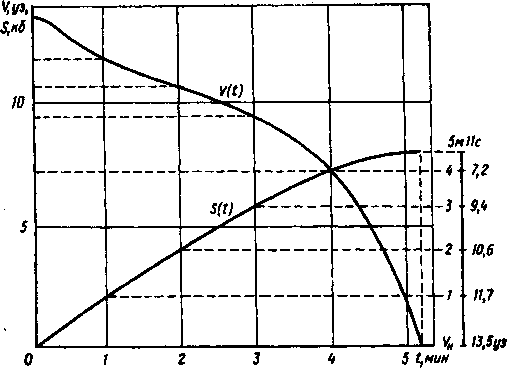
г число лопастей. Нели гребной винт имеет направляющую насадку, то полученный по формуле (5.21) коэффициент kp следует уменьшись на 15%, т. е. \ множить на 0,85. В реальных условиях на величину полезной силы упора при тор* можении оказывает влияние взаимодействие винта с корпусом судна. Как показал регрессионный анализ натурных наблюдений активного юрможении (25 экспериментов) на одновинтовых судах, чем больше площадь погруженной части мидель-шпангоута по сравнению с площадью диска винта, тем большую полезную силу упора развивает пинт при торможении. Влияние корпуса учитывается коэффициентом усиления упора Суу, для расчета которого используется эмпирическая формула, полученная в результате регрессионного анализа, St Суу 0,508-1-0,106 ——, (5.22) Ad где Sr£ — площадь погруженной части мидель-шпангоута = рЗ'— коэффи циент полноты площади мидель-шпангоута), м2; / nD\ \ Ad — площадь диска винта I Алв —1. м2. Максимальная сила упора винта Ртах рассчитывается по формуле: ^шах^^шв ^уу- (5.23) Точность определения коэффициента Суу по формуле (5.22) характеризуется стандартной относительной погрешностью, равной 12,3 %. Следовательно, с такой же точностью определяется и Ртах по формуле (5.23). Расчет коэффициента активности торможения. По найденным значениям Ртах и k можно рассчитать коэффициент активности торможения: о = , (5.24) к (0,514V„)* ’ V V где VH — начальная скорость третьего периода, уз. Расчетное определение времени и пути торможения судна. Как известно (см. п. 3.3), процесс торможения состоит из трех периодов. В первом периоде (период прохождения команды) скорость судна остается равной исходной скорости Vo. Достаточно задаться продолжительностью первого периода tl, чтобы определить путь sl (величину tl рекомендуется принимать равной 5 с). Время и путь второго и третьего периодов определяются по формулам (3.32—3.38) в соответствии с рекомендациями, изложенными в пп. 3.1 и 3.3. Полное время и полный путь торможения определяются как сумма соответствующих значений по трем периодам, т. е. по формулам (3.16). Стандартная относительная погрешность расчетного пути второго периода т1К™ равна погрешности расчета коэффициента сопротивления, т. е., как было показано выше, составляет 9,4 %. Погрешность расчетного пути третьего периода зависит как от погрешности коэффициента к, так и от погрешности расчетной силы упора, которая, как уже отмечалось, равна 12,3 %. С использованием этих значений путем дифференцирования формулы (3.36) для активного тормозного пути по k и Ртах и перехода к конечным приращениям получено, что тшотн = 8,0 % (для среднего значения а=1,6). Точность расчета полного тормозного пути S зависит от соотношения между вторым s11 и третьим $ш участками тормозного пути. Стандартная ошибка полного тормозного пути М отн определяется по формуле (3.39). При использовании характерного для большинства случаев тор- su можения диапазона —g— в пределах 0,15—0,75 получено: AfoTH = 6,4— 6,9%. Статистическая оценка путем прямого сравнения расчетных тормозных путей с экспериментальными полученными из многочисленных натурных наблюдений подтверждает значение найденной стандартной погрешности. Универсальная диаграмма торможения и ее использование. Вместо расчетов по формулам (3.32—3.38) инерционно-тормозные характеристики можно получить по универсальной диаграмме (УД), приведенной в прил. 4. УД построена по указанным формулам и позволяет определять время и путь как пассивного, так и активного торможения. Диаграмма состоит из двух независимых частей — верхней и нижней, совмещенных на одном листе. Нижняя часть служит для определения времени торможения или, вернее, вспомогательного произведения VJ, из которого затем определяют t путем деления произведения VHt на известную начальную скорость V„ (VH выражается в узлах, a t в секундах). В диаграмму входят с коэффициентом активности торможения а, после чего по заданному относительному снижению скорости V/VH и параметру Д/£ (А — водоизмещение в тоннах, к — коэффициент сопротивления в кг/м) находят вспомогательное произведение VJ. Таким образом, нижняя часть диаграммы связывает функциональной зависимостью четыре величины VJVa Мк VHt и позволяет определить любую из этих величин, если известны три остальные. Верхняя часть диаграммы связывает функциональной зависимостью четыре величины а VfV „ Л/Л s и предназначена для определения тормозного пути s (кб), но также позволяет определить и любую из этих четырех величин, если три остальные известны. При использовании УД необходимо помнить, что при пассивном торможении коэффициент а всегда равен нулю. Под скоростью VH подразумевается начальная скорость пассивного или активного торможения в зависимости от периода, для которого определяются элементы торможения. Пример. Для контейнеровоза, характеристики которого даны в п. 5.2, рассчитать время и путь при торможении СХП—ПХЗ, если: на СХП V—13,5 уз; максимальная скорость, при которой возможен уверенный реверс, Ур«»9,4 уз; на ПХЗ номинальная частота вращения винта na.x”«§3 об/мин. По результатам расчета построить линейный график торможения для заданного маневра. Решение. » А. Определение коэффициента к и параметра Д/Л: |